1.本实用新型涉及航迹追踪技术领域,尤其涉及一种航迹跟踪装置和航迹跟踪系统。
背景技术:
2.北斗卫星200导航系统是中国自主建设运行的全球卫星导航系统,为全球用户提供全天候,全天时,高精度的定位,导航和授时服务,对建立畅通,高效,安全,绿色的现代交通运输体系具有十分重要的意义。北斗卫星导航系统可以应用于以下几个方面:陆地应用,如车辆自主导航,车辆跟踪监控,车辆智能信息系统,车联网应用,铁路运营监控等;航海应用,如远洋运输,内河航运,船舶停泊与入坞等;航空应用,如航路导航,机场场面监控,精密进近等。随着交通的发展,高精度应用需求加速释放。
3.然而,现有的航空飞行器定位装置,往往采用gps进行定位,目前还没有结合北斗卫星导航系统中的北斗短报文通信功能进行信息传输的航迹定位跟踪设备。
技术实现要素:
4.本实用新型实施例提供了一种航迹跟踪装置和航迹跟踪系统,以实现对飞行器的实时航迹定位跟踪。
5.第一方面,本实用新型实施例提供了一种航迹跟踪装置,包括电源管理单元,用于控制射频通信单元和九轴惯性导航单元的单片机单元,用于获取位置信息和进行短报文通信的射频通信单元和用于获取航姿信息的九轴惯性导航单元;所述电源管理单元分别连接所述单片机单元、所述射频通信单元和所述九轴惯性导航单元;所述单片机单元分别连接所述射频通信单元和所述九轴惯性导航单元;所述航迹跟踪装置通过所述射频通信单元和所述九轴惯性导航单元获取飞行器航迹信息,所述航迹信息包括所述位置信息和所述航姿信息,并通过所述射频通信单元以北斗短报文的形式将实时航迹信息发送至地面控制中心。
6.基于第一方面,在一些实施例中,所述电源管理单元用于将外部输入电压转换为供电电压,对所述单片机单元、所述射频通信单元和所述九轴惯性导航单元进行供电。
7.基于第一方面,在一些实施例中,所述射频通信单元包括第四芯片、第七电容和第八电容;所述第四芯片的第一接口至第五接口相互连接,所述第四芯片的第六接口至第九接口相互连接,所述第四芯片的第十接口、第十一接口、第十二接口、第十三接口、第十六接口、第二十一接口和第二十二接口接地,所述第四芯片的第十四接口和第十五接口悬空;所述第四芯片的第一接口连接vcc-12v电源,所述第四芯片的第六接口连接vcc-5v电源;所述第七电容的第一端连接所述第四芯片的第一接口,所述第七电容的第二端接地,所述第八电容的第一端连接第四芯片的第六接口,所述第八电容的第二端接地;所述第四芯片的第十七接口和第十九接口通过串口连接所述单片机单元,所述第四芯片的第十七接口为rnss_rx信号端,所述第四芯片的第十九接口为rnss_tx信号端;所述第四芯片的第十八接
口和第二十接口通过串口连接所述单片机单元,所述第四芯片的第十八接口为rdss_rx信号端,所述第四芯片的第二十接口为rdss_tx信号端;所述第四芯片的第二十三接口、第二十四接口和第二十五接口连接sim卡电路,分别为sim-data信号端、sim-nrst信号端和sim-sclk信号端。
8.基于第一方面,在一些实施例中,所述九轴惯性导航单元包括第五芯片、第九电容和第十电容、第五电阻和第六电阻;所述第五芯片的第一接口连接vcc-3.3v电源,所述第五芯片的第二接口接地,所述第五芯片的第五接口至第七接口和第九接口悬空,所述第五芯片的第八接口连接第九芯片的gpio口;所述第五芯片的第三接口通过第五电阻连接所述单片机单元,所述第五芯片的第四接口通过第六电阻连接所述单片机单元,所述第五芯片的第三接口为comp_tx信号端,所述第五芯片的第四接口为comp_rx信号端;所述第九电容的第一端连接所述第五芯片的第一接口,所述第九电容的第二端接地,所述第十电容的第一端连接所述第五芯片的第一接口,所述第十电容的第二端接地。
