1.本发明属于环氧磨石地坪技术领域,具体的说是一种环氧磨石地坪的铺设方法。
背景技术:
2.在进行环氧磨石地坪的铺设过程中,地坪的底部需要进行混凝土浇筑,混凝土的浇筑质量直接会影响环氧磨石地坪的好坏,当混凝土浇筑过程中,混凝土的内部会困有很多的气体,同时在很多拐角位置混凝土很容易未完全填满,特别是对于地坪要求较高的地面,混凝土的内部会搭建钢筋支架,大量的钢筋支架也会影响混凝土的填充,如果混凝土困气较多,混凝土浇筑完成后强度会较大减弱,同时地坪容易反水,影响环氧磨石地坪的使用寿命。
3.根据cn104746847a环氧磨石地坪的铺设方法,该发明选材优质、配方科学,能有效承受动载荷的磨损和冲击,有极强的附着力,不剥落,不龟裂,耐水、耐酸碱、耐油类、耐高温、抗老化,绝缘性能好,坚韧耐磨、抗压力、抗冲击、防静电,整体美观,无尘、无缝、无毒、便于清洗,经久耐用。本发明的环氧磨石地坪光泽度可达90度以上,莫氏硬度为8-9,可广泛应用与机场、宾馆、会议中心、展览馆等大型公共建筑物地面的装饰装修。
4.但是现有技术的振捣,均为人工控制插入混凝土的时间和速度,在进行混凝土振捣处理时,要求垂直插入,插入时要快,拔出时要慢,以免在混凝土中留下空隙,同时每次插入振捣的时间为20-30秒左右,并以混凝土不再显著下沉,不出现气泡,开始泛浆时为准,且振捣时间不宜过久,太久会出现砂与水泥浆分离,石子下沉,并在混凝土表面形成砂层,影响混凝土质量,振捣时不要碰到模板、钢筋和预埋件,在模板附近振捣时,应同时用木锤轻击模板,在钢筋密集处和模板边角处,应配合使用铁钎捣实,通过人工很难准确控制,进而使得振捣效果较差等问题。
5.鉴于此,本发明提供是一种环氧磨石地坪的铺设方法,通过该铺设方法中所使用的振捣,解决了上述技术问题。
技术实现要素:
6.为了弥补现有技术的振捣,均为人工控制插入混凝土的时间和速度,在进行混凝土振捣处理时,要求垂直插入,插入时要快,拔出时要慢,以免在混凝土中留下空隙,同时每次插入振捣的时间为20-30秒左右,并以混凝土不再显著下沉,不出现气泡,开始泛浆时为准,且振捣时间不宜过久,太久会出现砂与水泥浆分离,石子下沉,并在混凝土表面形成砂层,影响混凝土质量,振捣时不要碰到模板、钢筋和预埋件,在模板附近振捣时,应同时用木锤轻击模板,在钢筋密集处和模板边角处,应配合使用铁钎捣实,通过人工很难准确控制,进而使得振捣效果较差等问题,本发明提出的一种环氧磨石地坪的铺设方法。
7.本发明解决其技术问题所采用的技术方案是:本发明所述的一种环氧磨石地坪的铺设方法,该铺设方法包括以下步骤:s1:首先对地面进行充分打磨,使得地面平整,打磨完成后,对地面打磨产生的灰
尘进行充分的清理,以保证地面洁净;s2:设定基准,并对地面搭建支架,然后对地面进行浇筑,使得浇筑的混凝土地面与基准平齐,浇筑混凝土的过程中,同时需要工人使用振捣进行处理,待混凝土充分凝固后,再按照s1中的操作方法对混凝土地面进行打磨和清理,完成打磨清理后,刷底漆;s3:底漆干燥后,再将含有骨料的环氧树脂均匀的涂覆在地坪的表面,静置干燥后,先后进行粗磨和精磨,即完成环氧磨石地坪的铺设;其中s2中的振捣,包括壳体、振捣柱和电机;所述壳体的内部开设有工作腔;所述壳体的表面上下开设有通孔;所述通孔的内部上下滑动连接有振捣柱;所述壳体的顶面靠近壳体的侧面位置固连有扶手,且扶