1.本发明涉及绿化修剪技术领域,特别是涉及一种绿篱机的移动载具安装结构。
背景技术:
2.为提升道路绿化修剪的效率,出现了一些将绿篱机装载在移动载具上,利用移动载具的可移动性和可载重性,能够更加轻便的对道路绿化进行修剪;
3.目前针对车载道路绿化修剪,最大的问题在于行进速率和修剪质量之间的平衡,在传统的单一功能的车载修剪中,其行进速率极低,因为要不断手动调整绿篱机姿态以保证修剪质量,后来为提升效率,在移动载具上增设探测装置,以探测路面情况,根据路面情况计算绿篱机在经过该段路面时的位移量,再控制绿篱机主动进行位移以弥补该位移量,保证绿化修剪的平滑和连续性,一定程度上的提升了行进的速率;
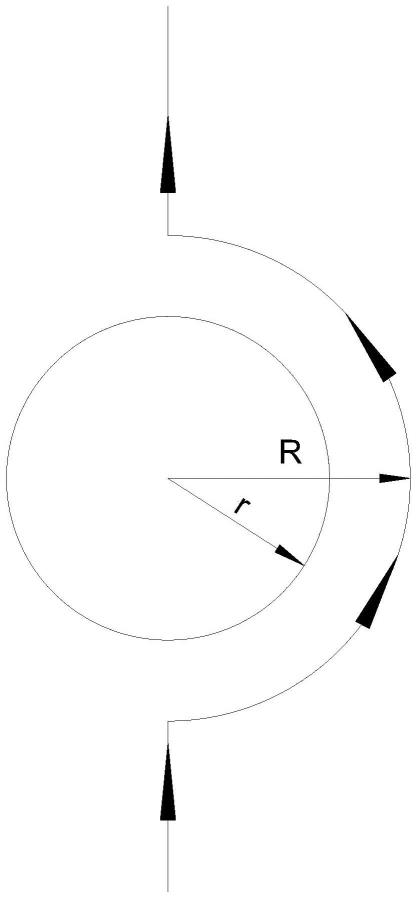
4.但这种做法需要在经过需要位移的路段时,对移动载具上的绿篱机的姿态调整效率就决定了移动载具通过该路段的行进速率,例如图1所示的,移动载具前方遇一半径r=0.2m的小坑,移动载具绕过该小坑时,绕其圆心行走一个半径为r=0.3m的半圆后再复归直行,则移动载具在该路段行进的路程为πr≈0.942米,在移动载具通过这0.942米的过程中,绿篱机的安装结构需要完成对绿篱机的一次横移往返驱动动作,现行的绿篱机的安装结构中,驱动效率较低,对绿篱机的一次横移往返0.3m的驱动动作需要约3秒,则现行的绿篱机的安装结构使得移动载具在通过该路段时的最大行进速率为0.942米/3秒,约1.13km/h,此速度远小于移动载具的正常行进速度,且移动载具在小坑之前和通过小坑之后还需要分别进行减速及加速过程,这使得移动载具的整体行进效率低下,绿篱修剪的整体效率低。
技术实现要素:
5.为解决现有技术中存在的问题,本发明提供了一种绿篱机的移动载具安装结构,该绿篱机的移动载具安装结构通过配置高速驱动的横向调整装置和高度调整装置,大大提升对绿篱机的姿态调整效率,使得移动载具通过需要避障的路段的效率更高,进一步的,提升了移动载具的整体行进速度,即绿篱修剪的整体效率更高。
6.为实现上述目的,本发明采用如下技术方案:
7.本发明提供了一种绿篱机的移动载具安装结构,用于将绿篱机安装在移动载具上,包括:
8.横向调整装置,所述横向调整装置用于调整绿篱机的横向位置;
9.高度调整装置,所述高度调整装置用于调整绿篱机的高度;
10.所述横向调整装置和高度调整装置均为高速驱动装置。
11.本发明的工作原理如下:在移动载具行进至需要避障的路段时,所述横向调整装置和高度调整装置启动对绿篱机的姿态进行调整,高速驱动的横向调整装置和高度调整装置能够在较短的时间内完成对绿篱机的姿态调整,进而使得移动载具在通过该路段的时间更少,提升移动载具的整体平均车速,提升绿篱修剪的整体效率,对绿篱机高度的调整和横
向的调整能够满足绿篱机姿态调整的绝大部分需求。
12.本发明的绿篱机的移动载具安装结构通过配置高速驱动的横向调整装置和高度调整装置,大大提升对绿篱机的姿态调整效率,使得移动载具通过需要避障的路段的效率更高,进一步的,提升了移动载具的整体行进速度,即绿篱修剪的整体效率更高。
13.在进一步的技术方案中,所述高度调整装置和横向调整装置均包括:
14.运动座,所述运动座用于在驱动机构的驱动下进行直线运动;
15.导柱,所述导柱延运动座的直线运动的方向设置,所述运动座通过直线轴承与导柱连接,所述导柱用于为运动座的直线运动导向;
