1.本发明涉及车辆安全监控技术,具体涉及一种车上在逃人员下车倾向预测方法和系统。
背景技术:
2.在追逃的车内监视场景中,有时逃犯会出于搏命或者侥幸的心理,往往想要通过逃车的行为来躲避追捕,虽然从结果上很难起到有效作用,但一定程度上仍旧加大了抓捕人员的工作繁琐度。
3.针对上述问题,目前已经采用的手段有,通过在车辆上安装外部摄像头,从而在逃犯离车后能够通过摄像头得知逃犯的大致逃跑路线,从而进行追捕。但是,这样一方面存在滞后性,需要抓捕人员调用摄像头的录像才可以得知,另一方面,外部的摄像头往往存在监控死角,无法及时调整角度观测到逃犯,大大影响了抓捕的效率和成功率。
4.公开号为cn113570871a的发明申请《一种基于多维度的车辆人员上下车判断方法及系统》中,通过获取监控区域的录像来获取车辆特征部件的状态信息,并根据该状态信息来判断是否存在疑似车辆人员上下车事件,从而避免单纯地依靠普通摄像机采集的图像受到周围环境影响干扰较大导致的图像准确度难以保证的问题。
5.然而,上述方案中同样存在着诸多缺陷。首先是,该方式只能够对已经发生的事件进行识别,效率上就较差,且采用热成像的方式进行人员判断,一定程度上判断精度不高,最后,该方案的应用环境仅限于停车场等通用环境,适用性差。
6.公开号为cn110334858a的发明申请《一种公交车剩余座位智能预测方法和装置》中,采用wifi获取乘客的手机mac地址信息,根据获取mac信息的时间来确定乘客上下车的信息,并构建特征矩阵,训练乘客上下车预测模型进行预测。该方案能够分析乘客在车厢中的分布及密度,帮助推荐乘客密度最小的车厢,提示乘客向哪些车厢走,或推荐最近的座位给乘客。
7.上述的方案虽然一定程度上是涉及了对车上人员上下车的判断,但依赖的是wifi以及手机mac地址信息的获取,并不能够适用于本文前述的技术背景环境下,且通过该方式对乘客的手机进行监视,具有侵犯隐私的风险。
技术实现要素:
8.针对现有技术中存在的不足,本发明目的是提供一种效率高、适用范围广的能够预测到车上人员上下车倾向的车上在逃人员下车倾向预测方法和系统。
9.为解决上述技术问题,本发明提供的技术方案是:所述的车上在逃人员下车倾向预测方法,包括以下步骤:
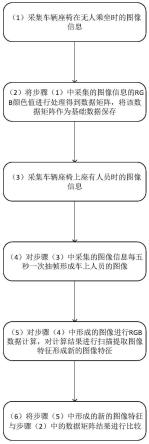
10.(1)采集车辆座椅在无人乘坐时的图像信息;
11.(2)将步骤(1)中采集的图像信息的rgb颜色值进行处理得到数据矩阵,将该数据矩阵作为基础数据保存;
12.(3)采集车辆座椅上座有人员时的图像信息;
13.(4)对步骤(3)中采集的图像信息每五秒一次抽帧形成车上人员的图像;
14.(5)对步骤(4)中形成的图像进行rgb数据计算,对计算结果进行扫描提取图像特征形成新的图像特征;
15.(6)将步骤(5)中形成的新的图像特征与步骤(2)中的数据矩阵结果进行比较。
16.在上述技术方案中,首先通过摄像头来分别采集车内无人乘坐以及有人乘坐时的图像信息,并分别对图像信息进行rgb分析,在有人乘坐时,再将实时分析的图像特征与无人乘坐时分析的图像特征进行比对,最后通过比对的结果来预测车上的人员是否具有下车倾向。该方式可通过车内的摄像头完成,适用范围广,无需考虑到车外环境,其次通过两种情况下的比对来进行判断,判断精度高,效率高,速度快,由此能够预测在逃人员的下车位置,并将位置发送到中心服务器来辅助警方进行在逃追踪。
17.优选的,在步骤(2)中,对加权处理后得到的像素点合并并进行全图扫描形成新的数据矩阵特征值,重复该步骤直到形成数据位数为256以内的数据矩阵,将该数据矩阵作为基础数据保存。
18.优选的,进行加权处理形成单一值,计算为r:23、g:24、b:25,计算后得值023024025,将该值按像素位置填充形成与图像对应的数据矩阵,按行进行4*4像素点合并。
