1.本发明涉及冰箱技术领域,尤其涉及一种冰箱和压缩机的振动调节方法。
背景技术:
2.随着人们对高品质生活的不断追求,低噪音、稳定运行的冰箱已成为用户对冰箱的最基本要求,是衡量冰箱品质的基本因素。冰箱运行过程中产生的振动噪声,很大程度上影响着用户对冰箱的体验。
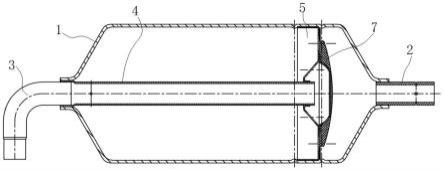
3.冰箱的主要振动噪声来源为压缩机,而压缩机的吸气管和排气管是振动传递的主要路径。如图1所示,图1是现有技术中冰箱的压缩机及其管路结构的示意图,压缩机吸气管和排气管路一端固定在压缩机上,另一端延伸进入箱体发泡层,中间的管路近似于悬空状态。管路的振动主要来源于两个方面,一方面是压缩机振动直接传递到管路,另一方面是管路中制冷剂的脉动使管路产生振动。在往复式压缩机运行过程中,作旋转运动的曲柄会产生旋转惯性力,作往复运动的活塞会产生往复惯性力,它们之间的连接连杆则会同时产生旋转惯性力和往复惯性力,周期性变化的惯性力促使压缩机产生振动,且压缩机向排气管排气过程是间歇性的,这样就会引起管道内的压力忽高忽低,气流速度忽快忽慢,管道内气体压力忽高忽低,气体流速忽快忽慢引起压力脉动,压力脉动会对管路产生一个脉动的激振力,从而激发管路作机械振动,制冷剂压力脉动与压缩机振动会引起管路产生较大振动,同时管路振动传递至箱体,引起箱体振动,发出明显的嗡嗡噪声,降低用户体验。
4.在现有技术中,对压缩机管路的减振方式通常是采用橡胶块来对压缩机管路进行缓冲,减少振动能量。然而,发明人发现现有技术至少存在如下问题:对于变频压缩机,压缩机转速会随着不同的运行环境和运行需求进行改变的,橡胶块仅能衰减特定频率下的振动,不能降低所有频段的振动能量,因而难以起到较好的减振降噪的效果。
技术实现要素:
5.本发明实施例的目的是提供一种冰箱和压缩机的振动调节方法,其能够根据压缩机的工作状态自适应调节固有频率,吸收压缩机管路的振动能量,有效降低压缩机在不同工作状态下的振动和噪声。
6.为实现上述目的,本发明实施例提供了一种冰箱,包括:
7.压缩机以及与其连接的压缩机管路;
8.振动调节系统,包括质量单元和刚度可调单元;所述质量单元和所述刚度可调单元层叠设置,并固定连接于所述压缩机管路的至少一侧;
9.振动传感器,用于检测所述压缩机管路的振动频率;
10.位移传感器,用于检测所述质量单元的位移;
11.控制器,用于:
12.冰箱上电后,获取所述压缩机当前的工作状态;
13.实时获取所述压缩机管路的振动频率和/或所述质量单元的位移;
14.根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,以使所述振动调节系统的固有频率等于或趋近于所述振动频率。
15.作为上述方案的改进,所述根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,具体包括:
16.根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号;所述刚度调整信号用于触发所述刚度可调单元按照所述刚度调整信号,以预设的刚度调整步长和刚度调整周期调整自身的刚度;所述刚度调整信号为刚度增大信号或刚度减小信号;
17.在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号;其中,调节所述刚度调整信号的方式为:保持所述刚度调整信号不变、改变所述调整信号或停止发送刚度调节信号。
18.作为上述方案的改进,所述压缩机的工作状态包括:压缩机处于刚启动运行阶段、压缩机处于刚停止运行阶段、压缩机处于运行转速调整阶段和压缩机处于冰箱开门的阶段。
19.作为上述方案的改进,所述根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号,具体为:
20.若所述压缩机当前处于刚启动运行阶段,向所述刚度可调单元发送刚度增大信号;
21.则,所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
22.在向所述刚度可调单元发送刚度增大信号之后,实时判断所述振动频率的大小变化;
