1.本发明涉及一种基于双目条纹投影测量系统的自动离焦方法,属于计算机视觉和先进制造与自动化领域。
背景技术:
2.条纹投影测量是计算机视觉和先进制造与自动化领域的重要研究内容,作为一种兼顾精度与效率的密集点云测量方法,是目前较为可靠的复杂工件制造精度控制手段,具有非接触、视场大、成本低等特点。已被广泛研究并应用于各个领域,如逆向工程,质量检测,增强现实,模型试验,大型构件的制造等。为了将条纹投影测量更好地应用于工业场景中,需要着重研究条纹投影测量的自动化。
3.双目条纹投影测量系统通常由两个相机和一个投影仪组成,一般由投影仪投出灰度按正弦(余弦)规律变化的条纹图像到被测物体表面,通过左右相机拍摄经过物体表面调制后的变形条纹图案;然后,通过解相位获得表面上每个点的投影仪图像的像素坐标;最后,根据三角测量技术计算三维世界坐标。
4.在条纹投影系统中,由于投影光学特点与基础电子器件发展水平的差异,系统中的重要部件数字投影仪的性能成为了制约条纹投影测量系统性能提升的主要因素,投影条纹的质量直接影响解相位的精度,进而影响点云的精度。从投影仪离焦可以影响测量精度的现象着手分析,由于投影仪的分辨率有限,在生成条纹图像时,相当于对正弦函数进行采样。因此,对投影仪进行适当离焦可以提高相位匹配的精度,进而影响三维点云测量的精度。又因为在离焦过程中需要不断调整投影仪的对焦距离,如果手动调焦必然导致一定的误差,并且效率低下。使用电控调焦镜头不仅能避免手动调焦带来的误差,并且能规避掉手动调焦繁琐的程序。因此,为了实现自动离焦投影表面形貌测量的实验与性能评估,需要建立对投影光学调焦过程的精确模型,并制定一套电控调焦方案,实现对可调焦(变焦)的镜头组的实时调焦。
技术实现要素:
5.本发明目的在于提供一种基于双目条纹投影测量系统的自动离焦方法,对于条纹投影测量系统中投影仪镜头调焦导致测量精度变化的现象,提出在测量过程中将投影仪进行自动地适度离焦以投出更接近正弦的条纹,从而获得更好的点云测量精度。
6.为了实现上述目的,本发明的方案是:
7.一种基于双目条纹投影测量系统的自动离焦方法,包括如下步骤:
8.步骤1,在双目条纹投影测量系统基础上给投影仪安装电控调焦镜头;
9.步骤2,在计算机里输入转数对所述电控调焦镜头实时调焦;
10.步骤3,通过实验得到不同物距对应的最佳离焦程度,以有效地提高测量的精度,实现离焦测量的自动化。
11.其中,步骤1的电控调焦镜头的电气控制系统分为变焦模块、单片机控制模块和
mcu固件程序三个部分,其中变焦模块安装在电控调焦镜头上,并与所述单片机控制模块相连,控制投影仪焦距;计算机与所述单片机控制模块连接,提供电源,并且通过mcu固件程序,与所述单片机控制模块实时通讯。
12.其中,步骤3的实验阶段,在不同物距处固定平面标定板,然后进行对焦,该物距代表投影仪的对焦距离,并记录此时投影仪的镜头转数,确定所述对焦距离与镜头转数的函数关系。
13.其中,设计特殊图案以判定不同位置投影仪是否精准聚焦。
14.其中,所述特殊图案为“十”字型和“x”字型。
15.其中,步骤3的实验阶段,搭建双目条纹投影测量系统,以在不同离焦程度下测量所述平面标定板的平面度。
16.其中,将所述平面标定板放置在一个物距上,通过计算机不断调控投影仪镜头的转数,从而获得不同的离焦程度,然后进行测量,之后不断改变物距,以不同离焦程度再进行测量,其余参数保持不变。
17.其中,测量所述平面标定板的平面度时,使用复合材料的标定板,以严格要求平板的平面度。
18.其中,步骤3的确定不同物距的最佳离焦程度变化规律,需要在不同物距下,将投影仪调至最佳离焦程度,记录此时变焦镜头的转数,确定物距与镜头转数的函数关系。