16.驱动机构,所述驱动机构在运动座直线运动的两个方向上均有设置,所述驱动用于驱动运动座延导柱的长度方向进行直线运动。
17.高度调整装置和横向调整装置均为直线运动驱动,且在其直线运动的两个方向上分别设置一个驱动机构,使得单个驱动机构不需要进行正向驱动、急停、反向驱动的过程,急停及换向的过程由另一个方向的驱动机构完成,相对于单个驱动机构,往复运动的效率更高。
18.在进一步的技术方案中,所述驱动机构包括:
19.钢索,所述钢索用于传递动力,曳引机通过钢索驱动运动座进行直线运动;
20.滑轮组,所述滑轮组用于改变钢索走向,便于曳引机的设置;
21.曳引机,所述曳引机用于通过钢索驱动运动座进行直线运动。
22.利用曳引机牵引钢索带动运动座运动,驱动效率高,且驱动过程平稳,便于控制。
23.在进一步的技术方案中,所述高度调整装置的导柱竖直设置,所述高度调整装置的运动座在竖直方向上进行直线运动,所述高度调整装置的位于运动座上方的驱动机构还包括配重块。
24.在高度调整装置中设置配重块,更加便于对运动座进行驱动,使得曳引机的功率要求更低,整体成本更低。
25.在进一步的技术方案中,所述横向调整装置还包括:
26.导座,所述导座用于为导轮的运动导向,并通过导轮承受来自运动座的重力;
27.导轮,所述导轮连接在运动座上,所述导轮用于降低运动座运动时的摩擦力,同时将来自运动座的重力传递至导座。
28.通过设置导座和导轮,使得来自横向调整装置的重力不会施加到导柱上,导柱的使用寿命更长,且横向调整装置的运动座的驱动摩擦力更小,更加便于对横向调整装置的运动座进行驱动。
29.在进一步的技术方案中,还包括:
30.角度调整装置,所述角度调整装置用于调整绿篱机的角度。
31.通过增设角度调整装置,使得绿篱机的角度可以根据需要调整,进一步的提升了绿篱机的姿态调整自由度,进一步的提升了绿篱机修剪的质量。
32.在进一步的技术方案中,所述角度调整装置包括纵向角度调整装置和水平角度调整装置。
33.通过纵向角度调整装置可以对绿篱机的纵向角度进行调整,在具有横向坡度的路面依旧可以正常进行绿篱修剪,通过水平角度调整装置对绿篱机的水平角度进行调整,即
可以对相对于移动载具不同方向的绿篱进行修剪。
34.在进一步的技术方案中,所述纵向角度调整装置的调整范围为
±
5度,所述水平角度调整装置的调整范围为
±
90度。
35.纵向角度调整
±
5度的范围可以应对绝大部分横向坡度的路面,其范围较小,便于进行整体结构的设计,同时体积和成本都较小,水平角度调整
±
90度的范围使得绿篱机对移动载具左侧和右侧两个方向上的绿篱均可进行修剪。
36.有益效果在于:
37.1、本发明的绿篱机的移动载具安装结构通过配置高速驱动的横向调整装置和高度调整装置,大大提升对绿篱机的姿态调整效率,使得移动载具通过需要避障的路段的效率更高,进一步的,提升了移动载具的整体行进速度,即绿篱修剪的整体效率更高。
38.2、高度调整装置和横向调整装置均为直线运动驱动,且在其直线运动的两个方向上分别设置一个驱动机构,使得单个驱动机构不需要进行正向驱动、急停、反向驱动的过程,急停及换向的过程由另一个方向的驱动机构完成,相对于单个驱动机构,往复运动的效率更高。
39.3、利用曳引机牵引钢索带动运动座运动,驱动效率高,且驱动过程平稳,便于控制。
40.4、在高度调整装置中设置配重块,更加便于对运动座进行驱动,使得曳引机的功率要求更低,整体成本更低。