9.基于第一方面,在一些实施例中,所述航迹跟踪装置还包括外部控制设备;所述外部控制设备包括用于存储数据的sd卡电路、用于连接外部设备进行信息传输的mini usb电路、用于连接北斗通信卡进行通信的sim卡电路、用于获取电池电量的电池电量采样电路和用于指示所述航迹跟踪装置工作状态的led指示灯;所述单片机单元分别连接所述sd卡电路、所述mini usb电路、所述电池电量采样电路和所述led指示灯,所述射频通信单元连接所述sim卡电路。
10.基于第一方面,在一些实施例中,所述sd卡电路包括第六芯片、第七电阻至第十八电阻和第十一电容;所述第六芯片的第一接口、第二接口、第三接口、第七接口和第八接口分别通过第十四电阻、第十五电阻、第十六电阻、第十七电阻和第十八电阻连接vcc-3.3v电源;所述第六芯片的第六接口接地;所述第六芯片的第一接口、第二接口、第三接口、第五接口、第七接口和第八接口分别通过第七电阻至第十三电阻连接第九芯片的第六十五接口、第六十六接口、第七十八接口、第七十九接口、第八十接口和第八十三接口;第十一电容的第一端连接第十电阻,第十一电容的第二端接地。
11.基于第一方面,在一些实施例中,所述mini usb电路包括所述第七芯片、第十九电阻至第二十二电阻、第十二电容和第十三电容;所述第七芯片的第一接口通过第十九电阻连接vcc-5v电源,所述第七芯片的第二接口通过第二十电阻连接第九芯片的第七十接口,所述第七芯片的第三接口通过第二十一电阻连接第九芯片的第七十一接口,所述第七芯片的第二接口为usb_d 信号端,所述第七芯片的第三接口为usb_d-信号端,所述第七芯片的第四接口和第六接口至第十一接口悬空,所述第七芯片的第五接口接地;第二十二电阻的第一端连接所述第七芯片的第三接口,第二十二电阻的第二端连接vcc-3.3v电源;第十二电容的第一端连接所述第七芯片的第一接口,第十二电容的第二端接地;第十三电容的第一端连接所述第七芯片的第三接口,第十三电容的第二端接地。
12.基于第一方面,在一些实施例中,所述航迹跟踪装置包括外接电源模式和内部电池供电模式,当所述航迹跟踪装置处于所述内部电池供电模式时,所述单片机单元连接电池电量采样电路,通过led指示灯显示内部电池电量。
13.基于第一方面,在一些实施例中,所述单片机单元连接所述led指示灯,所述led指示灯用于指示当前定位状态,短报文通信发射状态,存储容量状态和内部电池电量状态。
14.第二方面,本实用新型实施例提供了一种航迹跟踪系统,其特征在于,包括如上述第一方面任一项所述的航迹跟踪装置,北斗卫星和地面控制中心;所述航迹跟踪装置能够获取飞行器的航迹信息,并将所述航迹信息通过所述北斗卫星的短报文通信发送至地面控制中心;所述航迹信息包括位置信息和航姿信息,其中所述位置信息通过所述北斗卫星信号获取,所述航姿信息通过所述航迹跟踪装置获取;所述地面控制中心能够接收和分析所述航迹信息,并根据所述航迹信息对飞行器进行监控和追踪。
15.本实用新型实施例中,利用北斗卫星进行定位和短报文通信,将飞行器的实时航迹信息发送给地面控制中心,覆盖范围大,通信频率快,定位精度高。控制中心接收飞行器的航迹信息,可根据航迹信息实时对飞行器进行监控和追踪。
附图说明
16.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
17.图1是本实用新型实施例提供的应用场景示意图;
