技术特征:
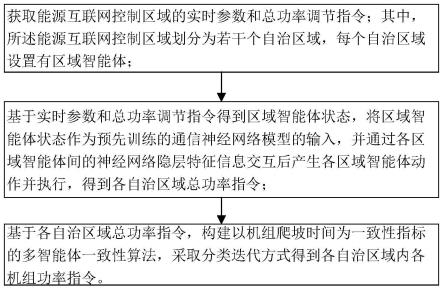
1.一种基于多智能体的能源互联网功率指令分配方法,其特征在于,包括:获取能源互联网控制区域的实时参数和总功率调节指令;其中,所述能源互联网控制区域划分为若干个自治区域,每个自治区域设置有区域智能体;基于实时参数和总功率调节指令得到区域智能体状态,将区域智能体状态作为预先训练的通信神经网络模型的输入,并通过各区域智能体间的神经网络隐层特征信息交互后产生各区域智能体动作并执行,得到各自治区域总功率指令;基于各自治区域总功率指令,构建以机组爬坡时间为一致性指标的多智能体一致性算法,采取分类迭代方式得到各自治区域内各机组功率指令。2.根据权利要求1所述的基于多智能体的能源互联网功率指令分配方法,其特征在于,所述自治区域包含多种不同类型或同种类型的多个分布式发电机组;所述区域智能体通过和相邻区域智能体进行信息交互来实现区域间功率的分配,得到各自治区域总功率指令。3.根据权利要求1所述的基于多智能体的能源互联网功率指令分配方法,其特征在于,所述基于实时参数和总功率调节指令得到区域智能体状态包括:将每个负荷扰动断面的p
load
和总功率指令δp作为状态,则t时段第n个区域智能体状态表示为:4.根据权利要求1所述的基于多智能体的能源互联网功率指令分配方法,其特征在于,所述通信神经网络模型包含策略网络和价值网络,采用ddpg算法进行训练获得到所述通信神经网络模型的参数,包括:在t时刻区域n区域智能体的策略网络输入区域智能体状态输出区域智能体动作各区域智能体执行动作并获得t时刻的相同的奖励r
tn
,且各区域智能体根据此时的控制策略进行状态转移,到达下一时刻的状态并反馈,经验存储入经验池;价值网络输入区域智能体状态和区域智能体动作,对所选择的区域智能体动作进行评估,指导策略网络更新参数;当训练次数<n时,重复计算区域智能体状态和区域智能体动作,直至训练次数到达n时,完成策略网络和价值网络的训练,得到所述预先训练的通信神经网络模型,n为预先设定的训练次数。5.根据权利要求4所述的基于多智能体的能源互联网功率指令分配方法,其特征在于,所述在t时刻区域n区域智能体的策略网络输入区域智能体状态输出区域智能体动作包括:将每个负荷扰动断面的p
load
和总功率指令作为状态,则t时段第n个区域智能体状态表示为:所述区域智能体动作为:t时段第n个区域智能体动作表示为:
式中,分别为选择的微型燃气轮机、小水电、生物质机组、燃料电池和柴油机组功率分配因子;各机组的功率约束为:式中,分别为微型燃气轮机调节功率容量的下限和上限;分别为小水电机组调节容量的下限和上限;分别为生物质发电机组调节容量的下限和上限;为燃料电池机组调节容量的下限和上限;分别为柴油机组可调容量的下限和上限。6.根据权利要求4所述的基于多智能体的能源互联网功率指令分配方法,其特征在于,所述各区域智能体执行动作并获得t时刻的相同的奖励r
tn
中,所述奖励以各机组参与调频总成本和调节指令设定值跟踪误差为奖励函数;自治区域间的功率指令优化分配时综合考虑各机组参与调频总成本c
total
和调节指令设定值跟踪误差
△
p
e
,则奖励函数为:式中,δp
e
=δp-∑δp
gj
,
△
p
gj
为选定的第j个代表发电机组调节功率,α
j
、β
j
和γ
j
为第j个发电机组调频成本各项系数。7.根据权利要求1所述的基于多智能体的能源互联网功率指令分配方法,其特征在于,所述通过各区域智能体间的神经网络隐层特征信息交互后产生各区域智能体动作并执行,是在输入信息前向传播过程中与相邻区域智能体共享均值池化处理后的通信神经网络模型的神经网络隐层状态信息后产生区域智能体动作并执行,得到各自治区域间总功率指令;所述得到各自治区域间总功率指令满足以下的功率平衡约束:δp
i
=λ
i
δp
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)式中,
△
p为agc控制器计算得到的总功率指令,
△
p
i
和λ
i