41.5、通过设置导座和导轮,使得来自横向调整装置的重力不会施加到导柱上,导柱的使用寿命更长,且横向调整装置的运动座的驱动摩擦力更小,更加便于对横向调整装置的运动座进行驱动。
42.6、通过增设角度调整装置,使得绿篱机的角度可以根据需要调整,进一步的提升了绿篱机的姿态调整自由度,进一步的提升了绿篱机修剪的质量。
43.7、通过纵向角度调整装置可以对绿篱机的纵向角度进行调整,在具有横向坡度的路面依旧可以正常进行绿篱修剪,通过水平角度调整装置对绿篱机的水平角度进行调整,即可以对相对于移动载具不同方向的绿篱进行修剪。
44.8、纵向角度调整
±
5度的范围可以应对绝大部分横向坡度的路面,其范围较小,便于进行整体结构的设计,同时体积和成本都较小,水平角度调整
±
90度的范围使得绿篱机对移动载具左侧和右侧两个方向上的绿篱均可进行修剪。
附图说明
45.图1是移动载具在通过小坑时的运动示意图;
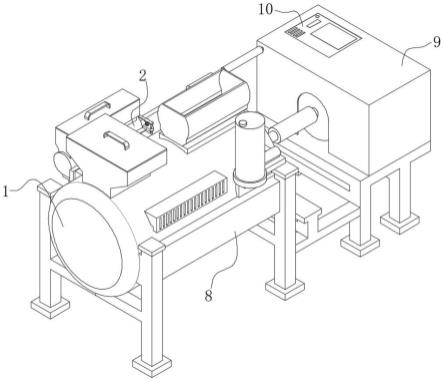
46.图2是本发明实施例的绿篱机的移动载具安装结构的整体结构示意图;
47.图3是本发明实施例的绿篱机的移动载具安装结构的高度调整装置的结构示意图;
48.图4是本发明实施例的绿篱机的移动载具安装结构的横向调整装置的结构示意图。
49.附图标记:
50.10、横向调整装置;11、横移座;12、导座;13、导轮;20、角度调整装置;30、高度调整
装置;31、安装架;32、导柱;33、升降台;34、直线轴承;35、驱动机构;351、钢索;352、滑轮组;353、曳引轮;40、绿篱机;50、移动载具。
具体实施方式
51.下面结合附图对本发明作进一步说明:
52.实施例:
53.如图2所示,一种绿篱机的移动载具安装结构,用于将绿篱机40安装在移动载具50上,包括:
54.横向调整装置10,横向调整装置10用于调整绿篱机40的横向位置;
55.高度调整装置30,高度调整装置30用于调整绿篱机40的高度;
56.横向调整装置10和高度调整装置30均为高速驱动装置。
57.在本实施例中,横向调整装置10安装在移动载具50上,高度调整装置30安装在横向调整装置10上,绿篱机40安装在高度调整装置30上。
58.本发明的工作原理如下:在移动载具50行进至需要避障的路段时,横向调整装置10和高度调整装置30启动对绿篱机40的姿态进行调整,高速驱动的横向调整装置10和高度调整装置30能够在较短的时间内完成对绿篱机40的姿态调整,进而使得移动载具50在通过该路段的时间更少,提升移动载具50的整体平均车速,提升绿篱修剪的整体效率,对绿篱机40高度的调整和横向的调整能够满足绿篱机40姿态调整的绝大部分需求。
59.绿篱机40的横向位置是指绿篱机40相对于移动载具50的车身前后方向的左右方向。
60.本发明的绿篱机40的移动载具50安装结构通过配置高速驱动的横向调整装置10和高度调整装置30,大大提升对绿篱机40的姿态调整效率,使得移动载具50通过需要避障的路段的效率更高,进一步的,提升了移动载具50的整体行进速度,即绿篱修剪的整体效率更高。
61.在本实施例中,同样以如图1所示的情景为例,本实施例中高速驱动的横向调整装置10对绿篱机40的一次横移往返0.3m的驱动动作控制在约0.5秒,则本实施例的绿篱机40的安装结构使得移动载具50在通过该路段时的最大行进速率为0.942米/0.5秒,约6.78km/h,此速度在道路绿篱修剪上已经接近甚至超过绿篱机40修剪的最大速度,即已经可以避免因绿篱机40姿态调整的时间所需过长而对移动载具50行进速率造成影响。
