1.本发明涉及巡检机器人技术领域,特别是涉及一种牵引式巡检机器人。
背景技术:
2.现有方案中,牵引动机器人的钢丝布置在刚性轨道旁并与刚性轨道平行,在刚性轨道尽头缠绕在轮盘上。由于其驱动钢丝仅在两端拉紧,导致其只能沿直线布置,无法实现转向功能,同时,由于其使用刚性轨道,自重较大,施工困难且成本较高。
技术实现要素:
3.为解决以上技术问题,本发明提供一种牵引式巡检机器人,具有转向功能,轨道自重较小,成本低,便于施工。
4.为实现上述目的,本发明提供了如下方案:
5.本发明提供一种牵引式巡检机器人,包括第一支撑座、第二支撑座、机器人本体、牵引绳、牵引驱动机构、两个承重机构和多个托举挂钩,所述承重机构包括承重绳和张紧组件,所述张紧组件安装于所述第二支撑座上,所述承重绳一端固定于所述第一支撑座上,所述承重绳另一端由所述张紧组件进行张紧;所述机器人本体包括车身、两个转向架和两个滑动机构,各所述转向架的下端均转动安装于所述车身上,各所述滑动机构均设置于一个所述转向架的上部,各所述滑动机构均用于滑动安装于两个所述承重绳上,所述牵引驱动机构用于通过所述牵引绳带动所述机器人本体沿所述承重绳运动;所述托举挂钩包括主架体、两个挂架和两个弹性导向机构,两个所述挂架分别设置于所述主架体的两侧,各所述挂架均用于套设于一个所述承重绳上,两个所述弹性导向机构对称设置于所述主架体上,所述牵引绳能够由两个所述弹性导向机构之间穿过。
6.优选地,所述机器人本体还包括两个牵引绳固定机构,各所述牵引绳固定机构均设置于一个所述转向架的上部。
7.优选地,所述牵引驱动机构包括主动轮盘、驱动部件和从动轮盘,所述主动轮盘转动安装于所述第一支撑座上,所述驱动部件用于驱动所述主动轮盘转动,所述从动轮盘转动安装于所述第二支撑座上,所述牵引绳的一端固定于一个所述牵引绳固定机构上,所述牵引绳的另一端依次绕设于所述从动轮盘和所述主动轮盘上并固定于另一个所述牵引绳固定机构上。
8.优选地,所述牵引绳固定机构包括连接板、两个固定座、两个夹紧板、多个第一连接螺栓、多个第二连接螺栓和多个螺母,两个所述固定座均通过多个所述第一连接螺栓固定于所述转向架上表面的中部,所述连接板的下端夹持固定于两个所述固定座之间,各所述第二连接螺栓均依次穿过两个所述夹紧板并安装有一个所述螺母,所述连接板的上端夹持固定于两个所述夹紧板之间,所述牵引绳的一端夹持固定于一个所述牵引绳固定机构的两个所述夹紧板之间,所述牵引绳的另一端夹持固定于另一个所述牵引绳固定机构的两个所述夹紧板之间。
9.优选地,所述夹紧板包括竖直板和设置于所述竖直板上部的夹紧块,各所述第二连接螺栓均依次穿过两个所述竖直板并安装有一个所述螺母,所述连接板的上端夹持固定于两个所述竖直板之间,所述牵引绳的一端夹持固定于一个所述牵引绳固定机构的两个所述夹紧块之间,所述牵引绳的另一端夹持固定于另一个所述牵引绳固定机构的两个所述夹紧块之间;所述夹紧块的外侧沿长度方向形成依次连接的第一导向倾斜面、第一弧面和第二导向倾斜面,两个所述夹紧块的两个所述第一导向倾斜面之间的夹角为锐角,两个所述夹紧块的两个所述第二导向倾斜面之间的夹角为锐角。