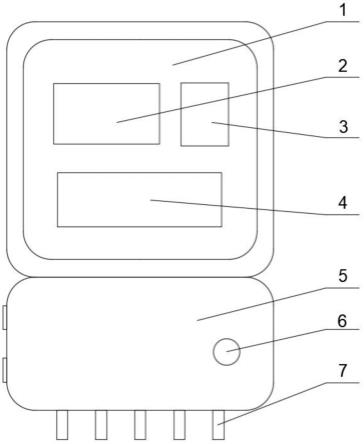
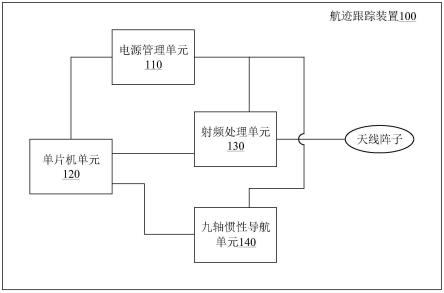
18.图2是本实用新型实施例提供的航迹跟踪装置结构示意图;
19.图3是本实用新型实施例提供的电源管理单元第一转换模块原理图;
20.图4是本实用新型实施例提供的电源管理单元第二转换模块原理图;
21.图5是本实用新型实施例提供的射频通信单元原理图;
22.图6是本实用新型实施例提供的九轴惯性导航单元原理图;
23.图7是本实用新型实施例提供的sd卡电路原理图;
24.图8是本实用新型实施例提供的mini usb电路原理图;
25.图9是本实用新型实施例提供的sim卡电路原理图;
26.图10是本实用新型实施例提供的电池电量采样电路原理图;
27.图11是本实用新型实施例提供的单片机单元原理图。
具体实施方式
28.为了使本技术领域的人员更好地理解本实用新型,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
29.本实用新型的说明书和权利要求书及上述附图中的术语“包括”以及其他任何变形,是指“包括但不限于”,意图在于覆盖不排他的包含,并不仅限于文中列举的示例。此外,术语“第一”和“第二”等是用于区别不同对象,而非用于描述特定顺序。
30.以下结合具体附图对本实用新型的实现进行详细的描述:
31.图1示出了本实用新型实施例提供的应用场景示意图。参见图1,上述应用场景可以包括航迹跟踪装置100、北斗卫星200和地面控制中心300。
32.所述航迹跟踪装置100能够获取飞行器的航迹信息,并将所述航迹信息通过所述北斗卫星200的短报文通信发送至地面控制中心300;
33.所述航迹信息包括位置信息和航姿信息,其中所述位置信息通过所述北斗卫星200信号获取,所述航姿信息通过所述航迹跟踪装置100获取;
34.所述地面控制中心300能够接收和分析所述航迹信息,并根据所述航迹信息对飞行器进行监控和追踪。
35.如图2所示,上述航迹跟踪装置100可以包括电源管理单元110、用于控制射频通信单元和九轴惯性导航单元的单片机单元120、用于获取位置信息和进行短报文通信的射频通信单元130和用于获取航姿信息的九轴惯性导航单元140;
36.所述电源管理单元110分别连接所述单片机单元120、所述射频通信单元130和所述九轴惯性导航单元140;所述单片机单元120分别连接所述射频通信单元130和所述九轴惯性导航单元140。
37.所述航迹跟踪装置100通过所述射频通信单元130和所述九轴惯性导航单元140获取飞行器航迹信息,所述航迹信息包括所述位置信息和所述航姿信息,并通过所述射频通信单元130以北斗短报文的形式将实时航迹信息发送至地面控制中心300。
38.所述电源管理单元110用于将外部输入电压转换为供电电压,对所述单片机单元120,所述射频通信单元130和所述九轴惯性导航单元140进行供电。
39.所述射频通信单元130具有如下功能:接收射频信号并对所述射频信号进行变频、采样和解调;通过所述射频信号计算飞行器位置信息;将所述位置信息上传给所述单片机单元120;接收所述单片机单元120发送的所述航迹信息;对所述航迹信息进行调制并以短报文形式进行发送。
40.所述九轴惯性导航单元140用于测量飞行器的航姿信息;所述航姿信息包括航空器的航向角、横滚角、俯仰角数据。
41.电源管理单元110包括第一转换模块和第二转换模块,如图3所示,第一转换模块包括第一芯片u1、第二芯片u2、第一电阻r1、第二电阻r2、第一电感l1、第一电容c1至第三电容c3。