19.其中,步骤3的实现离焦测量的自动化,根据已知的物距通过物距与镜头转数的函数关系计算获得镜头转数,将此镜头转数输入到计算机的mcu固件程序,此时变焦镜头将自动转动到最佳离焦状态,之后进行条纹投影测量。
20.本发明的有益结果是:提出了一种投影仪镜头自动离焦的方法,该方法可以实现离焦测量的自动化,并且有效提高测量的精度,该方法具备其潜在的商业价值,为智能制造中的复杂曲面质量控制提供高精度高效率的测量手段。
21.附图简要说明
22.图1是本发明系统结构图。
23.图2是本发明单片机控制模块上位机接口原理图。
24.图3是本发明单片机控制模块供电原理图。
25.图4是本发明单片机控制模块增量编码器接口原理图。
26.图5是本发明单片机控制模块电机实时电力检测系统。
27.图6是本发明mcu(微控制单元,microcontroller unit)原理图。
28.图7是本发明电机初始化流程图。
29.附图标记说明:
30.1-左相机,2-右相机,3-投影仪,4-电控调焦镜头,5-单片机,6-计算机。
具体实施方式
31.下面结合附图进一步阐述本自动离焦的一个具体实施例、工作原理。
32.如图1所示,本发明的系统包括通过投影仪3,投影仪3与计算机6相连,用于投射图案。投影仪3前端装设有电控调焦镜头4,电控调焦镜头4通过单片机5与计算机6相连,用以调节投影仪3焦距。
33.左相机1与右相机2分别设置在投影仪3的左右两侧,并与计算机6相连,用以拍摄投影仪3的投影并将结果传递给计算机6。
34.电控调焦系统利用了一只带有微变焦环和调焦环,并适合安装减速电机的成品电控调焦镜头4。因体积限制增量编码器不太可能累积过多转数,拟采用线数较高的微型磁电编码器。最终采用的是东莞奥凯特的qy1503-cdz迷你编码器,具备abz三路信号输出,单圈单相1024线(ab相经过四细分辨向电路后等效为4096线),等效调焦环角分辨率约为0.9
′
,可满足精密调焦环定位的需求。
35.完成高分辨率编码器的固定,需要综合考虑减速电机总成的尺寸,电动调焦系统的齿轮模数和分度圆直径,编码器固定孔的位置与出轴长度,可供选择的标准模数齿轮的大小,减速电机上已有的齿轮参数等。最终采用了6063铝合金制作编码器固定单元。经过对减速机构自带的齿轮进行测绘和分度圆直径补偿计算(齿数过小存在变位),编码器接驳齿轮选用了30齿0.8模聚甲醛树脂材质,为保障不干涉,有效啮合的前提下的最小齿数,最终与编码器3mm出轴利用顶丝进行角度固定。
36.铝制固定片采用左通孔右调整孔的设计方案,安装时施加一定压力,并在调整孔预紧后用螺丝胶进行锁固,保证了编码器齿轮与调焦齿轮的准确啮合。
37.本样机采用双层堆叠设计:上层为四层印刷电路板设计,主要实现供电、mcu、传感器接口与信号调理、上位机通讯的功能;下层为双面印刷电路板设计实现了多通道的dc电机功率驱动接口,电流监测过流分断的功能。堆叠方案采用了常见的2.54mm间距双排插针插座实现,并采用合适高度的铜柱锁固堆叠体。
38.如图2,上位机接口为供电通讯一体化设计。物理接口采用了当下流行的简化版usb type-c接插件(usb 2.0)。普通的type-c数据线能够承受1a以上的电流,对2~3个减速调焦电机控制系统而言完全够用。这里还利用usb2.0的两根数据线接入了cp2102n usb-uart桥,并与mcu的usart1接口相连,作为主力通讯接口,并预留了stm32 bootloader串口下载的常用信号线连接。
39.如图3,除usb直接供电外,为今后适配更多通道的电机,系统还备用了5mm同轴电源输入接口,采用自动分断的方式单独为电机进行供电。