23.若当前时刻所述振动频率大于上一时刻的振动频率,则继续向所述刚度可调单元发送所述刚度增大信号;
24.若当前时刻所述振动频率小于上一时刻的振动频率,则向所述刚度可调单元发送刚度减小信号;
25.若当前时刻所述振动频率维持不变,则停止向所述刚度可调单元发送刚度调整信号。
26.作为上述方案的改进,所述根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号,具体为:
27.若所述压缩机当前处于刚停止运行阶段,向所述刚度可调单元发送刚度减小信号;
28.则,所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
29.在向所述刚度可调单元发送刚度减小信号之后,实时判断所述振动频率的大小变化;
30.若当前时刻所述振动频率小于上一时刻的振动频率,则继续向所述刚度可调单元发送所述刚度减小信号;
31.若当前时刻所述振动频率大于上一时刻的振动频率,则向所述刚度可调单元发送刚度增大信号;
32.若当前时刻所述振动频率维持不变,则停止向所述刚度可调单元发送刚度调整信号。
33.作为上述方案的改进,所述根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号,具体为:
34.若所述压缩机当前处于运行转速调整阶段,向所述刚度可调单元发送刚度增大信号;
35.则,所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
36.在向所述刚度可调单元发送刚度增大信号之后,实时判断所述位移的大小变化;
37.若当前时刻所述位移大于上一时刻的位移,则继续向所述刚度可调单元发送所述刚度增大信号;
38.若当前时刻所述位移小于上一时刻的位移,则向所述刚度可调单元发送刚度减小信号;
39.若当前时刻所述位移维持不变,则停止向所述刚度可调单元发送刚度调整信号。
40.作为上述方案的改进,所述根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号,具体为:
41.若所述压缩机当前处于冰箱开门的阶段,向所述刚度可调单元发送刚度减小信号;
42.则,所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
43.在向所述刚度可调单元发送刚度减小信号之后,实时判断所述位移的大小变化;
44.若当前时刻所述位移大于上一时刻的位移,则继续向所述刚度可调单元发送所述刚度减小信号;
45.若当前时刻所述位移小于上一时刻的位移,则向所述刚度可调单元发送刚度增大信号;
46.若当前时刻所述位移维持不变,停止向所述刚度可调单元发送刚度调整信号。
47.本发明实施例还提供了一种压缩机的振动调节方法,应用于冰箱,所述冰箱包括:
48.压缩机以及与其连接的压缩机管路;
49.振动调节系统,包括质量单元和刚度可调单元;所述质量单元和所述刚度可调单元层叠设置,并固定连接于所述压缩机管路的至少一侧;
50.振动传感器,用于检测所述压缩机管路的振动频率;
51.位移传感器,用于检测所述质量单元的位移;
52.所述方法包括:
53.冰箱上电后,获取所述压缩机当前的工作状态;
54.实时获取所述压缩机管路的振动频率和/或所述质量单元的位移;
55.根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,以使所述振动调节系统的固有频率等于或趋近于所述振动频
率。
56.作为上述方案的改进,所述根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,具体包括:
57.根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号;所述刚度调整信号用于触发所述刚度可调单元按照所述刚度调整信号,以预设的刚度调整步长和刚度调整周期调整自身的刚度;所述刚度调整信号为刚度增大信号或刚度减小信号;
58.在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号;其中,调节所述刚度调整信号的方式为:保持所述刚度调整信号不变、改变所述调整信号或停止发送刚度调节信号。