42.第一芯片u1的第二接口22、第三接口33和第五接口55悬空,第一芯片u1的第六接口66接地,第一芯片u1的第七接口7连接第一电容c1的第一端,第一芯片u1的第一接口1连接第二电容c2的第一端,第一芯片u1的第八接口8连接第二电容c2的第二端,第一芯片u1的第四接口4连接第二电阻r2的第一端,第二芯片u2的第一接口1连接第二电容c2的第二端,第二芯片u2的第二接口2接地。
43.第一电c1容的第二端接地。第一电感l1的第一端连接第二电容c2的第二端,第一电感l1的第二端连接第二电阻r2的第二端。第一电阻r1的第一端接地,第一电阻r1的第二端连接第二电阻r2的第一端。第二电阻r2的第二端连接第三电容c3的第一端。第三电容c3的第二端接地。
44.第二芯片u2的第一接口1连接第二电容c2的第二端,第二芯片u2的第二接口2接地。
45.在一些实施例中,第一芯片u1采用dc/dc降压芯片,vcc-ext为外部直流电输入端,连接第一芯片u1的第七接口7,通过第二电阻r2与第三电容c3的连接点输出vcc-5v电源。第
determination satellite service,rdss),其特点是由用户以外的控制系统完成用户定位所需的无线电参数的确定与位置计算;另一种称为卫星无线电导航业务(radio navigation satellite system,rnss),其特点是用户通过接收多颗卫星信号实现测距,通过自身解定位方程实现位置确定。rnss服务中,用户自身实现定位解算,不占用卫星及地面控制系统的信道与计算资源,因此用户服务数量没有限制。在本实施例中,通过rnss模块实现位置信息的测算,获取飞行器的位置信息,位置信息包括经纬度和定位时间,通过rdss模块进行短报文通信,将位置信息和航姿信息通过北斗卫星200发送给地面控制中心300。
56.在一些实施例中,射频通信单元130连接天线阵子,天线阵子可以为有源天线馈电,采用有源天线馈线提高了整个通信链路的集成度。
57.如图6所示的九轴惯性导航单元140包括第五芯片u5、第九电容c9和第十电容c10、第五电阻r5和第六电阻r6。第五芯片u5的第一接口1连接vcc-3.3v电源,第五芯片u5的第二接口2接地,第五芯片u5的第五接口5至第七接口7和第九接口9悬空,第五芯片u5的第八接口8连接第九芯片u9的gpio口,通过高低电平控制第五芯片u5是否进行复位动作。第五芯片u5的第三接口3通过第五电阻r5连接单片机单元120,第五芯片u5的第四接口4通过第六电阻r6连接单片机单元120,第五芯片u5的第三接口3为comp_tx信号端,第五芯片u5的第四接口4为comp_rx信号端,对航向角、横滚角、俯仰角等信息数据进行存储和转发。第九电容c9的第一端连接第五芯片u5的第一接口1,第九电容c9的第二端接地,第十电容c10的第一端连接第五芯片u5的第一接口1,第十电容c10的第二端接地。第九电容c9和第十电容c10为对地电容,起滤波作用。
58.所述航迹跟踪装置100还包括外部控制设备。所述外部控制设备包括用于存储数据的sd卡电路、用于连接外部设备进行信息传输的mini usb电路、用于连接北斗通信卡进行通信的sim卡电路、用于获取电池电量的电池电量采样电路和用于指示所述航迹跟踪装置工作状态的led指示灯。
59.所述单片机单元分别连接所述sd卡电路、所述mini usb电路、所述电池电量采样电路和所述led指示灯,所述射频通信单元连接所述sim卡电路。