10.优选地,所述滑动机构包括两个滑动组件,所述滑动组件包括立板、承重滑轮、防脱落滑轮、防脱落滑轮支架、第一定位螺栓、拉簧、第一螺栓和第二螺栓,两个所述立板对称固定于所述转向架上部的两侧,所述防脱落滑轮支架一侧的中部通过所述第一定位螺栓转动安装于所述立板的内壁上,所述防脱落滑轮转动安装于所述防脱落滑轮支架另一侧的上部,所述第一螺栓固定于所述防脱落滑轮支架另一侧的下部,所述第二螺栓固定于所述立板的内壁上且位于所述第一螺栓的一侧,所述拉簧的两端分别安装于所述第一螺栓和所述第二螺栓上,所述承重滑轮转动安装于所述立板内壁的上部,各所述承重绳均位于一个所述承重滑轮和一个所述防脱落滑轮之间。
11.优选地,所述主架体为倒u形支架,所述弹性导向机构包括至少一个弹性导向组件,所述弹性导向组件包括牵引绳引导滑轮、牵引绳保持架、第二定位螺栓和弹簧,所述牵引绳保持架的一端通过所述第二定位螺栓转动安装于所述主架体顶面的下部,所述牵引绳保持架的另一端转动安装有所述牵引绳引导滑轮,所述弹簧的两端分别与所述主架体的一个内侧壁和所述牵引绳保持架连接,所述牵引绳能够由两个所述弹性导向机构中位置相对应的两个所述牵引绳引导滑轮之间穿过。
12.优选地,所述挂架包括底座、导向块、弧形板、水平板和第三连接螺栓,所述底座的两端分别与所述主架体和所述导向块连接,所述第三连接螺栓用于将所述水平板固定于所述底座上,所述弧形板连接于所述水平板的一端且罩设于所述承重绳的外部,所述承重绳位于所述弧形板与所述导向块之间;所述导向块的下部沿长度方向依次形成第三导向倾斜面、第二弧面和第四导向倾斜面,所述第三导向倾斜面与所述第四导向倾斜面之间的夹角为钝角。
13.优选地,所述承重机构还包括第一连接块和第二连接块,所述承重绳的两端分别固定于所述第一连接块和所述第二连接块上,两个所述第一连接块分别固定于所述第一支撑座的两侧;所述张紧组件包括第一张紧滑轮、第二张紧滑轮、安装座、安装板、张紧绳和张紧配重,两个所述安装座分别固定于所述第二支撑座下部的两侧,两个所述第二连接块通过第一连接轴连接,且第一连接轴的两端分别穿过两个所述第二连接块伸至外部,两个所述第一张紧滑轮分别转动安装于所述第一连接轴的两端,两个所述安装座通过第二连接轴连接,且第二连接轴的两端分别穿过两个所述安装座伸至外部,两个所述第二张紧滑轮分别转动安装于所述第二连接轴的两端,两个所述安装板分别套设于所述第二连接轴的两端,且各所述安装板均位于一个所述第二张紧滑轮与一个所述安装座之间,所述第二连接块位于所述第一支撑座与第二支撑座之间,各所述张紧绳的一端均固定于一个所述安装板上,各所述张紧绳的另一端依次绕设于一个所述第一张紧滑轮和一个所述第二张紧滑轮并固定有一个所述张紧配重。
14.优选地,所述机器人本体还包括两个转向轴和至少两个第一轴承,各所述转向轴均固定于所述转向架的下端,各所述转向轴均通过至少一个所述第一轴承转动安装于所述车身上。
15.本发明相对于现有技术取得了以下技术效果:
16.本发明提供的牵引式巡检机器人包括第一支撑座、第二支撑座、机器人本体、牵引绳、牵引驱动机构、两个承重机构和多个托举挂钩,承重机构包括承重绳和张紧组件,本技术中的轨道采用承重绳,自重较小,成本低,同时具备挠性,对安装精度要求低,便于施工。托举挂钩包括主架体、两个挂架和两个弹性导向机构,两个挂架分别设置于主架体的两侧,各挂架均用于套设于一个承重绳上,两个弹性导向机构对称设置于主架体上,牵引绳能够由两个弹性导向机构之间穿过,两个弹性导向机构能够对牵引绳进行导向并约束其位置。由于承重绳具备一定柔性,托举挂钩前后的承重绳可以容许有一定角度,通过连续布置多个托举挂钩能够实现承重绳的转向。同时,机器人本体包括车身、两个转向架和两个滑动机构,各转向架的下端均转动安装于车身上,各转向架上端的滑动机构均滑动安装于两个承重绳上,通过设置两个转向架使得能够沿承重绳做出偏转,使机器人本体拥有沿承重绳构成的轨道进行转向的能力。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