手的数量为二,且对称设置;所述振捣柱的表面固连有均匀布置的导板;所述导板的表面均开设有螺纹;所述壳体的内部于导板位置转动连接有齿环,且齿环的内表面开设有螺纹;所述壳体的内部靠近齿环位置转动连接有转动柱;所述转动柱的表面固连有齿轮,且齿轮与齿环之间啮合连接;所述壳体的内部于转动柱的底部位置固连有电机,且电机的输出轴与转动柱之间固定连接;工作时,在进行环氧磨石地坪的铺设过程中,地坪的底部需要进行混凝土浇筑,混凝土的浇筑质量直接会影响环氧磨石地坪的好坏,当混凝土浇筑过程中,混凝土的内部会困有很多的气体,同时在很多拐角位置混凝土很容易未完全填满,特别是对于地坪要求较高的地面,混凝土的内部会搭建钢筋支架,大量的钢筋支架也会影响混凝土的填充,如果混凝土困气较多,混凝土浇筑完成后强度会较大减弱,同时地坪容易反水,影响环氧磨石地坪的使用寿命,现有技术的振捣,均为人工控制插入混凝土的时间和速度,在进行混凝土振捣处理时,要求垂直插入,插入时要快,拔出时要慢,以免在混凝土中留下空隙,同时每次插入振捣的时间为20-30秒左右,并以混凝土不再显著下沉,不出现气泡,开始泛浆时为准,且振捣时间不宜过久,太久会出现砂与水泥浆分离,石子下沉,并在混凝土表面形成砂层,影响混凝土质量,振捣时不要碰到模板、钢筋和预埋件,在模板附近振捣时,应同时用木锤轻击模板,在钢筋密集处和模板边角处,应配合使用铁钎捣实,通过人工很难准确控制,进而使得振捣效果较差等问题,通过本发明的一种环氧磨石地坪的铺设方法,通过该铺设方法中所使用的振捣,当需要使用该振捣时,需要两个人同时紧握扶手共同操作,当将该振捣移动到指定位置后,通过控制启动电机,电机转动带动转动柱转动,转动柱会带动齿轮转动,通过齿轮会带动齿环转动,齿环转动会带动导板上下移动,通过导板实现了振捣柱的上下移动,通过设定好的系统,实现了振捣柱移动速度和时间的控制,当完成振捣后,电机会带动振捣柱向上运动导出,通过本发明有效的实现了振捣柱插入以及拔出混凝土速度的准确控制,同时能够控制振捣柱在混凝土内部停留的时间,保证了振捣时间的精确控制,相对于工人的主观操作,更为精确,进而浇筑混凝土的质量更高,减少了混凝土蜂窝的形成,进而降低了反水风险,提高环氧磨石地坪的使用寿命。
8.优选的,所述壳体底面靠近振捣柱位置固连有导环,且导环与振捣柱之间滑动连接;工作时,通过设置导环,当振捣柱上下移动时,振捣柱会与导环之间相对滑动,通过导环可以对振捣柱表面的粘附混凝土进行清理,避免混凝土导入壳体内部,影响壳体的内部电动元件以及传动元件的正常工作。
9.优选的,所述壳体的底面于振捣柱的周圈位置设有均匀布置的挡杆;所述挡杆与壳体的底面之间均固连有弹性垫;所述挡杆之间于振捣柱的底部位置均连有底杆;工作时,
通过设置挡杆,通过挡杆与壳体的底部连接,且连接位置设置弹性垫,挡杆底部设有底杆,由于增加了壳体,以及其他部件,使得振捣的总重量提高,工人持续搬起振捣,劳动强度较大,通过底杆和挡杆可以起到很到的支撑作用,同时挡杆可以避免振捣杆碰触到周边的模板、钢筋以及预埋件。