40.如图4,增量编码器接口设计了两路,采用与编码器配合的六针接口,对编码器进行供电的同时,将编码器的abz三路输出信号并行引入mcu。mcu采用增量编码器专用接口计数模式实现自动加减计数。为拿到绝对量,z相输入单片机5后也采用硬件输入捕捉所存的方式进行处理,以精确的捕获编码器的单圈起点。
41.如图5,电机实时电力检测系统使用了多片集成化单通道h桥驱动芯片drv8876作为dc减速电机的驱动,芯片本身集成电流采样功能并具备缓冲输出接口。通过并接对地电阻进行最大电流设置后,其生成的电压代表了电机的实时电流。由于控制dc电机采用脉宽调制方案,实时电流作为控制内环的重要参量不能随着脉宽调制发生高频变化。这里除了驱动模拟数字转换器模块采用长采样方式以外,还通过二级运放对drv8876输出的实时电流信号进行合适时间常数的滤波和缓冲,最终输入mcu的模拟数字转换器采样单元。
42.如图6,本设计的mcu采用了一片stm32f446rg进行设计,其具备cortex-m4核心,主频168mhz,其具备足够的io资源和各种多功能外设。硬件方案中主要采用了12位模拟数字转换器,负责电流采样和电位器位置采样,计数器和编码器自动计数捕获。方案还加入一块
cr2032纽扣电池,利用了mcu的备用电源系统对编码器的数据进行了非易失性处理,每次系统找到的编码器z相零点位置均被备用电源区域记录,不必每次重启后重新机械归零。
43.mcu固件部分需要实现与上位机通讯,电机状态实时获取,与双闭环控制,另外为方便调试还需要加入独立shell功能。对于单核心的mcu而言运行的任务较多,最终采用了freertos作为mcu的实时操作系统,并抽象出三个任务与高实时性中断处理服务程序。其中shell任务优先级最低但时刻运行;上位机通讯任务优先级稍高,由串口触发释放阻塞条件运行;电机控制任务优先级最高,采用操作系统不可屏蔽高级中断的定时机制对任务进行周期性唤醒。其他采集带电机位置与电流,周期中断等全部硬件定时器相互触发实现。
44.由于是两组齿轮啮合机构同时完成电控调焦镜头4调焦和位置测量,只有一级传动的情况下没有采用复杂的弹性机械预紧机制,而是从定位运动策略上进行改进,只从一个方向逼近需要的绝对调焦位置。单方向逼近的定位策略以固件程序的形式实现。上电后先完成系统初始化,初始化流程如图7。首先系统复位或上电,然后外设初始化,检查电池备份区有无有效数据,如果有,读取备份区数据回写外设寄存器,并写入机械极限和零点值;如果没有,电机测试运转机械初始化,电机转到左右机械找零点,然后再写入机械极限写入零点值,最后在通讯侧初始化,输出当前寄存器信息。寄存器信息被输出到主任务循环中,主任务从上位机获取信息,进行定位,定位成功后将信息写入电池备份区,并向上位机返回信息。主任务循环中电机参数的采集依靠了双环pid控制算法。
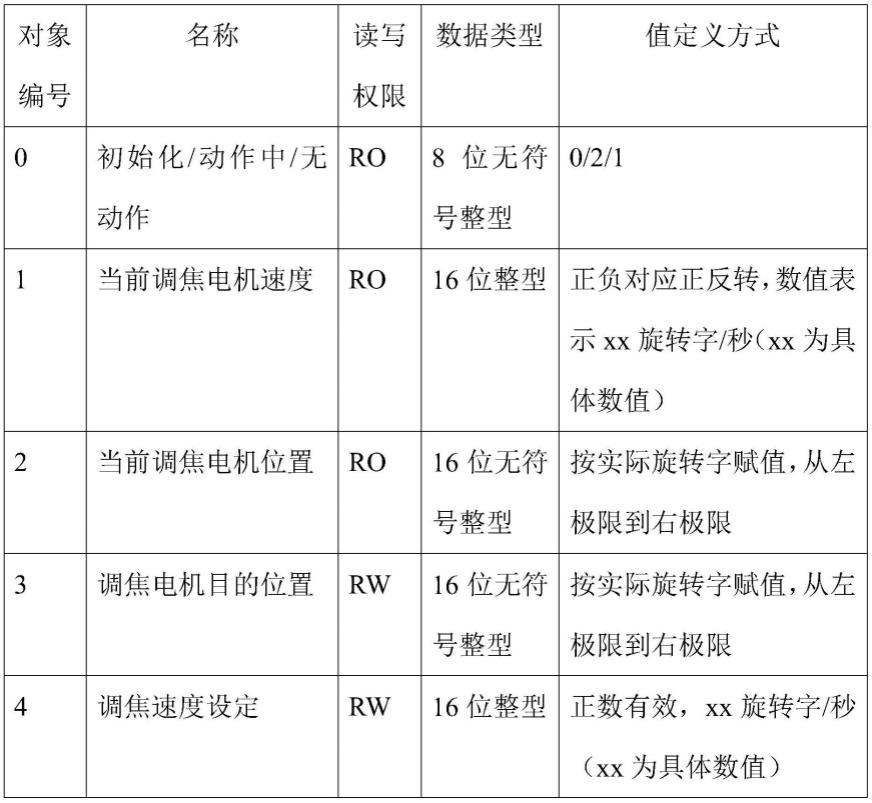
45.上位机通讯与协议处理自成任务,通过统一的控制器属性表进行数据交互。
46.单片机usart1接口通讯参数:波特率115200,8数据位,1停止位,无奇偶校验。下表为控制器统一属性表。
[0047][0048]
下表为通讯协议的格式,通讯协议采用高可读性ascii码进行拟定。
[0049]
从计算机到控制器:
[0050][0051]
其中,指令r为读取,w为写入,ro为只读,d代表数据,例如:$r2#表示读取当前转数值,$r5#表示读取左极限转数值,$r6#表示读取右极限转数值,$w3d22000#表示写入转数值为22000。
[0052]
从控制器到电脑(回复):
[0053]
协议帧头回复类型协议帧尾$rse#
[0054]