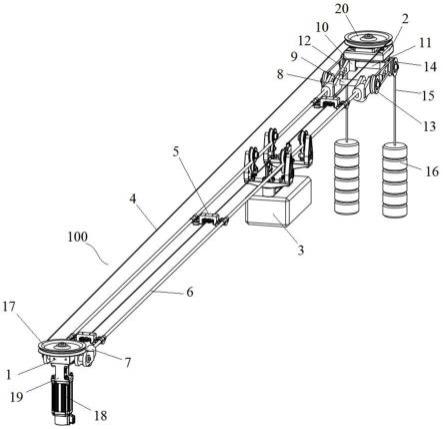
18.图1为本发明提供的牵引式巡检机器人的结构示意图;
19.图2为本发明提供的牵引式巡检机器人中承重绳固定端的结构示意图;
20.图3为本发明提供的牵引式巡检机器人中承重绳张紧端的结构示意图;
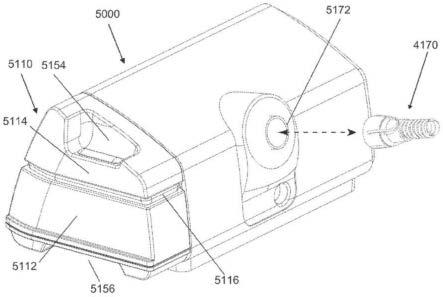
21.图4为本发明提供的牵引式巡检机器人中托举挂钩的第一立体结构示意图;
22.图5为本发明提供的牵引式巡检机器人中托举挂钩的第二立体结构示意图;
23.图6为本发明提供的牵引式巡检机器人中托举挂钩的仰视图;
24.图7为本发明提供的牵引式巡检机器人中机器人本体的结构示意图;
25.图8为本发明提供的牵引式巡检机器人中滑动机构和牵引绳固定机构的结构示意图;
26.图9为本发明提供的牵引式巡检机器人中机器人本体穿过托举挂钩时的结构示意图;
27.图10为本发明提供的牵引式巡检机器人中机器人本体进行转向运动时的结构示意图。
28.附图标记说明:100、牵引式巡检机器人;1、第一支撑座;2、第二支撑座;3、机器人本体;31、车身;32、转向架;33、立板;34、防脱落滑轮支架;35、防脱落滑轮;36、第一定位螺栓;37、第一螺栓;38、第二螺栓;39、拉簧;310、承重滑轮;311、固定座;312、连接板;313、竖直板;314、夹紧块;3141、第一导向倾斜面;3142、第一弧面;3143、第二导向倾斜面;315、第一连接螺栓;316、第二连接螺栓;4、牵引绳;5、托举挂钩;51、主架体;52、底座;53、导向块;
531、第三导向倾斜面;532、第二弧面;533、第四导向倾斜面;54、弧形板;55、水平板;56、第三连接螺栓;57、牵引绳保持架;58、第二定位螺栓;59、牵引绳引导滑轮;510、弹簧;6、承重绳;7、第一连接块;8、第二连接块;9、第一连接轴;10、安装座;11、第二连接轴;12、安装板;13、第一张紧滑轮;14、第二张紧滑轮;15、张紧绳;16、张紧配重;17、主动轮盘;18、驱动电机;19、电机支座;20、从动轮盘。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.本发明的目的是提供一种牵引式巡检机器人,具有转向功能,轨道自重较小,成本低,便于施工。
31.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
32.如图1-图10所示,本实施例提供一种牵引式巡检机器人100,包括第一支撑座1、第二支撑座2、机器人本体3、牵引绳4、牵引驱动机构、两个承重机构和多个托举挂钩5,承重机构包括承重绳6和张紧组件,张紧组件安装于第二支撑座2上,承重绳6一端固定于第一支撑座1上,承重绳6另一端由张紧组件进行张紧,本实施例中的轨道采用承重绳6,自重较小,成本低,同时具备挠性,对安装精度要求低,便于施工。