技术特征:
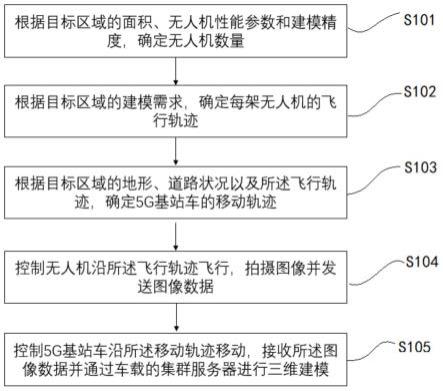
1.一种基于5g机动组网的无人机群监测方法,其特征在于,包括以下步骤:根据目标区域的面积、无人机性能参数和建模精度,确定无人机数量;根据目标区域的建模需求,确定每架无人机的飞行轨迹;根据目标区域的地形、道路状况以及所述飞行轨迹,确定5g基站车的移动轨迹;控制无人机沿所述飞行轨迹飞行,拍摄图像并发送图像数据;控制5g基站车沿所述移动轨迹移动,接收所述图像数据并通过车载的集群服务器进行三维建模。2.根据权利要求1所述的基于5g机动组网的无人机群监测方法,其特征在于,所述根据目标区域的面积、无人机性能参数和建模精度,确定无人机数量的计算公式如下:其中,s为目标区域面积,t为无人机续航时间,v为无人机飞行速度,x为单机摄像头个数,p为三维建模精度,ε、α、β和γ分别为调整系数。3.根据权利要求1所述的基于5g机动组网的无人机群监测方法,其特征在于,所述根据目标区域的建模需求,确定每架无人机的飞行轨迹包括如下步骤:选取拍摄点的空间三维坐标m
k
=(x
k
,y
k
,z
k
),形成拍摄点坐标集合通过优化模型,将不同拍摄点分配给不同的无人机;其中,为集合m中的拍摄点组成的拍摄轨迹,c为n架无人机中最迟完成拍摄任务的无人机所消耗的时间。4.根据权利要求3所述的基于5g机动组网的无人机群监测方法,其特征在于,所述根据目标区域的地形、道路状况以及所述飞行轨迹,确定5g基站车的移动轨迹包括以下步骤:对目标区域可供5g基站车行驶的道路进行网格划分,对每个网格进行编号,形成位置集合l={l1,l2,...,l
j
,...,l
j
};每间隔预定时间,获取每架无人机的位置坐标,计算每架无人机到位置l
j
的通信速率;通过强化学习算法计算5g基站车的行动轨迹。5.根据权利要求4所述的基于5g机动组网的无人机群监测方法,其特征在于,所述网格的尺寸为20m*20m。6.根据权利要求4所述的基于5g机动组网的无人机群监测方法,其特征在于,所述通信速率计算公式为:d
nj
=2*b*log(1 snr
nj
)其中,snr
nj
为飞机n到网格化的位置l
j
的信噪比,d
nj
为通信速率,b为传输带宽。7.根据权利要求4所述的基于5g机动组网的无人机群监测方法,其特征在于,所述强化学习算法的回报函数计算值为:在整个机群巡查过程中,任意无人机任意时刻与5g基站车的通信速率之和最大;所述强化学习算法的约束条件为:任意时刻任意无人机与5g基站车之间的通信速率不低于2mbit/s。
8.一种基于5g机动组网的无人机群监测系统,其特征在于,包括:确定模块,所述确定模块根据目标区域的面积、无人机性能参数和建模精度,确定无人机数量;根据目标区域的建模需求,确定每架无人机的飞行轨迹;根据目标区域的地形、道路状况以及所述飞行轨迹,确定5g基站车的移动轨迹;第一执行模块,所述第一执行模块控制无人机沿所述飞行轨迹飞行,控制无人机拍摄图像并发送图像数据;第二执行模块,所述第二执行模块控制5g基站车沿所述移动轨迹移动,控制5g基站车接收所述图像数据并通过车载的集群服务器进行三维建模。9.一种电子设备,其特征在于,包括:处理器、通信接口、通信总线、存储器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的基于5g机动组网的无人机群监测方法。10.一种可读存储介质,其特征在于,所述可读存储介质上存储有程序,所述程序被处理器执行时实现如权利要求1至7中任一项所述的基于5g机动组网的无人机群监测方法。
技术总结
本发明提供一种基于5G机动组网的无人机群监测方法、系统和电子设备,监测方法包括以下步骤:根据目标区域的面积、无人机性能参数和建模精度,确定无人机数量;根据目标区域的建模需求,确定每架无人机的飞行轨迹;根据目标区域的地形、道路状况以及飞行轨迹,确定5G基站车的移动轨迹;控制无人机沿飞行轨迹飞行,拍摄图像并发送图像数据;控制5G基站车沿移动轨迹移动,接收图像数据并通过车载的集群服务器进行三维建模。根据本发明的基于5G机动组网的无人机群监测方法,摆脱了传统方式需要线下汇总数据的局限,大大提高了巡查效率和三维建模效率,适用于多种场景,实用性强,经济价值高。值高。值高。
技术研发人员:姚昌华 窦景立
受保护的技术使用者:江苏大势航空科技有限公司
技术研发日:2022.06.27
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。