技术特征:
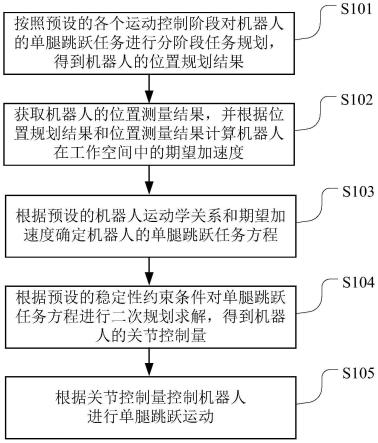
1.一种单腿跳跃运动控制方法,其特征在于,包括:按照预设的各个运动控制阶段对机器人的单腿跳跃任务进行分阶段任务规划,得到所述机器人的位置规划结果;获取所述机器人的位置测量结果,并根据所述位置规划结果和所述位置测量结果计算所述机器人在工作空间中的期望加速度;根据预设的机器人运动学关系和所述期望加速度确定所述机器人的单腿跳跃任务方程;根据预设的稳定性约束条件对所述单腿跳跃任务方程进行二次规划求解,得到所述机器人的关节控制量;根据所述关节控制量控制所述机器人进行单腿跳跃运动。2.根据权利要求1所述的单腿跳跃运动控制方法,其特征在于,所述位置规划结果包括质心位置规划结果和摆动脚位置规划结果;所述位置测量结果包括质心位置测量结果和摆动脚位置测量结果;所述期望加速度包括第一期望加速度和第二期望加速度;所述根据所述位置规划结果和所述位置测量结果计算所述机器人在工作空间中的期望加速度,包括:根据所述质心位置规划结果和所述质心位置测量结果计算所述第一期望加速度;根据所述摆动脚位置规划结果和所述摆动脚位置测量结果计算所述第二期望加速度。3.根据权利要求2所述的单腿跳跃运动控制方法,其特征在于,所述单腿跳跃任务方程包括第一任务方程和第二任务方程;所述根据预设的机器人运动学关系和所述期望加速度确定所述机器人的单腿跳跃任务方程,包括:根据所述机器人运动学关系和所述第一期望加速度确定所述第一任务方程;根据所述机器人运动学关系和所述第二期望加速度确定所述第二任务方程。4.根据权利要求3所述的单腿跳跃运动控制方法,其特征在于,所述根据预设的稳定性约束条件对所述单腿跳跃任务方程进行二次规划求解,得到所述机器人的关节控制量,包括:确定与所述第一任务方程对应的第一优化目标函数;确定与所述第二任务方程对应的第二优化目标函数;根据所述第一优化目标函数和所述第二优化目标函数确定与所述单腿跳跃任务方程对应的综合优化目标函数;根据所述稳定性约束条件对所述综合优化目标函数进行二次规划求解,得到所述关节控制量。5.根据权利要求4所述的单腿跳跃运动控制方法,其特征在于,所述根据所述第一优化目标函数和所述第二优化目标函数确定与所述单腿跳跃任务方程对应的综合优化目标函数,包括:对所述第一优化目标函数和所述第二优化目标函数进行加权求和,得到所述综合优化目标函数。6.根据权利要求1至5中任一项所述的单腿跳跃运动控制方法,其特征在于,所述各个运动控制阶段包括:控制所述机器人将质心移动至支撑腿上方的第一阶段、控制所述机器
人抬高摆动腿的第二阶段、控制所述机器人起跳的第三阶段和控制所述机器人腾空并落地的第四阶段。7.根据权利要求1至5中任一项所述的单腿跳跃运动控制方法,其特征在于,所述稳定性约束条件包括:动力学一致性约束条件、摩擦锥约束条件、关节力矩约束条件和零力矩点约束条件。8.一种单腿跳跃运动控制装置,其特征在于,包括:位置规划模块,用于按照预设的各个运动控制阶段对机器人的单腿跳跃任务进行分阶段任务规划,得到所述机器人的位置规划结果;期望加速度计算模块,用于获取所述机器人的位置测量结果,并根据所述位置规划结果和所述位置测量结果计算所述机器人在工作空间中的期望加速度;单腿跳跃任务方程确定模块,用于根据预设的机器人运动学关系和所述期望加速度确定所述机器人的单腿跳跃任务方程;二次规划求解模块,用于根据预设的稳定性约束条件对所述单腿跳跃任务方程进行二次规划求解,得到所述机器人的关节控制量;单腿跳跃运动控制模块,用于根据所述关节控制量控制所述机器人进行单腿跳跃运动。9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的单腿跳跃运动控制方法的步骤。10.一种机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的单腿跳跃运动控制方法的步骤。
技术总结
本申请属于机器人技术领域,尤其涉及一种单腿跳跃运动控制方法、装置、计算机可读存储介质及机器人。所述方法包括:按照预设的各个运动控制阶段对机器人的单腿跳跃任务进行分阶段任务规划,得到所述机器人的位置规划结果;获取所述机器人的位置测量结果,并根据所述位置规划结果和所述位置测量结果计算所述机器人在工作空间中的期望加速度;根据机器人运动学关系和所述期望加速度确定所述机器人的单腿跳跃任务方程;根据稳定性约束条件对所述单腿跳跃任务方程进行二次规划求解,得到所述机器人的关节控制量;根据所述关节控制量控制所述机器人进行单腿跳跃运动,使得机器人在完成单腿跳跃动作的同时,满足稳定性约束条件,从而实现平稳落地。从而实现平稳落地。从而实现平稳落地。
技术研发人员:罗秋月
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:2022.08.08
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。