机器人本体3包括车身31、两个转向架32和两个滑动机构,各转向架32的下端均转动安装于车身31上,各滑动机构均设置于一个转向架32的上部,各滑动机构均用于滑动安装于两个承重绳6上,牵引驱动机构用于通过牵引绳4带动机器人本体3沿承重绳6运动;托举挂钩5包括主架体51、两个挂架和两个弹性导向机构,两个挂架分别设置于主架体51的两侧,各挂架均用于套设于一个承重绳6上,挂架起到托举并固定承重绳6的作用,两个弹性导向机构对称设置于主架体51上,牵引绳4能够由两个弹性导向机构之间穿过,两个弹性导向机构能够对牵引绳4进行导向并约束其位置。如图10所示,由于承重绳6具备一定柔性,托举挂钩5前后的承重绳6可以容许有一定角度,通过连续布置多个托举挂钩5能够实现承重绳6的转向。同时,机器人本体3中通过设置两个转向架32使得能够沿承重绳6做出偏转,使机器人本体3拥有沿承重绳6构成的轨道进行转向的能力。此外,通过按一定轨迹布置托举挂钩5还可以实现机器人本体3爬坡和下坡等复杂路径运动,可见,机器人本体3拥有沿承重绳6构成的轨道实现转弯、爬坡和下坡等沿复杂路线行进的能力,不局限于直线行走,解决了牵引式巡检机器人100转向困难、爬坡和下坡角度有限、无法按照任意路线布置的问题。
33.具体地,机器人本体3还包括两个牵引绳固定机构,各牵引绳固定机构均设置于一个转向架32的上部。本实施例中各牵引绳固定机构均设置于一个转向架32上表面的中部。
34.具体地,牵引驱动机构包括主动轮盘17、驱动部件和从动轮盘20,主动轮盘17转动安装于第一支撑座1上,驱动部件用于驱动主动轮盘17转动,从动轮盘20转动安装于第二支撑座2上,牵引绳4的一端固定于一个牵引绳固定机构上,牵引绳4的另一端依次绕设于从动轮盘20和主动轮盘17上并固定于另一个牵引绳固定机构上。工作时,驱动部件驱动主动轮
盘17转动,牵引绳4被带动沿轨道运动,进而带动机器人本体3沿承重绳6运动。需要说明的是,牵引驱动机构还可采用两端布置卷扬机的方式,一端放松,一端收紧即可拖动机器人本体3前进。
35.于本具体实施例中,主动轮盘17下部的主动轮盘轴通过第二轴承转动安装于第一支撑座1上,且主动轮盘17位于第一支撑座1的上方;驱动部件包括驱动电机18和电机支座19,电机支座19固定于第一支撑座1的下方,驱动电机18安装于电机支座19上,驱动电机18的输出轴通过联轴器与主动轮盘轴连接。从动轮盘20下部的从动轮盘轴通过第三轴承转动安装于第二支撑座2上,且从动轮盘20位于第二支撑座2的上方。
36.如图7和图8所示,牵引绳固定机构包括连接板312、两个固定座311、两个夹紧板、多个第一连接螺栓315、多个第二连接螺栓316和多个螺母,两个固定座311均通过多个第一连接螺栓315固定于转向架32上表面的中部,连接板312的下端夹持固定于两个固定座311之间,各第二连接螺栓316均依次穿过两个夹紧板并安装有一个螺母,即通过第二连接螺栓316和螺母将两个夹紧板锁紧固定,连接板312的上端夹持固定于两个夹紧板之间,牵引绳4的一端夹持固定于一个牵引绳固定机构的两个夹紧板之间,牵引绳4的另一端夹持固定于另一个牵引绳固定机构的两个夹紧板之间。