19.优选的,在步骤(6)中,进行比较时确定数据变化最大和最小行数、最大和最小列数,将比较结果保存到数据矩阵的最后一列中,重复步骤(5)和步骤(6),连续提取多次位移数据,并将位移数据形成的数据进行保存,对位移数据进行列数据对比,根据对比得到的结果作为高、根据步骤(2)得到的基础数据作为底求曲线仰角,若仰角>45
°
,则判断人员具有下车倾向。
20.优选的,列数据中使用后一个数据减前一个数据形成位移参量,公式为y=x(n)-x(n-1)。
21.所述的车上在逃人员下车倾向预测系统,包括
22.摄像模块,用于采集车内座椅上无人乘坐以及有人乘坐时的图像信息;
23.rgb分析模块,用于对采集的图像信息进行分析处理;
24.比对判断模块,用于对分析处理得到的结果信息进行比对,并判断人员是否具有下车倾向;
25.车机tbox模块,用于保存rgb分析模块以及比对判断模块的结果信息。
26.在上述技术方案中,首先通过摄像模块来分别采集车内无人乘坐以及有人乘坐时的图像信息,并通过rgb分析模块来分别对图像信息进行rgb分析,在有人乘坐时,通过比对判断模块将实时分析的图像特征与无人乘坐时分析的图像特征进行比对,最后通过比对的结果来预测车上的人员是否具有下车倾向。该方式可通过车内的摄像头完成,适用范围广,无需考虑到车外环境,其次通过两种情况下的比对来进行判断,判断精度高,效率高,速度快,由此能够预测在逃人员的下车位置,并将位置发送到中心服务器来辅助警方进行在逃追踪。
27.优选的,rgb分析模块将无人乘坐时采集的图像信息的rgb颜色值进行加权处理,得到的像素点合并进行全图扫描形成新的数据矩阵特征值,重复该过程直到形成数据位数为256以内的数据矩阵,该数据矩阵作为基础数据保存;
28.rgb分析模块将有人乘坐时的图像信息每五秒一次抽帧形成车上人员的图像,并对该图像进行rgb数据计算,对计算结果进行扫描提取图像特征形成新的图像特征。
29.优选的,进行加权处理形成单一值,计算为r:23、g:24、b:25,计算后得值023024025,rgb分析模块将该值按像素位置填充形成与图像对应的数据矩阵,按行进行4*4像素点的合并。
30.优选的,比对判断模块在进行比较时确定数据变化最大和最小行数、并将比较结果保存到数据矩阵的最后一列中,重复该过程连续提取多次位移数据,并将位移数据形成的数据进行保存,对位移数据进行列数据对比,根据对比得到的结果作为高、基础数据作为底求曲线仰角,若仰角>45
°
,则判断人员具有下车倾向。
31.优选的,列数据中使用后一个数据减前一个数据形成位移参量,公式为y=x(n)-x(n-1)。
32.与现有技术相比,本方案具备的显著优点有:
33.1、通过设置在车内的摄像头进行图像信息获取,扩大了适用范围,不受外部环境影响;
34.2、通过对无人以及有人时不同的图像信息进行比对分析来判断车上人员是否存在下车倾向,从而起到预测的目的,且速度快,精度高。
附图说明
35.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
36.图1为本发明中预测方法的步骤流程图;
37.图2为本发明中预测系统的模块结构图。
具体实施方式
38.以下结合附图对本发明的优选实例进行说明,应当理解,此处所描述的优选实例仅用于说明和解释本发明,并不用于限定本发明。
39.如图1所示,本发明所述的车上在逃人员下车倾向预测方法,包括以下步骤:
40.(1)采集车辆座椅在无人乘坐时的图像信息;
41.(2)将步骤(1)中采集的图像信息的rgb颜色值进行加权处理形成单一值,计算为r:23、g:24、b:25,计算后得值023024025,将该值按像素位置填充形成与图像对应的数据矩阵,按行进行4*4像素点合并,合并后进行全图扫描形成新的数据矩阵特征值,重复该步骤直到形成数据位数为256以内的数据矩阵,将该数据矩阵作为基础数据保存;