59.作为上述方案的改进,所述压缩机的工作状态包括:压缩机处于刚启动运行阶段、压缩机处于刚停止运行阶段、压缩机处于运行转速调整阶段和压缩机处于冰箱开门的阶段。
60.与现有技术相比,本发明实施例公开的冰箱和压缩机的振动调节方法。所述冰箱设置有包括质量单元和刚度可调单元的振动调节系统,所述质量单元和所述刚度可调单元层叠设置,并固定连接于所述压缩机管路的至少一侧。在冰箱上电后,获取所述压缩机当前的工作状态,并实时获取所述压缩机管路的振动频率和/或所述质量单元的位移,进而根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,以使所述振动调节系统的固有频率等于或趋近于所述振动频率。采用本发明实施例的技术手段,通过在压缩机管路上设置振动调节系统,控制振动调节系统中的刚度可调单元的刚度大小来产生一定的固有频率,从而与压缩机管路产生共振,吸收压缩机管路的振动能量,进而有效降低了压缩机在不同的工作状态下的振动和噪声,相比于现有技术中采用橡胶减震块来缓冲压缩机管路的振动能量,本发明实施例的技术手段能够更加有效地减少压缩机管路的振动,减少压缩机振动所产生的噪声,极大地提高了用户的使用体验。
附图说明
61.图1是现有技术中冰箱的压缩机及其管路结构的示意图;
62.图2是本发明实施例提供的一种冰箱的结构示意图;
63.图3是本发明实施例中压缩机与振动调节系统的连接结构示意图;
64.图4是本发明实施例中控制器所执行工作在第一种优选实施方式下的流程示意图;
65.图5是本发明实施例中控制器所执行工作在第二种优选实施方式下的流程示意图;
66.图6是本发明实施例中压缩机处于启动阶段控制器所执行工作的流程示意图;
67.图7是本发明实施例中压缩机处于停止阶段控制器所执行工作的流程示意图;
68.图8是本发明实施例中压缩机处于转速调整阶段控制器所执行工作的流程示意图;
69.图9是本发明实施例中压缩机处于冰箱开门阶段控制器所执行工作的流程示意
图;
70.图10是本发明实施例提供的一种压缩机的振动调节方法的流程示意图。
具体实施方式
71.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
72.参见图2,是本发明实施例提供的一种冰箱的结构示意图。本发明实施例提供了一种冰箱10,包括箱体和箱门,箱体内设有至少一储物室,例如冷藏室和/或冷冻室,用于存放具有保鲜或冷冻需求的物品。
73.所述冰箱10还包括制冷系统,用于执行冰箱的制冷操作。需要说明的是,所述冰箱通过所述制冷系统进行制冷操作,提供冷量传输到所述储物室中,以使所述储物室维持在一个恒定的低温状态。具体地,本发明实施例所述的冰箱的制冷系统由压缩机11、冷凝器、干燥过滤器、毛细管、蒸发器构成,所述制冷系统的工作构成包括压缩过程、冷凝过程、节流过程和蒸发过程。所述压缩机11通过压缩机管路12与其他器件连接并执行相应的功能,其中,压缩机管路12包括排气管和回气管。
74.具体地,压缩过程为:插上电冰箱电源线,在箱体有制冷需求的情况下,压缩机开始工作,低温、低压的制冷剂被压缩机吸入,在压缩机汽缸内被压缩成高温、高压的过热气体后排出到冷凝器中;冷凝过程为:高温、高压的制冷剂气体通过冷凝器散热,温度不断下降,逐渐被冷却为常温、高压的饱和蒸气,并进一步冷却为饱和液体,温度不再下降,此时的温度叫冷凝温度。制冷剂在整个冷凝过程中的压力几乎不变;节流过程为:经冷凝后的制冷剂饱和液体经干燥过滤器滤除水分和杂质后流入毛细管,通过它进行节流降压,制冷剂变为常温、低压的湿蒸气;蒸发过程为:随后在蒸发器内开始吸收热量进行汽化,不仅降低了蒸发器及其周围的温度,而且使制冷剂变成低温、低压的气体。从蒸发器出来的制冷剂再次回到压缩机中,重复以上过程,将电冰箱内的热量转移到箱外的空气中,实现了制冷的目的。
75.进一步地,所述冰箱10还包括振动调节系统13,用于实现对压缩机系统的振动调节,以降低压缩机管路的振动噪音。所述振动调节系统13包括质量单元131和刚度可调单元132。质量单元131即为质量块,其质量为预先设置且固定不变的,具体可以根据实际情况进行设置,刚度可调单元132位刚度可变的压电材料。所述质量单元131和所述刚度可调单元132层叠设置,并固定连接于所述压缩机管路12的至少一侧。