37.于本具体实施例中,夹紧板包括竖直板313和设置于竖直板313上部的夹紧块314,各第二连接螺栓316均依次穿过两个竖直板313并安装有一个螺母,即通过第二连接螺栓316和螺母将两个竖直板313锁紧固定,连接板312的上端夹持固定于两个竖直板313之间,牵引绳4的一端夹持固定于一个牵引绳固定机构的两个夹紧块314之间,牵引绳4的另一端夹持固定于另一个牵引绳固定机构的两个夹紧块314之间。具体地,两个竖直板313对接之后下部形成用于容纳连接板312的第一夹持槽,两个夹紧块314对接之后上部形成用于容纳牵引绳4的第二夹持槽,两个竖直板313通过第二连接螺栓316和螺母锁紧固定之后,连接板312的上端夹紧固定于第一夹持槽中,牵引绳4夹紧固定于第二夹持槽中。如图9所示,夹紧块314的外侧沿长度方向形成依次连接的第一导向倾斜面3141、第一弧面3142和第二导向倾斜面3143,第一导向倾斜面3141与第二导向倾斜面3143之间的夹角为钝角,两个夹紧块314的两个第一导向倾斜面3141之间的夹角为锐角,两个夹紧块314的两个第二导向倾斜面3143之间的夹角为锐角,即两个夹紧块314对接之后前后两端均形成楔形结构。楔形结构能够将两个弹性导向机构挤开,使机器人本体3顺利通过托举挂钩5,当通过托举挂钩5后,两个弹性导向机构重新闭合,继续提供保持牵引绳4位置的功能。
38.具体地,滑动机构包括两个滑动组件,滑动组件包括立板33、承重滑轮310、防脱落滑轮35、防脱落滑轮支架36、第一定位螺栓36、拉簧39、第一螺栓37和第二螺栓38,两个立板33对称固定于转向架32上部的两侧,防脱落滑轮支架36一侧的中部通过第一定位螺栓36转动安装于立板33的内壁上,即第一定位螺栓36固定于立板33的内壁上,防脱落滑轮支架36一侧的中部转动套设于第一定位螺栓36上,防脱落滑轮35转动安装于防脱落滑轮支架36另一侧的上部,第一螺栓37固定于防脱落滑轮支架36另一侧的下部,第二螺栓38固定于立板33的内壁上且位于第一螺栓37的一侧,拉簧39的两端分别安装于第一螺栓37和第二螺栓38上,承重滑轮310转动安装于立板33内壁的上部,各承重绳6均位于一个承重滑轮310和一个防脱落滑轮35之间,承重滑轮310位于承重绳6的上方,防脱落滑轮35位于承重绳6的下方,防脱落滑轮35在拉簧39的作用下压在承重绳6上,与承重滑轮310一起抱住承重绳6,防止机
器人本体3在外力干扰下脱落。本实施例中的机器人本体3采用四个承重滑轮310的设计,使其俯仰稳定性更高。
39.如图4-图6所示,主架体51为倒u形支架,弹性导向机构包括至少一个弹性导向组件,弹性导向组件包括牵引绳引导滑轮59、牵引绳保持架57、第二定位螺栓58和弹簧510,牵引绳保持架57的一端通过第二定位螺栓58转动安装于主架体51顶面的下部,即第二定位螺栓58固定于主架体51顶面的下部,牵引绳保持架57的一端转动套设于第二定位螺栓58上,牵引绳保持架57的另一端转动安装有牵引绳引导滑轮59,弹簧510的两端分别与主架体51的一个内侧壁和牵引绳保持架57连接,在弹簧510的作用下使得两个弹性导向机构中位置相对应的两个牵引绳引导滑轮59相接触。牵引绳4能够由两个弹性导向机构中位置相对应的两个牵引绳引导滑轮59之间穿过,即牵引绳4从两个牵引绳引导滑轮59对接后之间形成的凹槽中穿过,位置相对应的两个牵引绳引导滑轮59能够将牵引绳4约束在轨道的中心。
40.于本具体实施例中,如图6所示,弹性导向机构包括两个弹性导向组件,一个弹性导向机构中的两个弹性导向组件对称设置于主架体51下部的一侧,另一个弹性导向机构中的两个弹性导向组件对称设置于主架体51下部的另一侧。