60.单片机单元120控制所述sd卡电路,将所述航迹信息存储在sd卡上。如图7所示的sd卡电路包括第六芯片u6、第七电阻r7至第十八电阻r18和第十一电容c11。第六芯片u6的第一接口1、第二接口2、第三接口3、第七接口7和第八接口8分别通过第十四电阻r14、第十五电阻r15、第十六电阻r16、第十七电阻r17和第十八电阻r18连接vcc-3.3v电源。第六芯片u6的第六接口6接地。第六芯片u6的第一接口1、第二接口2、第三接口3、第五接口5、第七接口7和第八接口8分别通过第七电阻r7至第十三电阻r13连接第九芯片u9的第六十五接口65、第六十六接口66、第七十八接口78、第七十九接口79、第八十接口80和第八十三接口83,将射频通信单元130和九轴惯性导航单元140输出的航迹信息存储在sd卡中。第十一电容c11的第一端连接第十电阻r10,第十一电容c11的第二端接地。
61.单片机单元120控制所述mini usb电路,通过所述mini usb电路连接外部处理器并进行数据传输。如图8所示的mini usb电路包括第七芯片u7、第十九电阻r19至第二十二电阻r22、第十二电容c12和第十三电容c13。
62.第七芯片u7的第一接口1通过第十九电阻r19连接vcc-5v电源,第七芯片u7的第二接口2通过第二十电阻r20连接第九芯片u9的第七十接口70,第七芯片u7的第三接口3通过
第二十一电阻r21连接第九芯片u9的第七十一接口71,第七芯片u7的第二接口2为usb_d 信号端,第七芯片u7的第三接口3为usb_d-信号端,用于实现mini usb的读取功能。第七芯片u7的第四接口4和第六接口6至第十一接口11悬空,第七芯片u7的第五接口5接地。第二十二电阻r22的第一端连接第七芯片u7的第三接口3,第二十二电阻r22的第二端连接vcc-3.3v电源。第十二电容c12的第一端连接第七芯片u7的第一接口1,第十二电容c12的第二端接地。第十三电容c13的第一端连接第七芯片u7的第三接口3,第十三电容c13的第二端接地。第十二电容c12和第十三电容c13为对地电容,起滤波作用。
63.如图9所示的sim卡电路,包括第八芯片u8、第十四电容c14和第二十三电阻r23。第八芯片u8的第一接口1连接vcc-3.3v电源,第八芯片u8的第二接口2、第三接口3和第六接口6为sim-nrst信号端,sim-sclk信号端和sim-data信号端,分别连接到射频通信单元130第四芯片u4的第二十四接口24、第二十五接口25和第二十三接口23。第八芯片u8的第四接口4接地。第八芯片u8的第五接口5悬空。第十四电容c14的第一端连接第八芯片u8的第一接口1,第十四电容c14的第二端接地,为对地滤波电容。第二十三电阻r23的第一端连接第八芯片u8的第一接口1,第二十三电阻r23的第二端连接第八芯片u8的第六接口6。当sim卡槽插入北斗通信卡时,可通过sim卡电路和射频通信单元130完成北斗短报文通信。在一些实施例中,上述航迹跟踪装置100可以采用北斗短报文多卡技术,通过安装配置多张北斗通信卡,实现高频度北斗短报文通信,提高飞行器航迹信息报告的实时性。
64.航迹跟踪装置100包括外接电源模式和内部电池供电模式,当所述航迹跟踪装置100处于所述内部电池供电模式时,所述单片机单元120连接电池电量采样电路,通过led指示灯显示内部电池电量。
65.单片机单元120连接所述led指示灯,所述led指示灯用于指示当前定位状态,短报文通信发射状态,存储容量状态和内部电池电量状态。