62.需要强调的是,实际应用中还需要考虑移动载具50本身的体积,在移动载具50避障时移动载具50的位移对绿篱机40空间位置的影响,且针对不同状况,例如无法绕过的减速带,只能直行通过,此时对于绿篱机40状态的调整情况与上述举例不同,但与上述举例相同的点是,针对避障而进行的姿态调整无论如何调整,原则上均需要再恢复初始的状态,以延续正常修剪,因此姿态的调整均为往复运动,上述举例及对比,仅为证明调整装置对绿篱机40姿态调整的效率对移动载具50行进效率的影响,高速驱动的调整装置对整体绿篱修剪效率的提升。
63.在另外一个实施例中,高度调整装置30和横向调整装置10均包括:
64.运动座,运动座用于在驱动机构35的驱动下进行直线运动;
65.导柱32,导柱32延运动座的直线运动的方向设置,运动座通过直线轴承34与导柱
32连接,导柱32用于为运动座的直线运动导向;
66.驱动机构35,驱动机构35在运动座直线运动的两个方向上均有设置,驱动用于驱动运动座延导柱32的长度方向进行直线运动。
67.在本实施例中,以如图3所示的高度调整装置30的结构为例,在本实施例中,高度调整装置30的运动座为图3中的升降台33,绿篱机40即安装在升降台33上。还包括安装架31,安装架31用于安装导柱32及驱动机构35。
68.如图4所示的横向调整装置10中,运动座为横移座11,高度调整装置30的安装架31安装在横移座11上。
69.高度调整装置30和横向调整装置10均为直线运动驱动,且在其直线运动的两个方向上分别设置一个驱动机构35,使得单个驱动机构35不需要进行正向驱动、急停、反向驱动的过程,急停及换向的过程由另一个方向的驱动机构35完成,相对于单个驱动机构35,往复运动的效率更高,能够实现数倍于现有的单个驱动机构35的驱动效率。
70.具体控制方式举例如下:
71.在单程长度为l的行程中,前为加速阶段,此时其中一个驱动机构35大功率驱动运动座加速,中为匀速阶段,此时该驱动机构35降低功率,保持运动座速度,后为降速阶段,此时该驱动机构35断电,另外一个驱动机构35反向全力驱动运动座,给运动座一个反向加速度,使其减速,最终在l的终点,运动座停下并开始反向运动,待返程的前反向的驱动机构35始终大功率驱动运动座进行加速,在返程的中反向的驱动机构35降低功率,并在返程的后中断电,由正向的驱动机构35反向驱动运动座减速,上述功率的调整可通过变频电机实现。
72.在另外一个实施例中,驱动机构35包括:
73.钢索351,钢索351用于传递动力,曳引机通过钢索351驱动运动座进行直线运动;
74.滑轮组352,滑轮组352用于改变钢索351走向,便于曳引机的设置;
75.曳引机,曳引机用于通过钢索351驱动运动座进行直线运动。
76.利用曳引机牵引钢索351带动运动座运动,驱动效率高,且驱动过程平稳,便于控制。
77.在本实施例中,同样以图3所示的高度调整装置30的结构为例,在升降台33的上下两侧分别连接钢索351,并利用设置在安装架31上的滑轮组352改变钢索351走向,钢索351的另一端分别绕过上下两个曳引机的曳引轮353,上下两个曳引机分别通过曳引轮353牵引钢索351带动升降台33延导柱32上下移动。