10.优选的,所述挡杆的表面均设有连接块;所述连接块之间共同连有固定板,且固定板与连接块之间均固连有缓垫;所述固定板的底面滑动连接有活动板;所述滑动板与固定板之间固连有均匀布置的弹簧;所述活动板的顶面于相邻的弹簧之间位置均固连有第一气囊;所述活动板相对于振捣杆一侧侧面开设有均匀布置的滑槽;所述滑槽的内部均滑动连接有滑块;所述滑块与对应滑槽的槽底之间均固连有第二气囊,且第二气囊与第一气囊之间均相互连通;工作时,通过设置固定板和活动板,当在模板附近振捣时,应同时用木锤轻击模板,由于工人此时正在控制振捣,无法进行轻击工作,需要增加人力,在模板附近时,通过控制模板挤压活动板,使得活动板滑动,活动板会挤压第一气囊和弹簧,使得第一气囊内部的气体进入到第二气囊的内部,第二气囊膨胀,第二气囊会带动对应滑块导出对应滑槽,使得滑块与振捣柱之间相互接触,振捣块震动会带动滑块以及活动板震动,通过活动板震动,实现了对模板的震动,实现了轻击模板的效果,同时设置的缓垫,可以避免挡杆受到较大震动,影响振捣效果。
11.优选的,所述扶手的内部均铰接有转动手杆;所述转动手杆与对应扶手之间均设有第一伸缩杆;所述壳体的底面靠近壳体的侧面位置固连有均匀布置的第二伸缩杆,且第二伸缩杆均与第一伸缩杆之间相互连通;所述固定板的顶面于第二伸缩杆位置均固连有导柱,且导柱均与对应第二伸缩杆的活塞杆之间相固连;所述第二伸缩杆与对应导柱之间固连有密封膜;工作时,通过工人控制转动手杆,转动手杆转动会压缩第一伸缩杆,使得第一伸缩杆内部的气体进入到第二伸缩杆的内部,第二伸缩杆伸长并会挤压对应导柱,导柱会带动固定板以及连接块上下运动,通过连接块会带动活动板上下移动,实现对活动板上下位置的调节,解决不同高度模板的震动需求。
12.优选的,所述挡杆的表面于活动板的底部位置均设有接块,连接块滑动到对应接块位置时,接块同时与连接块和活动板之间接触;工作时,通过设置接块,当周边无模板震动需求时,通过活动板会持续向下运动,最后活动板会挤压接块,通过接块,实现了活动板、连接块以及挡杆之间的接触连接,此时振捣柱震动时,可以直接带动挡杆震动,通过挡杆震动,有效的提高了振捣效果,满足高强度振捣的需求。
13.优选的,所述挡杆的表面于接块位置均开设有导槽,且接块均上下滑动连接于对应导槽的内部;所述接块与对应导槽的侧面之间均固连有第一环形囊;所述底杆与挡杆相对一侧侧面均开设有调节槽;所述调节槽的内部均滑动连接有连接杆;所述连接杆的表面固连有第二环形囊,且第二环形囊与第一环形囊之间相互连通;工作时,通过设置第一环形气囊和第二环形气囊,当活动板向下运动挤压接块时,会挤压接块,使得接块在对应导槽的内部上下滑动,同时接块会挤压对应第一环形气囊,使得第一环形气囊内部的气体进入到第二环形气囊的内部,第二环形气囊会带动连接杆滑动,实现挡杆与底杆之间的部分分离,此时震动挡杆,挡杆的震动效果更高,提高了振捣效率。
14.优选的,所述挡杆的底面开设有斜槽;所述斜槽的表面固连有弹性片;所述弹性片相对于对应斜槽的槽底一侧侧面均固连有震动球珠;工作时,通过设置弹性片,当挡杆震动
时,挡杆底部会发生剧烈的摆动,进而会使得连接杆与弹性片之间撞击,使得弹性片发生形变,一方面弹性片可以起到缓冲作用,减少对连接杆的损坏,另一方面弹性片形变会带动对应震动球柱撞击斜槽的槽底,实现对挡杆摆动的同时发生震动。
15.本发明的有益效果如下:1.本发明所述的一种环氧磨石地坪的铺设方法,通过该铺设方法中的振捣,通过设置壳体、振捣柱和电机,通过控制振捣柱在壳体的内部上下移动,有效的实现了振捣柱插入以及拔出混凝土速度的准确控制,同时能够控制振捣柱在混凝土内部停留的时间,保证了振捣时间的精确控制,相对于工人的主观操作,更为精确,进而浇筑混凝土的质量更高,减少了混凝土蜂窝的形成,进而降低了反水风险,提高环氧磨石地坪的使用寿命。
