1.本发明属于红外小目标检测处理技术领域,尤其涉及一种基于检出点时空密度判别的密集杂波抑制方法。
背景技术:
2.相机固定指向条件下获得的红外背景图像具有较好的时序不变性,可利用时域滤波类算法进行背景估计。通过对当前帧图像与背景估计的残差图进行阈值分割得到目标检出点,达到抑制背景、进而提取运动目标的目的。常见的时域滤波类背景估计算法有混合高斯建模法、vibe算法等,在机场空域监控、空中无人机探测发现等领域应用广泛。
3.但是,实际应用中,太阳光照射的云层及云层反射可能存在短时高强度密集杂波现象,导致背景图像的时序不变性遭到破坏,时域滤波类算法的背景抑制性能下降,残差图中存在较强的密集杂波,导致虚警增加,极大地影响了红外小目标检测性能。
4.为了解决这个问题,需要从密集杂波的特性入手,形成杂波判据。密集杂波点在时空域上表现出密集分布的特征,与红外小目标检出点的稀疏分布存在明显差别,可作为区分目标与密集杂波的依据,最终实现密集杂波抑制以及低虚警小目标检测。
技术实现要素:
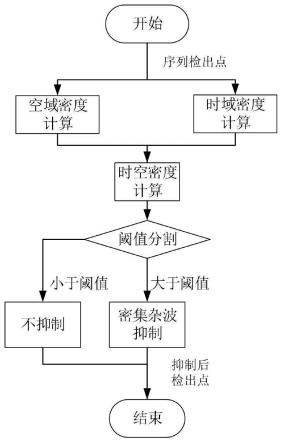
5.为了克服现有方法对密集杂波抑制的不足,在通过时域滤波算法得到检出点的基础上,本发明提出了一种基于检出点时空密度判别的密集杂波抑制方法。本方法首先设计了基于空间距离加权的检出点空域密度计算方法,其次设计了基于时空管道模型的检出点时域密度计算方法,使用以上方法对检出点进行空域密度、时域密度计算,最终构建了融合空域密度与时域密度的检出点时空密度图,以此为判别依据进行密集杂波的抑制。
6.为实现上述目的,本发明提供了一种基于检出点时空密度判别的密集杂波抑制方法,包括如下步骤:
7.s1.基于时域滤波算法,获得检出点;
8.s2.基于空间距离加权的方法,计算检出点空域密度;
9.s3.基于时空管道模型,计算检出点时域密度;
10.s4.基于所述检出点空域密度和所述检出点时域密度,构建检出点时空密度图;
11.s5.基于所述检出点时空密度图,完成对密集杂波的抑制。
12.优选的,所述s1中,在获得所述检出点的过程中,基于时域滤波算法,进行背景抑制,并对残差图进行阈值分割,得到第m帧图像的所有检出点。
13.优选的,所述s2中,计算所述检出点空域密度的过程中,对所有检出点逐点计算空域密度,表征每个检出点周围检出点的空间密集程度。
14.优选的,所述第m帧图像的第i个检出点空域密度计算公式为:
15.[0016][0017]
其中:表示第m帧中第i点的空域密度,i,n表示检出点序号,i,n∈[1,nm],为第i点与第n点的空域密度因子,为第m帧图像第i个检出点的坐标,为第n点的坐标;db为空域密度基数,需要人为设定;d
t
为距离阈值,nm为第m帧图像中所有检出点的数量。
[0018]
优选的,所述s3中,计算所述检出点时域密度的过程中,针对序列图像中每帧的检出点,基于预定大小的时空管道对所述检出点时域密度进行迭代计算。
[0019]
优选的,所述s3中,计算所述检出点时域密度的方法包括:
[0020]
s3.1:针对第m帧,计算下式:
[0021]
[q,rem]=f(m,c)
[0022]
式中f为函数,其功能为计算帧数m除以c得到商q及余数rem,其中c表示时域密度的计算周期,m、c、q、rem都为整数;
[0023]
s3.2:随着帧数的逐渐递增,当帧数m满足m=[c
·
q,c
·
q 1,
…
,c
·
q c-1]时,属于一个计算周期,帧数为c帧,对应的rem=[0,1,2,
…
,c-1],以下在此计算周期内描述检出点时域密度的计算过程:
[0024]
当m=c
·
q时,为周期第1帧,令所述第1帧所有检出点的时域密度初始值设为1,即:
[0025][0026]
式中表示第i点的时域密度初始值,nm为第m帧图像中所有检出点的数量;
[0027]
s3.3:当m=c
·
q 1至m=c
·
q c-1时,可根据周期内历史帧数据和当前帧数据进行检出点时域密度的迭代累加计算。
[0028]
优选的,所述第m帧图像的第i个检出点时域密度计算公式为:
[0029][0030][0031]
