技术特征:
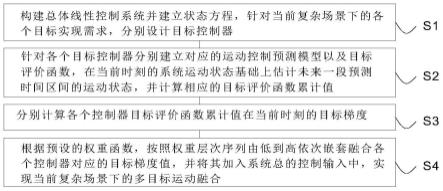
1.一种基于运动状态优化的多目标运动融合控制方法,其特征在于,包括:s1、构建总体线性控制系统并建立状态方程,针对当前复杂场景下的各个目标实现需求,分别设计目标控制器;s2、针对各个目标控制器分别建立对应的运动控制预测模型以及目标评价函数,在当前时刻的系统运动状态基础上估计未来一段预测时间区间的运动状态,并计算相应的目标评价函数累计值;s3、分别计算各个控制器目标评价函数累计值在当前时刻的目标梯度;s4、根据预设的权重函数,按照权重层次序列由低到高依次嵌套融合各个控制器对应的目标梯度值,并将其加入系统总的控制输入中,实现当前复杂场景下的多目标运动融合。2.如权利要求1所述的基于运动状态优化的多目标运动融合控制方法,其特征在于,所述s1包括:s11、构建总体线性控制系统并建立状态方程;y(t)=cx(t) du(t)其中,x(t)为系统t时刻的运动状态,为系统t时刻的运动速度,u(t)为t时刻的系统总的控制输入,y(t)为t时刻的系统总的控制输出,a、b、c、d为状态方程的计算参数;s12、针对当前复杂场景下的各个目标实现需求,分别设计目标控制器;u
i
(t)=f(y(t),r
i
(t))其中,u
i
(t)为控制器i的控制输入,是t时刻系统总的控制输出与期望控制目标的函数,r
i
(t)为控制目标t时刻的期望值。3.如权利要求2所述的基于运动状态优化的多目标运动融合控制方法,其特征在于,所述s2包括:s21、针对各个目标控制器分别建立对应的运动控制预测模型;s21、针对各个目标控制器分别建立对应的运动控制预测模型;其中,为预测区间内t时刻控制器i的预测运动状态,为预测区间内t时刻控制器i的预测运动速度,为预测区间内t时刻控制目标i的预测控制输出;s22、针对各个目标控制器分别建立目标评价函数,结合对应的所述运动控制预测模型,在当前时刻t0的系统运动状态基础上估计未来一段预测时间区间的运动状态,并计算相应的目标评价函数累计值;其中,j
i
(t0)为第i个控制器t0时刻的目标函数累计值,g
i
为第i个控制器预测区间t0到t0 t内单时刻点的目标评价函数值,t为预测时间区间。4.如权利要求3所述的基于运动状态优化的多目标运动融合控制方法,其特征在于,所述s3中采用如下公式计算所述目标梯度:
其中,g
i
(t0)是控制器i在t0时刻的目标评价函数累计值的目标梯度。5.如权利要求1所述的基于运动状态优化的多目标运动融合控制方法,其特征在于,所述s4中,根据预设的权重函数,按照权重层次序列由低到高依次嵌套融合各个控制器对应的目标梯度值,包括:s41、按目标的重要程度排序确定各个控制器的优先级;m=[m1,m2…
,m
l
…
,m
l
]其中,m是目标控制器的权重层次序列,满足n为总的目标控制数量,l为层次等级数,m
l
为第l个层次的目标控制器集合;s42、按权重层次序列由低到高依次嵌套计算融合后的目标梯度值;s42、按权重层次序列由低到高依次嵌套计算融合后的目标梯度值;其中,是关于梯度g的归一化函数,α表示分层参数,w
l
(t0)表示从1到l的嵌套计算结果。6.如权利要求1~5任一所述的基于运动状态优化的多目标运动融合控制方法,其特征在于,所述s4中,将所有控制器嵌套融合后的目标梯度值,并将其加入系统总的控制输入,表示为:其中,w
l
(t)为n个控制器嵌套融合后的目标梯度值,k为比例系数。7.一种基于运动状态优化的多目标运动融合控制系统,其特征在于,包括:设计模块,用于构建总体线性控制系统并建立状态方程,针对当前复杂场景下的各个目标实现需求,分别设计目标控制器;预测模块,用于针对各个目标控制器分别建立对应的运动控制预测模型以及目标评价函数,在当前时刻的系统运动状态基础上估计未来一段预测时间区间的运动状态,并计算相应的目标评价函数累计值;计算模块,用于分别计算各个控制器目标评价函数累计值在当前时刻的目标梯度;融合模块,用于根据预设的权重函数,按照权重层次序列由低到高依次嵌套融合各个控制器对应的目标梯度值,并将其加入系统总的控制输入中,实现当前复杂场景下的多目标运动融合。
8.一种存储介质,其特征在于,其存储有用于多目标运动融合的控制的计算机程序,其中,所述计算机程序使得计算机执行如权利要求1~6任一项所述的基于运动状态优化的多目标运动融合控制方法。9.一种电子设备,其特征在于,包括:一个或多个处理器;存储器;以及一个或多个程序,其中所述一个或多个程序被存储在所述存储器中,并且被配置成由所述一个或多个处理器执行,所述程序包括用于执行如权利要求1~6任一项所述的基于运动状态优化的多目标运动融合控制方法。
技术总结
本发明提供一种基于运动状态优化的多目标运动融合控制方法和系统,涉及多目标控制优化领域。包括:构建总体线性控制系统并建立状态方程,针对当前复杂场景下的各个目标实现需求,分别设计目标控制器;针对各个目标控制器建立对应的运动控制预测模型以及目标评价函数,在当前时刻的系统运动状态基础上估计未来一段预测时间区间的运动状态,并计算相应的目标评价函数累计值;计算各个控制器目标评价函数累计值在当前时刻的目标梯度;按照权重层次序列由低到高依次嵌套融合各个控制器对应的目标梯度值,并将其加入系统总的控制输入中。针对不同的控制目标需求,分别设立目标函数,通过融合梯度的方式,实现控制目标的运动融合,满足高实时性要求。满足高实时性要求。满足高实时性要求。
技术研发人员:李霄剑 肖夕林 杨善林 李玲 丁帅
受保护的技术使用者:合肥工业大学
技术研发日:2022.07.04
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。