16.2.本发明所述的一种环氧磨石地坪的铺设方法,通过该铺设方法中的振捣,通过设置挡杆、固定板和活动板,当在模板附近振捣时,应同时用木锤轻击模板,由于工人此时正在控制振捣,无法进行轻击工作,需要增加人力,在模板附近时,通过控制模板挤压活动板,使得活动板滑动,活动板会挤压第一气囊和弹簧,使得第一气囊内部的气体进入到第二气囊的内部,第二气囊膨胀,第二气囊会带动对应滑块导出对应滑槽,使得滑块与振捣柱之间相互接触,振捣块震动会带动滑块以及活动板震动,通过活动板震动,实现了对模板的震动,实现了轻击模板的效果,同时设置的缓垫,可以避免挡杆受到较大震动,影响振捣效果。
附图说明
17.下面结合附图对本发明作进一步说明。
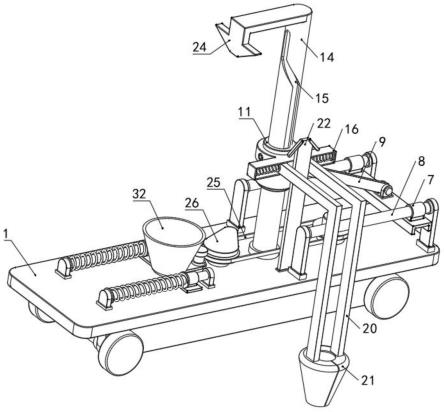
18.图1是本发明的铺设方法流程图;图2是本发明的立体图;图3是本发明的俯视图;图4是图3中a-a的截面视图;图5是图4中b处的局部放大视图;图6是图4中c处的局部放大视图;图中:壳体1、振捣柱2、电机3、扶手4、导板5、齿环6、转动柱7、齿轮8、导环9、挡杆10、弹性垫11、底杆12、连接块13、固定板14、缓垫15、活动板16、弹簧17、第一气囊18、滑块19、第二气囊20、转动手杆21、第一伸缩杆22、第二伸缩杆23、导柱24、密封膜25、接块26、第一环形囊27、连接杆28、第二环形囊29、弹性片30、震动球珠31。
具体实施方式
19.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
20.如图1至图6所示,本发明所述的一种环氧磨石地坪的铺设方法,该铺设方法包括以下步骤:s1:首先对地面进行充分打磨,使得地面平整,打磨完成后,对地面打磨产生的灰尘进行充分的清理,以保证地面洁净;s2:设定基准,并对地面搭建支架,然后对地面进行浇筑,使得浇筑的混凝土地面与基准平齐,浇筑混凝土的过程中,同时需要工人使用振捣进行处理,待混凝土充分凝固
后,再按照s1中的操作方法对混凝土地面进行打磨和清理,完成打磨清理后,刷底漆;s3:底漆干燥后,再将含有骨料的环氧树脂均匀的涂覆在地坪的表面,静置干燥后,先后进行粗磨和精磨,即完成环氧磨石地坪的铺设;其中s2中的振捣,包括壳体1、振捣柱2和电机3;所述壳体1的内部开设有工作腔;所述壳体1的表面上下开设有通孔;所述通孔的内部上下滑动连接有振捣柱2;所述壳体1的顶面靠近壳体1的侧面位置固连有扶手4,且扶手4的数量为二,且对称设置;所述振捣柱2的表面固连有均匀布置的导板5;所述导板5的表面均开设有螺纹;所述壳体1的内部于导板5位置转动连接有齿环6,且齿环6的内表面开设有螺纹;所述壳体1的内部靠近齿环6位置转动连接有转动柱7;所述转动柱7的表面固连有齿轮8,且齿轮8与齿环6之间啮合连接;所述壳体1的内部于转动柱7的底部位置固连有电机3,且电机3的输出轴与转动柱7之间固定连接;工作时,在进行环氧磨石地坪的铺设过程中,地坪的底部需要进行混凝土浇筑,混凝土的浇筑质量直接会影响环氧磨石地坪的好坏,当混凝土浇筑过程中,混凝土的内部会困有很多的气体,同时在很多拐角位置混凝土