其中:表示第m帧图像第i个检出点的时域密度,j表示第m-1帧图像中检出点的序号,是第m-1帧图像第j个检出点的时域密度,是第m帧图像第i个检出点与第m-1帧图像第j个检出点的时空管道判断结果,为第m帧图像第i个检出点的坐标,为上一帧第j个检出点的坐标,l为时空管道半边长的大小,需要人为设定。
[0032]
优选的,所述s4中,构建所述检出点时空密度图的过程中,为了更好的表征检出点的密集程度,融合了所述检出点空域密度和所述检出点时域密度,进行密集杂波时空域密
度的计算。
[0033]
优选的,融合计算公式包括:
[0034][0035]
其中:p
im
为第m帧图像第i个检出点的时空密度,ω1为空域密度权重,ω2为时域密度权重,是第m帧第i点的空域密度,表示第m帧的时域密度,sdr是空域密度参考值,tdr是时域密度参考值,需要人为设定,rem是周期内帧序号。
[0036]
优选的,所述s5中,基于所述检出点时空密度图,完成对密集杂波的抑制的方法包括:
[0037]
对所述检出点时空密度图进行阈值分割,大于阈值的检出点为密集杂波点,小于阈值的检出点为目标。
[0038]
与现有技术相比,本发明具有如下优点和技术效果:
[0039]
(1)本发明以时域滤波得到的检出点为基础,提出了一种基于检出点时空密度的密集杂波抑制的技术方案,利用检出点的空域密度、时域密度加权融合计算检出点的时空密度,从而进行密集杂波的抑制,降低红外小目标检测系统的虚警。
[0040]
(2)本发明设计了一种基于空间距离加权的检出点空域密度的计算方法,该方法利用单帧检出点作为输入,计算检出点与其周围检出点的距离,按照距离越远空域密度因子越小的原则进行密度计算,间接表征点的密集程度。
[0041]
(3)本发明设计了一种基于时空管道的检出点时域密度周期迭代计算的方法,该方法通过时域多帧检出点迭代计算检出点在时空管道中的密度,该密度有效地表征检出点在时域分布上的密集程度,作为密集杂波的重要表征。
[0042]
(4)本发明设计了一种融合空域密度、时域密度加权的检出点时空密度计算模型,对时空密度进行阈值分割,大于阈值的检出点认为是密集杂波,小于阈值的检出点则认为是疑似目标,能有效抑制密集杂波、保留目标信息。
附图说明
[0043]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0044]
图1为本发明实施例的一种基于检出点时空密度判别的密集杂波抑制方法流程示意图;
[0045]
图2为本发明实施例的检出点的空域密度计算示意图;
[0046]
图3为本发明实施例的检出点的时域密度计算示意图;
[0047]
图4为本发明实施例的杂波抑制前后的效果对比示意图,(a)为输入原图,(b)为时空域滤波后检出点示意图,(c)本方法抑制后检出点二维图;
[0048]
图5为本发明实施例的算法中间结果图。
具体实施方式
[0049]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相
互组合。下面将参考附图并结合实施例来详细说明本发明。
[0050]
需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
[0051]
为了克服现有基于时域滤波的红外小目标检测算法对密集杂波抑制的不足,在通过时域滤波算法得到序列图像检出点的基础上,提出了一种基于检出点时空密度判别的密集杂波抑制方法。本方法首先设计了基于空间距离加权的检出点空域密度计算方法,其次设计了一种基于时空管道模型的检出点时域密度计算方法,使用以上方法对检出点进行空域密度、时域密度计算,最终构建了融合空域密度与时域密度的检出点时空密度表征,以此为依据进行密集杂波的抑制。
[0052]
本发明实施例中的测试样例来自于反无人机应用的红外小目标检测系统,测试图像共50帧,图像尺寸1200
×
900,图像位宽8位,在测试场景中同时存在目标与太阳强照射云层区域。使用vibe算法作为本实施例的时域滤波算法,生成的检出点作为本发明实施例测试的输入。
[0053]
参见图1,本发明实施例提出的一种基于检出点时空密度判别的密集杂波抑制方法,包括以下步骤:
[0054]
s1.基于时域滤波算法,获得检出点;
[0055]
在获得检出点的过程中,基于时域滤波算法,进行背景抑制,并对残差图进行阈值分割,得到第m帧图像的所有检出点。
[0056]
s2.基于空间距离加权的方法,计算检出点空域密度;
[0057]
针对第m帧图像得到的检出点,逐点计算空域密度,表征该检出点周围检出点的空间密集程度。第m帧图像中第i个检出点的空域密度计算公式具体如下:
[0058][0059][0060]
其中:表示第m帧中第i点的空域密度,i,n表示检出点序号,i,n∈[1,nm],为第i点与第n点的空域密度因子,为第m帧图像第i个检出点的坐标,为第n点的坐标,db为空域密度基数,d
t
为距离阈值,nm为第m帧图像中所有检出点的数量。
[0061]
本实施例中选择的是50帧图像,每帧图像检出点的坐标信息、数量信息是已知输入。db设置为0.5,d
t
设置为64。如图2,是检出点空域密度的计算示意图。
[0062]
s3.基于时空管道模型,计算检出点时域密度;
[0063]
在时域滤波算法获得序列图像检出点的基础上,基于一定大小的时空管道对检出点时域密度进行迭代计算。参见图3,时空管道中的空间是指在序列图像上以检出点为中心开固定大小的空间窗口,时空管道的时域是指时空管道的帧数。特别注意的是检出点时域密度的计算是具有周期性的。主要包括以下子步骤:
[0064]
s3.1:针对第m帧,计算下式:
[0065]
[q,rem]=f(m,c)
[0066]
式中f为函数,其功能为计算帧数m除以c得到商q及余数rem,其中c表示时域密度的计算周期,m、c、q、rem都为整数。
[0067]
s3.2:随着帧数的逐渐递增,当帧数m满足m=[c
·
q,c
·
q 1,
…
,c
·
q c-1]时,属于一个计算周期,帧数为c帧,对应的rem=[0,1,2,
…
,c-1],以下在此计算周期内描述检出点时域密度的计算过程。
[0068]
当m=c
·
q时,为周期第1帧,令该帧所有检出点的时域密度初始值设为1,即:
[0069][0070]
式中为第i点的时域密度初始值。
[0071]
s3.3:当m=c
·
q 1至m=c
·
q c-1时,可根据周期内历史帧数据和当前帧数据进行检出点时域密度的迭代累加计算,计算方式如下:
[0072][0073][0074]
其中:表示第m帧图像第i个检出点的时域密度,j表示第m-1帧图像中检出点的序号,是第m-1帧图像第j个检出点的时域密度,是第m帧图像第i个检出点与第m-1帧图像第j个检出点的时空管道判断结果,为第m帧图像第i个检出点的坐标,为上一帧第j个检出点的坐标,l为时空管道半边长的大小。本实施例中,时域密度的计算周期c为4,时空管道半边长l设置为35。如图3,是检出点时域密度的计算示意图。
[0075]
s4.基于检出点空域密度和检出点时域密度,构建检出点时空密度图;
[0076]
为了更好的表征检出点的密集程度,融合了空域密度、时域密度进行密集杂波时空密度的计算,融合计算公式如下所示:
[0077][0078]
其中:p
im
为第m帧图像第i个检出点的时空密度,ω1为空域密度权重,ω2为时域密度权重,是第m帧第i点的空域密度,表示第m帧第i点的时域密度,sdr是空域密度参考值,tdr是时域密度参考值,rem是周期内帧序号,计算见步骤s3。本实施例中,空域密度权重ω1设置为0.65,时域密度权重ω2设置为0.60,空域密度参考值sdr设置为20,时域密度参考值tdr设置为5。
[0079]
s5.基于检出点时空密度图,完成对密集杂波的抑制。
[0080]
通过以上方法可以得到当前第m帧所有检出点的时空密度,构成检出点时空密度图,对检出点时空密度图进行阈值分割。本实施例中时空密度阈值设置方式为固定阈值分割的方式,通过对测试数据的分析本实施例中固定阈值设定为0.5。大于阈值的检出点是密
集杂波,需进行抑制,小于阈值的检出点不进行抑制。
[0081]
以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。