技术特征:
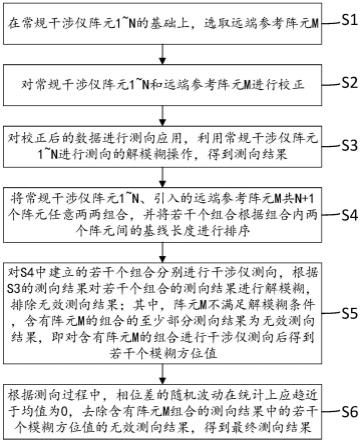
1.一种采用远端参考阵元的干涉仪测向方法,其特征在于,包括以下步骤:s1、在常规干涉仪阵元1~n的基础上,选取远端参考阵元m;s2、对常规干涉仪阵元1~n和远端参考阵元m进行校正;s3、对校正后的数据进行测向应用,利用常规干涉仪阵元1~n进行测向的解模糊操作,得到测向结果;s4、将常规干涉仪阵元1~n、引入的远端参考阵元m共n 1个阵元任意两两组合,并将若干个组合根据组合内两个阵元间的基线长度进行排序;s5、对s4中建立的若干个组合分别进行干涉仪测向,根据s3的测向结果对若干个组合的测向结果进行解模糊,排除无效测向结果;其中,阵元m不满足解模糊条件,含有阵元m的组合的至少部分测向结果为无效测向结果,即对含有阵元m的组合进行干涉仪测向后得到若干个模糊方位值;s6、根据测向过程中,相位差的随机波动在统计上应趋近于均值为0,去除含有阵元m组合的测向结果中的若干个模糊方位值的无效测向结果,得到最终测向结果。2.根据权利要求1所述的一种采用远端参考阵元的干涉仪测向方法,其特征在于,s6中根据测向过程中,相位差的随机波动在统计上应趋近于均值为0,去除含有阵元m组合的测向结果中的若干个模糊方位值的无效测向结果,包括以下步骤:s61、统计基线长度最长的组合的所有模糊方位值;s62、计算除基线长度最长的组合外的其它组合在测向结果为s61中任一模糊方位值时组合内两阵元的相位差,得到参考相位差;s63、计算除基线长度最长的组合外的其它任一组合的参考相位差与实际相位差的差值,并求其平均值,将计算结果作为相位差随机波动值;s64、对s61中所有模糊方位值重复步骤s62~s63,得到对应的相位差随机波动值;s65、选择绝对值最小的相位差随机波动值所对应的模糊方位值作为最终的测向结果。3.根据权利要求2所述的一种采用远端参考阵元的干涉仪测向方法,其特征在于,s62中,参考相位差的计算方法如下:ph_diff_i=l*sin(theata1)/lamda*2*pi=l*sin(theata1)/c*f*2*pi其中,i表示除基线长度最长的组合外的其它组合中第i个组合;ph_diff_i表示第i个组合的参考相位差;l表示常规干涉仪阵元1到阵元n之间的间距;lamda为信号波长;c为光速;f为信号频率;theata1为入射角。4.根据权利要求1至3中任一项所述的一种采用远端参考阵元的干涉仪测向方法,其特征在于,s1中所述远端参考阵元m的选取原则为:远端参考阵元应与常规干涉仪分别处于安装平台可安装范围边缘,两者相对放置,且远端参考阵元应处在常规干涉仪阵元构成的水平线上。5.根据权利要求1至3中任一项所述的一种采用远端参考阵元的干涉仪测向方法,其特征在于,s2中对常规干涉仪阵元1~n进行校正的方法为,利用常规干涉仪阵元1~n的校正表进行数据校正。6.根据权利要求1至3中任一项所述的一种采用远端参考阵元的干涉仪测向方法,其特征在于,s3中利用常规干涉仪阵元1~n进行测向的解模糊操作,得到测向结果包括:phn-ph1=l*sin(theata1)/lamda*2*pi=l*sin(theata1)/c*f*2*pi
theata1=asin[(ph1-ph1)/(2*pi)/f*c/l]其中,phn和ph1分别为常规干涉仪阵元n和常规干涉仪阵元1阵元的相位;l表示常规干涉仪阵元1到阵元n之间的间距;lamda为信号波长;c为光速;f为信号频率;theata1为入射角。7.根据权利要求1至3中任一项所述的一种采用远端参考阵元的干涉仪测向方法,其特征在于,s4中将若干个组合根据组合内两个阵元间的基线长度从短到长进行排序。8.一种采用远端参考阵元的干涉仪测向系统,其特征在于,用于如权利要求1至7中任一项所述的一种采用远端参考阵元的干涉仪测向方法,包括远端参考阵元模块和常规干涉仪模块。9.根据权利要求8所述的一种采用远端参考阵元的干涉仪测向系统,其特征在于,至少两个所述常规干涉仪模块分别与远端参考阵元模块相连。10.根据权利要求8所述的一种采用远端参考阵元的干涉仪测向系统,其特征在于,所述远端参考阵元模块采用单元天线;所述单元天线通过射频电缆与常规干涉仪模块相连,或还包括本地采集分机,所述单元天线与本地采集分机信号连接,所述本地采集分机通过光信号与常规干涉仪模块相连。
技术总结
本发明提供了一种采用远端参考阵元的干涉仪测向方法和系统,方法包括:在常规干涉仪阵元的基础上,选取远端参考阵元;利用常规干涉仪阵元进行测向的解模糊操作,得到测向结果A;将常规干涉仪阵元、引入的远端参考阵元任意两两组合,并将若干个组合根据组合内两个阵元间的基线长度进行由短到长的排序;对这些组合分别进行干涉仪测向,根据测向结果A对若干个组合的测向结果B进行解模糊;根据测向过程中,相位差的随机波动在统计上应趋近于均值为0,去除含有阵元M组合的测向结果中的若干个模糊方位值的无效测向结果,得到最终测向结果。系统用于实现上述方法。利用统计特征解模糊,可作为当前常规干涉仪系统的重要补充,获得测向精度的提升。精度的提升。精度的提升。
技术研发人员:夏校朋 秦俊举 吕乐群 邸晓晓
受保护的技术使用者:中国电子科技集团公司第二十九研究所
技术研发日:2022.07.11
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。