66.如图10所示的电池电量采样电路,包括第二十四电阻r24至第二十七电阻r27和第十五电容c15。
67.第二十四电阻r24的第一端连接vbat_in信号端,第二十四电阻r24的第二端连接第二十五电阻r25的第一端,第二十五电阻r25的第二端连接第二十六电阻r26的第一端,第二十六电阻r26的第二端接地。第十五电容c15的第一端连接第二十五电阻r25的第一端,第十五电容c15的第二端连接第二十六电阻r26的第二端。第二十七电阻r27的第一端连接第二十五电阻r25的第一端,第二十七电阻r27的第二端连接vtest信号端。
68.第十五电容c15为对地滤波电容。vbat_in信号端连接内部电池的输出端,为内置电池输出端电压大小,通过精密电阻第二十四电阻r24、第二十五电阻r25和第二十六电阻r26分压后,第二十七电阻r27第二端的vtest可表示为:
[0069][0070]
vtest信号端连接到第九芯片u9的第十六接口16,并设置电量分段阈值,并通过外部led灯进行指示。上述航迹跟踪设备设置七个led灯,每个双极性led灯可显示两种颜色,led灯的两个管脚分别连接到第九芯片u9的不同gpio口,led1红色连接到第九芯片u9的第十五接口15、led1蓝色连接到第九芯片u9的第五接口5,以此类推,led2、led3、led4、led5、led6、led7的红、蓝灯分别连接到第九芯片u9的第四十三接口43、第二十一接口21、第九十
八接口98、第九十七接口97、第四十五接口45、第四十四接口44、第三十九接口39和第三十八接口38,并通过第九芯片u9的gpio口的高低电平控制led灯的亮暗:
[0071]
当11.8v≤vtest≤12.2v时,亮4个蓝灯;
[0072]
当11.4v≤vtest≤11.8v时,亮3个蓝灯;
[0073]
当11.0v≤vtest≤11.4时,亮2个蓝灯;
[0074]
当10.6≤vtest≤11.0v时,亮1个蓝灯;
[0075]
当vtest<10.6时,亮4个红灯。
[0076]
如图11所示的单片机单元120,包括第九芯片u9、第二十八电阻r28至第五十二电阻r52、第十六电容c16至第十八电容c18、第一电池bt1和第一晶体振荡器y1。第九芯片u9型号为stm32f103。第九芯片u9的第二十五接口25和第二十六接口26通过第二十八电阻r28和第二十九电阻r29连接射频通信单元130的rdss_rx信号端和rdss_tx信号端,用于管理射频通信单元130rdss模块的短报文通信功能。第九芯片u9的第四十七接口47和第四十八接口48分别通过第三十三电阻r33和第三十四电阻r34连接射频通信单元130的rnss_rx信号端和rnss_tx信号端,用于管理射频通信单元130rnss模块输出的位置信息。第九芯片u9的第六十八接口68和第六十九接口69通过第三十电阻r30和第三十一电阻r31连接九轴惯性导航单元140的comp_rx信号端和comp_tx信号端,用于管理九轴惯性导航模块输出的航姿信息。
[0077]