76.在一种优选的实施方式下,参见图3,是本发明实施例中压缩机与振动调节系统的连接结构示意图。在所述压缩机管路12的两侧均分别设置一组质量单元131和刚度可调单元132。在设置过程中,先在压缩机管路12的一侧表面上设置刚度可调单元132,在刚度可调单元132的远离压缩机管路12的一侧表面上再设置质量单元131,且质量单元131和刚度可调单元132通过固定机构固定连接在压缩机管路的表面上。所述压缩机管路12可以为排气管或回气管,当然,也可以同时在排气管和回气管上分别设置振动调节系统13。
77.所述冰箱10还包括振动传感器14和位移传感器15,振动传感器14与压缩机管路12
连接,例如设置在压缩机管路12的表面,用于检测压缩机管路12的振动频率;位移传感器15与质量单元131连接,例如设置在质量单元131的表面,用于检测质量单元131的位移。作为举例,以压缩机管路12处于静止状态时质量单元131所在位置为初始点,当冰箱运行过程中,压缩机管路12发生振动,带动质量单元131运动,位移传感器15则可以检测到质量单元131相对于所述初始点产生的位移。
78.所述冰箱10还包括控制器16,控制器16分别与振动调节系统13、振动传感器14和位移传感器15连接并进行信息交互,从而获取振动传感器14检测到的压缩机管路12的振动频率和位移传感器15检测到的质量单元131的位移,以及对振动调节系统13进行控制。
79.具体地,参见图4,是本发明实施例中冰箱的门体处于打开状态的结构示意图。控制器16用于执行步骤s11至s13:
80.s11、冰箱上电后,获取所述压缩机当前的工作状态;
81.s12、实时获取所述压缩机管路的振动频率和/或所述质量单元的位移;
82.s13、根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,以使所述振动调节系统的固有频率等于或趋近于所述振动频率。
83.所述振动调节系统13的工作原理为:质量单元131与刚度可调单元132构成固有频率可调节的振动调节系统,系统的固有频率f=k/m,其中,k指的是刚度可调单元132的刚度大小,m指的是质量单元131的质量。通过变化的刚度k来调节系统的固有频率,当系统的固有频率f与压缩机管路12的振动频率相同或者接近时,质量单元131与刚度可调单元132构成的振动调节系统与压缩机管路12产生共振,从而吸收压缩机管路12的振动能量,降低压缩机管路12的振动。
84.在本发明实施例中,冰箱上电后,控制器16实时获取压缩机11当前所处的工作状态,并实时获取振动传感器14检测到的压缩机管路12的振动频率和位移传感器15检测到的质量单元131的位移。压缩机11的工作状态很大程度上决定了压缩机管路12的振动特性,例如振动频率变化情况等,考虑压缩机11的工作状态,能够更好地确定对刚度可调单元132的刚度调整方向,再结合压缩机管路12的振动频率和质量单元131的位移,综合确定刚度可调单元132的刚度调节方向,从而向刚度可调单元132发送相应的刚度调节指令,调节刚度可调单元132的刚度变大、变小或维持不变,以使振动调节系统13的固有频率等于或趋近于所述振动频率。
85.本发明实施例提供了一种冰箱,设置有包括质量单元和刚度可调单元的振动调节系统,所述质量单元和所述刚度可调单元层叠设置,并固定连接于所述压缩机管路的至少一侧。在冰箱上电后,获取所述压缩机当前的工作状态,并实时获取所述压缩机管路的振动频率和/或所述质量单元的位移,进而根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,以使所述振动调节系统的固有频率等于或趋近于所述振动频率。采用本发明实施例的技术手段,通过在压缩机管路上设置振动调节系统,控制振动调节系统中的刚度可调单元的刚度大小来产生一定的固有频率,从而与压缩机管路产生共振,吸收压缩机管路的振动能量,进而有效降低了压缩机在不同的工作状态下的振动和噪声,相比于现有技术中采用橡胶减震块来缓冲压缩机管路的振动能量的方式,本发明实施例的技术手段能够更加有效地减少压缩机管路的振动,减少压缩机