很容易未完全填满,特别是对于地坪要求较高的地面,混凝土的内部会搭建钢筋支架,大量的钢筋支架也会影响混凝土的填充,如果混凝土困气较多,混凝土浇筑完成后强度会较大减弱,同时地坪容易反水,影响环氧磨石地坪的使用寿命,现有技术的振捣,均为人工控制插入混凝土的时间和速度,在进行混凝土振捣处理时,要求垂直插入,插入时要快,拔出时要慢,以免在混凝土中留下空隙,同时每次插入振捣的时间为20-30秒左右,并以混凝土不再显著下沉,不出现气泡,开始泛浆时为准,且振捣时间不宜过久,太久会出现砂与水泥浆分离,石子下沉,并在混凝土表面形成砂层,影响混凝土质量,振捣时不要碰到模板、钢筋和预埋件,在模板附近振捣时,应同时用木锤轻击模板,在钢筋密集处和模板边角处,应配合使用铁钎捣实,通过人工很难准确控制,进而使得振捣效果较差等问题,通过本发明的一种环氧磨石地坪的铺设方法,通过该铺设方法中所使用的振捣,当需要使用该振捣时,需要两个人同时紧握扶手4共同操作,当将该振捣移动到指定位置后,通过控制启动电机3,电机3转动带动转动柱7转动,转动柱7会带动齿轮8转动,通过齿轮8会带动齿环6转动,齿环6转动会带动导板5上下移动,通过导板5实现了振捣柱2的上下移动,通过设定好的系统,实现了振捣柱2移动速度和时间的控制,当完成振捣后,电机3会带动振捣柱2向上运动导出,通过本发明有效的实现了振捣柱2插入以及拔出混凝土速度的准确控制,同时能够控制振捣柱2在混凝土内部停留的时间,保证了振捣时间的精确控制,相对于工人的主观操作,更为精确,进而浇筑混凝土的质量更高,减少了混凝土蜂窝的形成,进而降低了反水风险,提高环氧磨石地坪的使用寿命。
21.作为本发明的一种实施方式,所述壳体1底面靠近振捣柱2位置固连有导环9,且导环9与振捣柱2之间滑动连接;工作时,通过设置导环9,当振捣柱2上下移动时,振捣柱2会与导环9之间相对滑动,通过导环9可以对振捣柱2表面的粘附混凝土进行清理,避免混凝土导入壳体1内部,影响壳体1的内部电动元件以及传动元件的正常工作。
22.作为本发明的一种实施方式,所述壳体1的底面于振捣柱2的周圈位置设有均匀布置的挡杆10;所述挡杆10与壳体1的底面之间均固连有弹性垫11;所述挡杆10之间于振捣柱2的底部位置均连有底杆12;工作时,通过设置挡杆10,通过挡杆10与壳体1的底部连接,且连接位置设置弹性垫11,挡杆10底部设有底杆12,由于增加了壳体1,以及其他部件,使得振捣的总重量提高,工人持续搬起振捣,劳动强度较大,通过底杆12和挡杆10可以起到很到的
支撑作用,同时挡杆10可以避免振捣杆碰触到周边的模板、钢筋以及预埋件。
23.作为本发明的一种实施方式,所述挡杆10的表面均设有连接块13;所述连接块13之间共同连有固定板14,且固定板14与连接块13之间均固连有缓垫15;所述固定板14的底面滑动连接有活动板16;所述滑动板与固定板14之间固连有均匀布置的弹簧17;所述活动板16的顶面于相邻的弹簧17之间位置均固连有第一气囊18;所述活动板16相对于振捣杆一侧侧面开设有均匀布置的滑槽;所述滑槽的内部均滑动连接有滑块19;所述滑块19与对应滑槽的槽底之间均固连有第二气囊20,且第二气囊20与第一气囊18之间均相互连通;工作时,通过设置固定板14和活动板16,当在模板附近振捣时,应同时用木锤轻击模板,由于工人此时正在控制振捣,无法进行轻