第九芯片u9的第六十五接口65、第六十六接口66、第七十八接口78、第七十九接口79、第八十接口80和第八十三接口83分别连接sd卡电路的sdio_d0信号端、sdio_d1信号端、sdio_d2信号端、sdio_d3信号端、sdio_sck信号端和sdio_cmd信号端,用于管理sd卡中信息的存储,可以将飞行器的航姿信息存储到sd卡中。第九芯片u9的第七十接口70和第七十一接口71连接mini usb电路的usb-d-信号端和usb-d 信号端,用于管理usb接口,和外部设备进行信息传输。第九芯片u9的第十六接口16连接电池电量采样电路的vtest信号端,用于获取内部电池的剩余电量。第九芯片u9的第十五接口15、第五接口5、第四接口4、第三接口3、第二接口2、第一接口1、第九十八接口98、第九十七接口97、第四十五接口45、第四十四接口44、第三十九接口39、第三十八接口38、第六十二接口62和第六十一接口61分别连接7个led灯的共14个管脚,用于控制航迹跟踪设备不同工作状态下led灯的亮暗。
[0078]
第九芯片u9的第三十七接口37通过第三十二电阻r32接地,第九芯片u9的第九十四接口94通过第三十八电阻r38接地,用于选择单片机的启动模式。第九芯片u9的第六接口6连接第一电池bt1,其中第一电池bt1为纽扣电池,为第九芯片u9的内部rtc模块供电,第十六电容c16一端连接第九芯片u9的第六接口6,另一端接地,为接地滤波电容。第九芯片u9的第十二接口12和第十三接口13通过第一晶体振荡器y1连接,第一晶体振荡器y1频率为8mhz,用于给第九芯片u9提供稳定时钟。第十七电容c17一端连接第九芯片u9的第十二接口12,另一端接地,第十八电容c18一端连接第九芯片u9的第十三接口13,另一端接地,第十七电容c17和第十八电容c18能够使8mhz的时钟更纯净。
[0079]
本实用新型在整体电路设计中通过采用滤波器对元件或设备进行屏蔽,增强了对带外无用信号的抑制,阻碍了干扰途径,将干扰抑制于扰乱电子系统或子系统正常工作的电平以下,提高了系统的抗干扰能力。使得上述航迹跟踪装置100能够在电磁环境下正常工作,确保航迹跟踪装置100在进行短报文通信的过程中,不干扰飞机上电子通讯设备的正常
工作,从而保证收发全链路的电磁兼容性。
[0080]
由于传导发射主要体现在电源线上,因此本实用新型在电源的设计上采取了多种措施,如合理选择滤波电路,接地隔离等,同时,设备发射端采用高抑制度滤波器,有效抑制发射频段带外杂散,减弱了外界电磁环境对装置的干扰。
[0081]
上述航迹跟踪装置100的各单元都采用低功耗设计,使得航迹跟踪装置100整机为低功耗设备,便于用户安装和运行。
[0082]
本实用新型还提供了一种航迹跟踪系统,包括航迹跟踪装置100,北斗卫星200和地面控制中心300;所述航迹跟踪装置100能够获取飞行器的航迹信息,并将所述航迹信息通过所述北斗卫星200的短报文通信发送至地面控制中心300;所述航迹信息包括位置信息和航姿信息,其中所述位置信息通过所述北斗卫星200信号获取,所述航姿信息通过所述航迹跟踪装置100获取;所述地面控制中心300能够接收和分析所述航迹信息,并根据所述航迹信息对飞行器进行监控和追踪。
[0083]
本实用新型包含的地面控制中心300与航迹跟踪装置100两部分,共同组成航迹跟踪系统,该系统利用北斗短报文通信方式进行通信,通信成功率高、误码率低,并且能够不受地域限制,实时进行通信。地面控制中心300收到短报文信息后,识别短报文信息并作出响应。短报文通信的范围为东南亚地区,可完全覆盖通航飞机的飞行区域,大大提升收发信息链路的可靠性。上述航迹跟踪系统还可以实现较高的通信频度。普通用户发送短报文的时间频率为1分钟1次,本实用新型可实现20秒1次的通信频度,在每20秒内定时摘取三秒钟的位置信息,通过短报文通信形式将本机的航迹信息发送给地面控制中心300。
[0084]
以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。