78.在本实施例中,滑轮组352包括一个定滑轮,可以理解的是,可以通过增设滑轮来进一步的改变钢索走向,进一步的对曳引机设置的位置进行调整。
79.在另外一个实施例中,如图3所示,高度调整装置30的导柱32竖直设置,高度调整装置30的运动座在竖直方向上进行直线运动,高度调整装置30的位于运动座上方的驱动机构35还包括配重块。
80.在高度调整装置30中设置配重块,更加便于对运动座进行驱动,使得曳引机的功率要求更低,整体成本更低。
81.在另外一个实施例中,如图4所示,横向调整装置10还包括:
82.导座12,导座12用于为导轮13的运动导向,并通过导轮13承受来自运动座的重力;
83.导轮13,导轮13连接在运动座上,导轮13用于降低运动座运动时的摩擦力,同时将
来自运动座的重力传递至导座12。
84.通过设置导座12和导轮13,使得来自横向调整装置10的重力不会施加到导柱32上,导柱32的使用寿命更长,且横向调整装置10的运动座的驱动摩擦力更小,更加便于对横向调整装置10的运动座进行驱动。
85.在本实施例中,如图4所示,横向调整装置10的横移座11的左右两侧分别连接三根钢索351。
86.在本实施例中,横向调整装置10的导柱32两端采用活动的安装方式,以避免其承受来自横移座11的重力,例如在导柱32的两端设置安装架31,安装架31上开设有竖直方向的槽,导柱32的端部位于该槽中,并在导柱32与槽底之间设置弹簧,以弹簧保持导柱32的高度,导柱32上下活动的范围不需要很大,只要能抵消掉导轮13运动所产生的高度变化,避免重力传递至导柱32上即可,因此导柱32本身的稳定性仍旧可以保证。
87.对于绿篱机40的横向调整来说,其对于精度要求不高,因此设置导轮13的形式,以滚动摩擦代替滑动摩擦,虽然可能出现抖动,但实际对于绿篱机40来说,极小幅度的误差不影响整体修剪的效果。
88.在另外一个实施例中,如图2所示,还包括:
89.角度调整装置20,角度调整装置20用于调整绿篱机40的角度。
90.通过增设角度调整装置20,使得绿篱机40的角度可以根据需要调整,进一步的提升了绿篱机40的姿态调整自由度,进一步的提升了绿篱机40修剪的质量。
91.在另外一个实施例中,角度调整装置20包括纵向角度调整装置20和水平角度调整装置20。
92.通过纵向角度调整装置20可以对绿篱机40的纵向角度进行调整,在具有横向坡度的路面依旧可以正常进行绿篱修剪,通过水平角度调整装置20对绿篱机40的水平角度进行调整,即可以对相对于移动载具50不同方向的绿篱进行修剪。
93.在实际应用中,移动载具50往往在绕过障碍时并不是完全的直线运动,运动轨迹是一条弧线,这就使得对单纯对绿篱机40横向位置的调整不能满足需求,虽然对于绿篱修剪来说,允许的误差范围较大,但通过设置水平角度调整装置20,可以对该部分的角度上的误差进行弥补,使得修剪的质量更高,同时为弥补该部分误差的驱动对效率要求不高,因此各种驱动装置皆可。
94.在另外一个实施例中,纵向角度调整装置20的调整范围为
±
5度,水平角度调整装置20的调整范围为
±
90度。
95.纵向角度调整
±
5度的范围可以应对绝大部分横向坡度的路面,其范围较小,便于进行整体结构的设计,同时体积和成本都较小,水平角度调整
±
90度的范围使得绿篱机40对移动载具50左侧和右侧两个方向上的绿篱均可进行修剪。
96.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。