41.如图4所示,挂架包括底座52、导向块53、弧形板54、水平板55和第三连接螺栓56,底座52的两端分别与主架体51和导向块53连接,第三连接螺栓56用于将水平板55固定于底座52上,弧形板54连接于水平板55的一端且罩设于承重绳6的外部,承重绳6位于弧形板54与导向块53之间,由弧形板54和导向块53完成对承重绳6的限位。如图5所示,导向块53的下部沿长度方向依次形成第三导向倾斜面531、第二弧面532和第四导向倾斜面533,第三导向倾斜面531与第四导向倾斜面533之间的夹角为钝角,当机器人本体3运动至托举挂钩5处时,防脱落滑轮35在导向块53的挤压作用下向下移动,以使得机器人本体3的滑动组件能够通过导向块53,通过将导向块53的下部设置为第三导向倾斜面531、第二弧面532和第四导向倾斜面533,更加利于防脱落滑轮35由导向块53处通过;机器人本体3运动经过托举挂钩5之后,防脱落滑轮35在拉簧39的作用下向上移动,恢复至原位进而与承重滑轮310一起抱住承重绳6。
42.本实施例中的承重机构还包括第一连接块7和第二连接块8,承重绳6的两端分别固定于第一连接块7和第二连接块8上,两个第一连接块7分别固定于第一支撑座1的两侧;张紧组件包括第一张紧滑轮13、第二张紧滑轮14、安装座10、安装板12、张紧绳15和张紧配重16,两个安装座10分别固定于第二支撑座2下部的两侧,两个第二连接块8通过第一连接轴9连接,且第一连接轴9的两端分别穿过两个第二连接块8伸至外部,两个第一张紧滑轮13分别转动安装于第一连接轴9的两端,两个安装座10通过第二连接轴11连接,且第二连接轴11的两端分别穿过两个安装座10伸至外部,两个第二张紧滑轮14分别转动安装于第二连接轴11的两端,两个安装板12分别套设于第二连接轴11的两端,且各安装板12均位于一个第二张紧滑轮14与一个安装座10之间,第二连接块8位于第一支撑座1与第二支撑座2之间,各张紧绳15的一端均固定于一个安装板12上,各张紧绳15的另一端依次绕设于一个第一张紧滑轮13和一个第二张紧滑轮14并固定有一个张紧配重16。于本具体实施例中,两个第一连接块7通过第三连接轴连接,第三连接轴固定于第一支撑座1的下表面,进而实现第一连接块7和第一支撑座1与第一支撑座1的固定连接,本实施例中通过第三连接轴连接两个第一连接块7,通过第一连接轴9连接两个第二连接块8,进而能够保证两个第一连接块7之间的
距离与两个第二连接块8之间的距离相等。需要说明的是,张紧组件还可采用螺栓拉紧或者弹簧拉紧的结构。
43.使用时,将第一支撑座1和第二支撑座2进行固定,并在两个承重绳6上按需求安装多个托举挂钩5,按一定轨迹将多个托举挂钩5进行固定,在张紧配重16的作用下两个承重绳6被牵拉张紧,通过设置多个托举挂钩5防止大跨度下承重绳6悬垂过多,同时在曲线路径中起到导向的作用。
44.本实施例中的机器人本体3还包括两个转向轴和至少两个第一轴承,各转向轴均固定于转向架32的下端,各转向轴均通过至少一个第一轴承转动安装于车身31上。
45.于本具体实施例中,承重绳6为承重钢缆,承重钢缆为较粗的用于承受机器人本体3重量并托举机器人本体3的硬钢缆。牵引绳4为牵引钢索,牵引钢索为较细的用于牵拉机器人本体3使其运动的多股软钢索。张紧绳15为张紧钢缆。
46.本说明书中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。