振动所产生的噪声,极大地提高了用户的使用体验。
86.作为优选的实施方式,本发明实施例在上述实施例的基础上进一步实施,步骤s13,也即所述根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,具体包括步骤s131和s132:
87.s131、根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号;所述刚度调整信号用于触发所述刚度可调单元按照所述刚度调整信号,以预设的刚度调整步长和刚度调整周期调整自身的刚度;所述刚度调整信号为刚度增大信号或刚度减小信号;
88.s132、在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号;其中,调节所述刚度调整信号的方式为:保持所述刚度调整信号不变、改变所述调整信号或停止发送刚度调节信号。
89.参见图5,是本发明实施例提供的一种冰箱在第二种优选实施方式下的结构示意图。在发明实施例中,控制器16在冰箱上电工作后,获取压缩机11当前的工作状态,并根据压缩机当前的工作状态确定刚度可调单元132的刚度大小调整方向,具体是刚度变大还是刚度变小,从而向刚度可调单元132发送相应的刚度调整信号,具体是刚度增大信号或刚度减小信号。
90.接着,控制器16实时获取压缩机管路12的振动频率和质量单元131的位移,根据所述振动频率的变化特征,或所述位移的变化特征,或是振动频率和位移两者的变化特征,来确定是继续输出所述刚度调整信号还是改变为输出另一刚度调整信号,来调整振动调节系统13的固有频率,亦或是停止输出刚度调整信号,以维持振动调节系统13的固有频率不变,使得振动调节系统13的固有频率趋近于压缩机管路12的振动频率,实现共振。
91.需要说明的是,所述刚度可调单元132接收到所述刚度调整信号之后,根据所述刚度调整信号的指示,以一定的调整步长和调整周期来调整自身的刚度大小,作为举例,所述预设的刚度调整步长为
△
k,所述调整周期为5s,则当刚度可调单元132持续收到刚度增大信号时,刚度可调单元132每隔5s则将自身当前的刚度k增大
△
k,使得当前的刚度变为(k
△
k);同理,当刚度可调单元132持续收到刚度减小信号时,刚度可调单元132每隔5s则将自身当前的刚度k减小
△
k,使得当前的刚度变为(k
‑△
k),直到刚度可调单元未收到刚度调整信号为止。
92.采用本发明实施例的技术手段,考虑了压缩机的当前工作状态对压缩机管路的振动特性的影响,从而根据压缩机的工作状态初步确定对刚度可调单元的刚度调整方向,使得刚度调整之后得到的系统固有频率的结果能更快适应压缩机管路的振动频率的变化,接着根据压缩机管路的振动频率或位移的变化,进一步对刚度可调单元的刚度进行细调,使得系统的固有频率与压缩机管路的振动频率相近,振动调节系统与压缩机管路产生共振,吸收压缩机管路的振动能量,进而有效降低了压缩机在不同的工作状态下的振动和噪声。
93.在具体的实施方式下,所述压缩机的工作状态包括:压缩机处于刚启动运行阶段、压缩机处于刚停止运行阶段、压缩机处于运行转速调整阶段和压缩机处于冰箱开门的阶段;其中,所述运行转速调整阶段包括运行转速升高阶段和运行转速降低阶段。
94.可以理解地,当压缩机11处于上述工作状态下时,压缩机系统的运行不稳定,压缩机内部的压力波动变化明显,引起管道内的压力忽高忽低,气流速度忽快忽慢,进而引起压
力脉动,压力脉动会对管路产生一个脉动的激振力,从而激发管路作机械振动,制冷剂压力脉动与压缩机振动会引起管路产生较大振动,同时管路振动传递至箱体,引起箱体振动,发出明显的嗡嗡噪声。因此针对压缩机的上述工作状态,需要特别进行振动调节控制。
95.在第一种优选的实施方式下,参见图6,是本发明实施例中压缩机处于启动阶段控制器所执行工作的流程示意图。步骤s131,也即所述根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号,具体为:
96.若所述压缩机当前处于刚启动运行阶段,向所述刚度可调单元发送刚度增大信号。