击工作,需要增加人力,在模板附近时,通过控制模板挤压活动板16,使得活动板16滑动,活动板16会挤压第一气囊18和弹簧17,使得第一气囊18内部的气体进入到第二气囊20的内部,第二气囊20膨胀,第二气囊20会带动对应滑块19导出对应滑槽,使得滑块19与振捣柱2之间相互接触,振捣块震动会带动滑块19以及活动板16震动,通过活动板16震动,实现了对模板的震动,实现了轻击模板的效果,同时设置的缓垫15,可以避免挡杆10受到较大震动,影响振捣效果。
24.作为本发明的一种实施方式,所述扶手4的内部均铰接有转动手杆21;所述转动手杆21与对应扶手4之间均设有第一伸缩杆22;所述壳体1的底面靠近壳体1的侧面位置固连有均匀布置的第二伸缩杆23,且第二伸缩杆23均与第一伸缩杆22之间相互连通;所述固定板14的顶面于第二伸缩杆23位置均固连有导柱24,且导柱24均与对应第二伸缩杆23的活塞杆之间相固连;所述第二伸缩杆23与对应导柱24之间固连有密封膜25;工作时,通过工人控制转动手杆21,转动手杆21转动会压缩第一伸缩杆22,使得第一伸缩杆22内部的气体进入到第二伸缩杆23的内部,第二伸缩杆23伸长并会挤压对应导柱24,导柱24会带动固定板14以及连接块13上下运动,通过连接块13会带动活动板16上下移动,实现对活动板16上下位置的调节,解决不同高度模板的震动需求。
25.作为本发明的一种实施方式,所述挡杆10的表面于活动板16的底部位置均设有接块26,连接块13滑动到对应接块26位置时,接块26同时与连接块13和活动板16之间接触;工作时,通过设置接块26,当周边无模板震动需求时,通过活动板16会持续向下运动,最后活动板16会挤压接块26,通过接块26,实现了活动板16、连接块13以及挡杆10之间的接触连接,此时振捣柱2震动时,可以直接带动挡杆10震动,通过挡杆10震动,有效的提高了振捣效果,满足高强度振捣的需求。
26.作为本发明的一种实施方式,所述挡杆10的表面于接块26位置均开设有导槽,且接块26均上下滑动连接于对应导槽的内部;所述接块26与对应导槽的侧面之间均固连有第一环形囊27;所述底杆12与挡杆10相对一侧侧面均开设有调节槽;所述调节槽的内部均滑动连接有连接杆28;所述连接杆28的表面固连有第二环形囊29,且第二环形囊29与第一环形囊27之间相互连通;工作时,通过设置第一环形气囊和第二环形气囊,当活动板16向下运动挤压接块26时,会挤压接块26,使得接块26在对应导槽的内部上下滑动,同时接块26会挤压对应第一环形气囊,使得第一环形气囊内部的气体进入到第二环形气囊的内部,第二环形气囊会带动连接杆28滑动,实现挡杆10与底杆12之间的部分分离,此时震动挡杆10,挡杆10的震动效果更高,提高了振捣效率。
27.作为本发明的一种实施方式,所述挡杆10的底面开设有斜槽;所述斜槽的表面固
连有弹性片30;所述弹性片30相对于对应斜槽的槽底一侧侧面均固连有震动球珠31;工作时,通过设置弹性片30,当挡杆10震动时,挡杆10底部会发生剧烈的摆动,进而会使得连接杆28与弹性片30之间撞击,使得弹性片30发生形变,一方面弹性片30可以起到缓冲作用,减少对连接杆28的损坏,另一方面弹性片30形变会带动对应震动球柱撞击斜槽的槽底,实现对挡杆10摆动的同时发生震动。