42.(3)采集车辆座椅上座有人员时的图像信息;
43.(4)对步骤(3)中采集的图像信息每五秒一次抽帧形成车上人员的图像;
44.(5)对步骤(4)中形成的图像进行rgb数据计算,对计算结果进行扫描提取图像特征形成新的图像特征;
45.(6)将步骤(5)中形成的新的图像特征与步骤(2)中的数据矩阵结果进行比较,进行比较时确定数据变化最大和最小行数、最大和最小列数,将比较结果保存到数据矩阵的最后一列中,重复步骤(5)和步骤(6),连续提取多次位移数据,并将位移数据形成的数据进
行保存,对位移数据进行列数据对比,如:
46.位移矩阵为:
[0047][0048]
结果矩阵为:
[0049][0050]
根据对比得到的结果作为高、根据步骤(2)得到的基础数据作为底求曲线仰角,若仰角>45
°
,则判断人员具有下车倾向,列数据中使用后一个数据减前一个数据形成位移参量,公式为y=x(n)-x(n-1)。
[0051]
在上述技术方案中,首先通过摄像头来分别采集车内无人乘坐以及有人乘坐时的图像信息,并分别对图像信息进行rgb分析,在有人乘坐时,再将实时分析的图像特征与无人乘坐时分析的图像特征进行比对,最后通过比对的结果来预测车上的人员是否具有下车倾向。该方式可通过车内的摄像头完成,适用范围广,无需考虑到车外环境,其次通过两种情况下的比对来进行判断,判断精度高,效率高,速度快,由此能够预测在逃人员的下车位置,并将位置发送到中心服务器来辅助警方进行在逃追踪。
[0052]
如图2所示,本发明所述的车上在逃人员下车倾向预测系统,包括
[0053]
摄像模块,用于采集车内座椅上无人乘坐以及有人乘坐时的图像信息;
[0054]
rgb分析模块,用于对采集的图像信息进行分析处理,具体为,将无人乘坐时采集的图像信息的rgb颜色值进行加权处理形成单一值,计算为r:23、g:24、b:25,计算后得值023024025,rgb分析模块将该值按像素位置填充形成与图像对应的数据矩阵,按行进行4*4像素点的合并,随后进行全图扫描形成新的数据矩阵特征值,重复该过程直到形成数据位数为256以内的数据矩阵,该数据矩阵作为基础数据保存;
[0055]
此外,rgb分析模块还将有人乘坐时的图像信息每五秒一次抽帧形成车上人员的图像,并对该图像进行rgb数据计算,对计算结果进行扫描提取图像特征形成新的图像特征;
[0056]
比对判断模块,用于对分析处理得到的结果信息进行比对,并判断人员是否具有下车倾向,比对判断模块在进行比较时确定数据变化最大和最小行数、并将比较结果保存到数据矩阵的最后一列中,重复该过程连续提取多次位移数据,并将位移数据形成的数据进行保存,对位移数据进行列数据对比,根据对比得到的结果作为高、基础数据作为底求曲线仰角,若仰角>45
°
,则判断人员具有下车倾向,列数据中使用后一个数据减前一个数据形成位移参量,公式为y=x(n)-x(n-1);
[0057]
车机tbox模块,用于保存rgb分析模块以及比对判断模块的结果信息。
[0058]
在上述技术方案中,首先通过摄像模块来分别采集车内无人乘坐以及有人乘坐时的图像信息,并通过rgb分析模块来分别对图像信息进行rgb分析,在有人乘坐时,通过比对判断模块将实时分析的图像特征与无人乘坐时分析的图像特征进行比对,最后通过比对的结果来预测车上的人员是否具有下车倾向。该方式可通过车内的摄像头完成,适用范围广,无需考虑到车外环境,其次通过两种情况下的比对来进行判断,判断精度高,效率高,速度快,由此能够预测在逃人员的下车位置,并将位置发送到中心服务器来辅助警方进行在逃
追踪。
[0059]
最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