其中回复类型r为读取数据的回复,回复内容为对象编号和d加上数据。s为系统状态更新的异步自动回复,初始化为0,动作中为2,无动作为1,e为错误号:0无错误(用于回复主机写指令),1指令错误,2数据超限,3权限错误,4
……
自定义,#为协议帧尾。
[0055]
调焦电机旋转的控制算法最终按速度小环加位置大环进行双闭环实现。实现中均采用了增量式pid算法,其中位置环采用了p结合小i配死区的控制环路,电流环决定dc电机的扭矩,扭矩曲线在每一次接到定位任务开始时规划好,形成坡升坡降曲线,曲线逼近上只采用pd参数以快速达到最合适的扭矩输出,减小超调以降低对电源系统的需求。
[0056]
系统算法控制周期为10ms,采用晶振驱动计数器确定并定时锁存编码器数据,编码器数据预存上一个10ms以便记录增量体现实际运行速度。同时10ms触发模拟数字转换器采样一次,拿到对应drv8876电压反馈输出代表的电流值。这两组数据在本周期内通过全局变量的形式传递给电机控制任务,任务进行输出计算,并将最终结果输出至本电机通道对应的脉宽调制通道上。
[0057]
从实验过程观察位置闭环调整后的值(设置了
±
2计数字的死区)最终误差可达
±
1个编码器计数字,对应调焦环物理误差(调焦环旋转角度,根据传动比和齿条角度覆盖率计算)小于1.8
′
,满足调焦位置控制的预期目标。
[0058]
自动离焦具体步骤如下:
[0059]
(1)搭建双目条纹投影测量系统,将电控调焦镜头4安装到投影仪3上,设计特殊图案(例如“十”字型和“x”字型)以判定投影仪3是否精准聚焦,针对投影仪3的电控调焦镜头4不同的转数,确定对应的对焦距离,建立转数与对焦距离的关系函数。
[0060]
该电控调焦镜头4的电气控制系统分为变焦模块、单片机5控制模块和mcu固件程序三个部分,其中变焦模块安装在投影仪3的电控调焦镜头4上,并与单片机5控制模块相连,控制投影仪3焦距;计算机6与单片机5控制模块连接,提供电源,并且通过mcu固件程序,与单片机控制模块实时通讯。
[0061]
(2)将条纹投影系统物距设置为400mm到600mm,每次间隔50mm。在物距处固定平面标定板,在不同离焦程度下测量所述平面标定板的平面度。测量所述平面标定板的平面度时,使用复合材料的标定板,以严格要求平板的平面度。
[0062]
保持投影仪3亮度、曝光时间、条纹数等其他参数不变,在计算机6里输入转数,对该投影仪3的电控调焦镜头4实时调焦,先将投影仪3对焦距离设定为物距,然后调节电控调焦镜头4,每次转动200转,测量得到平面标定板的点云,最后计算得到平面拟合标准误差。
[0063]
(3)实验在不同物距下,通过三阶多项式拟合建立电控调焦镜头4转数与平面拟合标准误差的函数关系,计算多项式的极小值,极小值对应的电控调焦镜头4转数就是当前物距对应的最佳离焦转数。
[0064]
然后计算每个物距对应的最佳离焦转数,通过三阶多项式拟合建立物距与最佳离焦转数的函数关系。
[0065]
(4)最后,实际测量过程中,首先确定初始物距,然后根据(3)的物距与最佳离焦转数的函数关系,确定此时电控调焦镜头4的最佳离焦转数,将此电控调焦镜头4转数输入到计算机端的mcu固件程序,电控调焦镜头4自动调焦到最佳离焦状态,投射一组条纹,之后进行条纹投影测量。以实现高精度、自动化的条纹投影测量。
[0066]
如上述,已经清楚详细地描述了本发明提出的一种基于双目条纹投影测量系统的
自动离焦方法。
[0067]
需要说明的是,以上所述仅为本发明实施例,仅仅是解释本发明,并非因此限制本发明专利范围。对属于本发明技术构思而仅仅显而易见的改动,同样在本发明保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。