97.则步骤s132,也即所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
98.在向所述刚度可调单元发送刚度增大信号之后,实时判断所述振动频率的大小变化;
99.若当前时刻所述振动频率大于上一时刻的振动频率,则继续向所述刚度可调单元发送所述刚度增大信号;
100.若当前时刻所述振动频率小于上一时刻的振动频率,则向所述刚度可调单元发送刚度减小信号;
101.若当前时刻所述振动频率维持不变,则停止向所述刚度可调单元发送刚度调整信号。
102.在本发明实施例中,若压缩机处于刚启动运行阶段,此过程为瞬时的,且压缩机管路的振动逐渐明显,若不进行控制,噪声会逐渐明显。控制器16向刚度可调单元132发送刚度增大信号,以使刚度可调单元132增大自身的刚度,接着,控制器16实时判断压缩机管路12的振动频率的变化特性,若压缩机管路12的振动频率持续增大,则控制器16持续输出刚度增大信号,使刚度可调单元132的刚度增加,振动调节系统13的固有频率f也逐渐增加,从而吸收压缩机管路的振动能量;若压缩机管路12的振动频率开始减少,则控制器16输出刚度减小信号,使刚度可调单元132的刚度减小,振动调节系统13的固有频率f也逐渐减小,从而振动调节系统13与压缩机管路12的共振匹配,吸收压缩机管路的振动能量,减小噪声;若压缩机管路12的振动频率保持不变,则控制器16停止输出刚度调整信号,维持刚度可调单元132的刚度不变,振动调节系统13与压缩机管路12形成稳定的共振。
103.在第二种优选的实施方式下,参见图7,是本发明实施例中压缩机处于停止阶段控制器所执行工作的流程示意图。步骤s131,也即所述根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号,具体为:
104.若所述压缩机当前处于刚停止运行阶段,向所述刚度可调单元发送刚度减小信号;
105.则步骤s132,也即所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
106.在向所述刚度可调单元发送刚度减小信号之后,实时判断所述振动频率的大小变化;
107.若当前时刻所述振动频率小于上一时刻的振动频率,则继续向所述刚度可调单元发送所述刚度减小信号;
108.若当前时刻所述振动频率大于上一时刻的振动频率,则向所述刚度可调单元发送刚度增大信号;
109.若当前时刻所述振动频率维持不变,则停止向所述刚度可调单元发送刚度调整信号。
110.在本发明实施例中,若压缩机处于停机阶段,此过程为瞬时的,且压缩机管路的振动逐渐减小,若不进行控制,振动调节系统13与压缩机管路的共振不匹配,该过程仍会存在噪声。控制器16向刚度可调单元132发送刚度减小信号,以使刚度可调单元132减小自身的刚度,接着,控制器16实时判断压缩机管路12的振动频率的变化特性,若压缩机管路12的振动频率减小,则控制器16持续输出刚度减小信号,使刚度可调单元132的刚度减小,振动调节系统13的固有频率f也逐渐减小,从而振动调节系统13与压缩机管路12的共振匹配,吸收压缩机管路的振动能量,减小噪声;若压缩机管路12的振动频率开始增大,则控制器16输出刚度增大信号,使刚度可调单元132的刚度增大,振动调节系统13的固有频率f也逐渐增大,从而吸收压缩机管路的振动能量,减小噪声;若压缩机管路12的振动频率保持不变,则控制器16停止输出刚度调整信号,维持刚度可调单元132的刚度不变,振动调节系统13与压缩机管路12形成稳定的共振。
111.在第三种优选的实施方式下,参见图8,是本发明实施例中压缩机处于转速调整阶段控制器所执行工作的流程示意图。步骤s131,也即所述根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号,具体为:
112.若所述压缩机当前处于运行转速调整阶段,向所述刚度可调单元发送刚度增大信号;
113.则步骤s132,也即所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
114.在向所述刚度可调单元发送刚度增大信号之后,实时判断所述位移的大小变化;
115.若当前时刻所述位移大于上一时刻的位移,则继续向所述刚度可调单元发送所述刚度增大信号;