分别为第i个自治区域间发电功率指令目标值和功率分配因子,且8.根据权利要求1所述的基于多智能体的能源互联网功率指令分配方法,其特征在于,所述基于各自治区域总功率指令,构建以机组爬坡时间为一致性指标的多智能体一致性算法,采取分类迭代方式得到各自治区域内各机组功率指令;具体包括:选择机组功率爬坡时间t
im
作为一致性指标,爬坡时间为:
式中,
△
p
im
和分别为第i个自治区域第m台机组的发电功率和爬坡速率,爬坡速率为:式中,和分别为第i个自治区域第m台机组功率上调速率限制和下调功率速率限制;通过区域智能体获得第n个区域总功率δp
n
,则区域内功率分配时按照区分不同类型机组进行一致性更新,各类型机组接口智能体在交互相应一致指标,第n个区域中各机组基于机组爬坡时间一致性更新如下:机组爬坡时间一致性更新如下:式中,
△
p
ne
为第k 1次迭代,区域总功率指令与各类机组承担总功率之间的差值,t
mt
、t
h
、t
be
、t
fc
和t
ds
分别为微型燃气轮机、小水电、生物质机组、燃料电池和柴油机组爬坡时间一致性指标,d
ij
为各类型机组拓扑的行随机矩阵在k次迭代中的第(i,j)项,ε为功率误差调节因子,且ε>0。9.根据权利要求8所述的基于多智能体的能源互联网功率指令分配方法,其特征在于,所述区域内功率分配时按照区分不同类型机组进行一致性更新,包括:根据区域总功率指令
△
p
i
,判断机组速率调节方向;不同种类分布式机组进行一致性指标t
im
迭代;计算得各机组功率判断
△
p
im
是否超过机组功率限值,若达到机组功率限值时,按机组功率上下限计算机组功率及爬坡时间同时更新网络拓扑结构;机组功率及爬坡时间分别为:
计算区域总功率指令与各类机组承担总功率之间的差值
△
p
ne
;判断|δp
ne
|是否超过功率误差调节因子ε;当|δp
ne
|>ε时,重复计算直至|δp
ne
|≤ε,得到各机组功率指令
△
p
im
。10.一种基于多智能体的能源互联网功率指令分配系统,其特征在于,包括:参数获取模块,用于获取能源互联网控制区域的实时参数和总功率调节指令;其中,所述能源互联网控制区域划分为若干个自治区域,每个自治区域设置有区域智能体;自治区域间功率分配模块,用于基于实时参数和总功率调节指令得到区域智能体状态,将区域智能体状态作为预先训练的通信神经网络模型的输入,并通过各区域智能体间的神经网络隐层特征信息交互后产生各区域智能体动作并执行,得到各自治区域总功率指令;自治区域内功率分配模块,用于基于各自治区域总功率指令,构建以机组爬坡时间为一致性指标的多智能体一致性算法,采取分类迭代方式得到各自治区域内各机组功率指令。11.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利要求1~9任一项所述基于多智能体的能源互联网功率指令分配方法的步骤。12.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1~9任一项所述基于多智能体的能源互联网功率指令分配方法的步骤。
技术总结
本发明公开了一种基于多智能体的能源互联网功率指令分配方法及系统,包括:获取能源互联网控制区域的实时参数和总功率调节指令;基于实时参数和总功率调节指令得到区域智能体状态,将区域智能体状态作为预先训练的通信神经网络模型的输入,并通过各区域智能体间的神经网络隐层特征信息交互后产生各区域智能体动作并执行,得到各自治区域总功率指令;基于各自治区域总功率指令,构建以机组爬坡时间为一致性指标的多智能体一致性算法,采取分类迭代方式得到各自治区域内各机组功率指令。该方法将从以下两个方面全面提升能源互联网中参与AGC控制的分布式机组功率最优分配的管控水平。水平。水平。
技术研发人员:张彬文 王新迎 李烨 项添春 王天昊
受保护的技术使用者:国网天津市电力公司 国家电网有限公司
技术研发日:2022.08.15
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。