28.具体工作流程如下:工作时,当需要使用该振捣时,需要两个人同时紧握扶手4共同操作,当将该振捣移动到指定位置后,通过控制启动电机3,电机3转动带动转动柱7转动,转动柱7会带动齿轮8转动,通过齿轮8会带动齿环6转动,齿环6转动会带动导板5上下移动,通过导板5实现了振捣柱2的上下移动,通过设定好的系统,实现了振捣柱2移动速度和时间的控制,当完成振捣后,电机3会带动振捣柱2向上运动导出;通过设置导环9,当振捣柱2上下移动时,振捣柱2会与导环9之间相对滑动,通过导环9可以对振捣柱2表面的粘附混凝土进行清理,避免混凝土导入壳体1内部,影响壳体1的内部电动元件以及传动元件的正常工作;通过设置挡杆10,通过挡杆10与壳体1的底部连接,且连接位置设置弹性垫11,挡杆10底部设有底杆12,由于增加了壳体1,以及其他部件,使得振捣的总重量提高,工人持续搬起振捣,劳动强度较大,通过底杆12和挡杆10可以起到很到的支撑作用,同时挡杆10可以避免振捣杆碰触到周边的模板、钢筋以及预埋件;通过设置固定板14和活动板16,当在模板附近振捣时,应同时用木锤轻击模板,由于工人此时正在控制振捣,无法进行轻击工作,需要增加人力,在模板附近时,通过控制模板挤压活动板16,使得活动板16滑动,活动板16会挤压第一气囊18和弹簧17,使得第一气囊18内部的气体进入到第二气囊20的内部,第二气囊20膨胀,第二气囊20会带动对应滑块19导出对应滑槽,使得滑块19与振捣柱2之间相互接触,振捣块震动会带动滑块19以及活动板16震动,通过活动板16震动,实现了对模板的震动,实现了轻击模板的效果,同时设置的缓垫15,可以避免挡杆10受到较大震动,影响振捣效果;通过工人控制转动手杆21,转动手杆21转动会压缩第一伸缩杆22,使得第一伸缩杆22内部的气体进入到第二伸缩杆23的内部,第二伸缩杆23伸长并会挤压对应导柱24,导柱24会带动固定板14以及连接块13上下运动,通过连接块13会带动活动板16上下移动,实现对活动板16上下位置的调节,解决不同高度模板的震动需求;通过设置接块26,当周边无模板震动需求时,通过活动板16会持续向下运动,最后活动板16会挤压接块26,通过接块26,实现了活动板16、连接块13以及挡杆10之间的接触连接,此时振捣柱2震动时,可以直接带动挡杆10震动,通过挡杆10震动,有效的提高了振捣效果,满足高强度振捣的需求;通过设置第一环形气囊和第二环形气囊,当活动板16向下运动挤压接块26时,会挤压接块26,使得接块26在对应导槽的内部上下滑动,同时接块26会挤压对应第一环形气囊,使得第一环形气囊内部的气体进入到第二环形气囊的内部,第二环形气囊会带动连接杆28滑动,实现挡杆10与底杆12之间的部分分离,此时震动挡杆10,挡杆10的震动效果更高,提高了振捣效率;通过设置弹性片30,当挡杆10震动时,挡杆10底部会发生剧烈的摆动,进而会使得连接杆28与弹性片30之间撞击,使得弹性片30发生形变,一方面弹性片30可以起到缓冲作用,减少对连接杆28的损坏,另一方面弹性片30形变会带动对应震动球柱撞击斜槽的槽底,实现对挡杆10摆动的同时发生震动。
29.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原
理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。