116.若当前时刻所述位移小于上一时刻的位移,则向所述刚度可调单元发送刚度减小信号;
117.若当前时刻所述位移维持不变,则停止向所述刚度可调单元发送刚度调整信号。
118.在本发明实施例中,压缩机在运行过程中会根据实际运行需求调整自身的运行转速,若压缩机处于转速调整阶段,包括转速升高和转速降低,此时压缩机管路的振动会发生明显变化,若不进行控制,该过程会存在明显噪声。控制器16向刚度可调单元132发送刚度增大信号,以使刚度可调单元132增大自身的刚度,接着,控制器16实时判断质量单元131的位移的变化特性,若质量单元131的位移持续增大,则控制器16持续输出刚度增大信号,使刚度可调单元132的刚度增加,振动调节系统13的固有频率f也逐渐增加,从而吸收压缩机管路的振动能量,减小噪音;若质量单元131的位移开始减少,则控制器16输出刚度减小信号,使刚度可调单元132的刚度减小,振动调节系统13的固有频率f也逐渐减小,从而振动调节系统13与压缩机管路12的共振匹配,吸收压缩机管路的振动能量,减小噪声;若质量单元131的位移保持不变,则控制器16停止输出刚度调整信号,维持刚度可调单元132的刚度不变,振动调节系统13与压缩机管路12形成稳定的共振。
119.可以理解地,压缩机管路的振动频率大小与质量单元的位移大小呈一定的线性关系,当压缩机当前处于运行转速调整阶段时,也可以通过检测压缩机管路的振动频率来实现对刚度可调单元的刚度调整。
120.具体地,在所述若所述压缩机当前处于运行转速调整阶段,向所述刚度可调单元发送刚度增大信号之后,所述步骤s132,也即所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
121.在向所述刚度可调单元发送刚度增大信号之后,实时判断所述振动频率的大小变化;
122.若当前时刻所述振动频率大于上一时刻的振动频率,则继续向所述刚度可调单元发送所述刚度增大信号;
123.若当前时刻所述振动频率小于上一时刻的振动频率,则向所述刚度可调单元发送刚度减小信号;
124.若当前时刻所述振动频率维持不变,则停止向所述刚度可调单元发送刚度调整信号。
125.在第四种优选的实施方式下,参见图9,是本发明实施例中压缩机处于冰箱开门阶段控制器所执行工作的流程示意图。步骤s131,也即所述根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调整信号,具体为:
126.若所述压缩机当前处于冰箱开门的阶段,向所述刚度可调单元发送刚度减小信号;
127.则步骤s132,也即所述在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
128.在向所述刚度可调单元发送刚度减小信号之后,实时判断所述位移的大小变化;
129.若当前时刻所述位移大于上一时刻的位移,则继续向所述刚度可调单元发送所述刚度减小信号;
130.若当前时刻所述位移小于上一时刻的位移,则向所述刚度可调单元发送刚度增大信号;
131.若当前时刻所述位移维持不变,停止向所述刚度可调单元发送刚度调整信号。
132.在本发明实施例中,若在压缩机的运行过程中,用户打开冰箱门进行物品存取,此时压缩机的运行参数也会发生明显变化,若不进行控制,该过程会存在明显噪声。控制器16向刚度可调单元132发送刚度减小信号,以使刚度可调单元132减小自身的刚度,接着,控制器16实时判断质量单元131的位移的变化特性,若质量单元131的位移减小,则控制器16持续输出刚度减小信号,使刚度可调单元132的刚度减小,振动调节系统13的固有频率f也逐渐减小,从而振动调节系统13与压缩机管路12的共振匹配,吸收压缩机管路的振动能量,减小噪声;若质量单元131的位移开始增大,则控制器16输出刚度增大信号,使刚度可调单元132的刚度增大,振动调节系统13的固有频率f也逐渐增大,从而吸收压缩机管路的振动能量,减小噪声;若质量单元131的位移保持不变,则控制器16停止输出刚度调整信号,维持刚度可调单元132的刚度不变,振动调节系统13与压缩机管路12形成稳定的共振。
133.可以理解地,当压缩机当前处于冰箱开门阶段时,也可以通过检测压缩机管路的振动频率来实现对刚度可调单元的刚度调整。
134.具体地,在所述若所述压缩机当前处于冰箱开门的阶段,向所述刚度可调单元发送刚度减小信号之后,所述步骤s132,也即在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号,具体为:
135.在向所述刚度可调单元发送刚度减小信号之后,实时判断所述振动频率的大小变化;
136.若当前时刻所述振动频率大于上一时刻的振动频率,则继续向所述刚度可调单元发送所述刚度减小信号;
137.若当前时刻所述振动频率小于上一时刻的振动频率,则向所述刚度可调单元发送刚度增大信号;
138.若当前时刻所述振动频率维持不变,停止向所述刚度可调单元发送刚度调整信号。
139.采用本发明实施例的技术手段,当压缩机处于不同的工作状态时,能够根据压缩机的不同工作状态,针对性地实现对刚度可调单元的刚度调整,以调整压缩机管路上设置的振动调节系统的固有频率,从而使得振动调节系统的固有频率与压缩机管路的振动频率相近,以使振动调节系统与压缩机管路产生共振,吸收压缩机管路的振动能量,进而有效降低了压缩机在不同的工作状态下的振动和噪声,为用户提供了良好的使用体验。
140.参见图10,是本发明实施例提供的一种压缩机的振动调节方法的流程示意图。本发明实施例还提供了一种压缩机的振动调节方法,应用于冰箱,且所述冰箱包括:
141.压缩机以及与其连接的压缩机管路;
142.振动调节系统,包括质量单元和刚度可调单元;所述质量单元和所述刚度可调单元层叠设置,并固定连接于所述压缩机管路的至少一侧;
143.振动传感器,用于检测所述压缩机管路的振动频率;
144.位移传感器,用于检测所述质量单元的位移;
145.所述压缩机的振动调节方法包括步骤s21至s23:
146.s21、冰箱上电后,获取所述压缩机当前的工作状态;
147.s22、实时获取所述压缩机管路的振动频率和/或所述质量单元的位移;
148.s23、根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,以使所述振动调节系统的固有频率等于或趋近于所述振动频率。
149.采用本发明实施例的技术手段,通过在压缩机管路上设置振动调节系统,控制振动调节系统中的刚度可调单元的刚度大小来产生一定的固有频率,从而与压缩机管路产生共振,吸收压缩机管路的振动能量,进而有效降低了压缩机在不同的工作状态下的振动和噪声,相比于现有技术中采用橡胶减震块来缓冲压缩机管路的振动能量,本发明实施例的技术手段能够更加有效地减少压缩机管路的振动,减少压缩机振动所产生的噪声,极大地提高了用户的使用体验。
150.作为优选的实施方式,步骤s23,也即所述根据所述压缩机当前的工作状态,以及所述振动频率和/或所述位移的变化,调节所述刚度可调单元的刚度,具体包括步骤s231和s232:
151.s231、根据所述压缩机当前的工作状态,向所述刚度可调单元发送预设的刚度调
整信号;所述刚度调整信号用于触发所述刚度可调单元按照所述刚度调整信号,以预设的刚度调整步长和刚度调整周期调整自身的刚度;所述刚度调整信号为刚度增大信号或刚度减小信号;
152.s232、在向所述刚度可调单元发送预设的刚度调整信号之后,根据所述振动频率和/或所述位移的变化,调节所述刚度调整信号;其中,调节所述刚度调整信号的方式为:保持所述刚度调整信号不变、改变所述调整信号或停止发送刚度调节信号。
153.优选地,所述压缩机的工作状态包括:压缩机处于刚启动运行阶段、压缩机处于刚停止运行阶段、压缩机处于运行转速调整阶段和压缩机处于冰箱开门的阶段。
154.需要说明的是,本发明实施例提供的一种压缩机的振动调节方法与上述实施例的一种冰箱的控制器所执行的所有流程步骤相同,两者的工作原理和有益效果一一对应,因而不再赘述。
155.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read-onlymemory,rom)或随机存储记忆体(randomaccessmemory,ram)等。
156.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。