1.本发明涉及旋转机械设备,尤其涉及一种基于自动同步离合器的旋转机械在线动平衡方法及结构。
背景技术:
2.目前,振动问题依然是旋转机械的故障高发问题。旋转机械在转动过程中,当转子重心与回转中心不重合时,旋转状态下就会产生不平衡力,在不平衡力的作用下,转子会产生振动。不平衡是旋转机械最常见的故障原因,在所有振动故障中占比高达80%。对于运行中的旋转机械,如果振动值超过了规定的标准,则必须停机处理。停机处理对于不同的设备,会造成不同程度的经济损失。而现场需要进行动平衡工作时,通常不具备机组停机条件或停机成本过高,动平衡处理工作又需要旋转机械频繁的启停,进行平衡块重量、角度的调整。以发电设备燃气轮机或汽轮机举例,停机一次造成的发电损失可能在千万元以上甚至更高。
3.旋转机械如果确定为不平衡故障或可以用平衡方式处理的其他故障,动平衡就是通过在转子适当部位上加重或去重,调整转子质心位置,使不平衡力减小到能够满足机组稳定运行为止。传统动平衡处理方式需要旋转机械静止状态下采用专门的加重工具,将动平衡配重加到转子上。目前的技术条件下,必须停机进行动平衡工作。有些设备如汽轮机可能需要启停多次,才能达到较好的平衡效果。
4.由此,本发明人凭借多年从事相关行业的经验与实践,提出一种基于自动同步离合器的旋转机械在线动平衡方法及结构,以克服现有技术的缺陷。
技术实现要素:
5.本发明的目的在于提供一种基于自动同步离合器的旋转机械在线动平衡方法及结构,本发明可以实现在旋转机械不停机的情况下,用动平衡方法降低设备的振动,使振动参数达到标准范围,设备可以连续运行,避免机组停机带来的损失,并节省开机成本。
6.本发明的目的是这样实现的,一种基于自动同步离合器的旋转机械在线动平衡方法,包括:采集基于自动同步离合器的旋转机械的振动数据,根据振动数据确定动平衡块的位置和角度;控制自动同步离合器的主动盘和从动盘分离,与叶轮连接的从动盘旋转,主动盘静止,在主动盘上位于前述的位置和角度处施加平衡块,控制自动同步离合器的主动盘和从动盘啮合,完成旋转机械的在线动平衡处理。
7.在本发明的一较佳实施方式中,从动盘随叶轮同步旋转,主动盘能在驱动部的驱动下转动,主动盘上设置主动齿,从动盘上设置从动齿,主动盘和从动盘通过转速差完成主动齿和从动齿的分离或啮合。
8.在本发明的一较佳实施方式中,自动同步离合器上设置锁止环,主动盘和从动盘啮合时,锁止环将主动盘与从动盘锁止,驱动部停止驱动,主动盘在锁止环的作用下随从动盘同步旋转;锁止环解锁,主动盘自动与从动盘分离。
9.在本发明的一较佳实施方式中,所述锁止环固定连接于所述主动盘上。
10.在本发明的一较佳实施方式中,所述驱动部为透平,所述透平上连接控制调节阀,所述控制调节阀能调整所述透平的转速以完成主动盘的转速调整。
11.在本发明的一较佳实施方式中,所述透平为蒸汽透平或空气透平。
12.在本发明的一较佳实施方式中,所述平衡块为加重螺栓。
13.在本发明的一较佳实施方式中,所述主动盘上设置燕尾槽,所述平衡块能安装于所述燕尾槽内。
14.本发明的目的还可以这样实现,一种基于自动同步离合器的旋转机械在线动平衡结构,用于前述的基于自动同步离合器的旋转机械在线动平衡方法中;包括自动同步离合器,所述自动同步离合器包括主动盘、从动盘和锁止环,所述从动盘与叶轮连接;所述主动盘和所述从动盘能通过转速差完成分离或啮合,所述主动盘能静止或随所述从动盘同步旋转,所述主动盘能在静止时安装平衡块以完成在线动平衡处理。
15.在本发明的一较佳实施方式中,所述主动盘上设置棘爪,所述从动盘上设置棘轮,所述棘爪能相对所述棘轮顺时针转动。
16.由上所述,本发明的基于自动同步离合器的旋转机械在线动平衡方法及结构具有如下有益效果:
17.本发明的基于自动同步离合器的旋转机械在线动平衡方法及结构中,自动同步离合器实现平衡块安装位置与叶轮的分离,施加平衡块时,主设备无需停机,施加平衡块后,自动同步离合器啮合,使平衡块对旋转机械起到平衡减振作用;本发明可以实现在旋转机械不停机的情况下,用动平衡方法降低旋转机械的振动,使设备运行中振动参数达到标准范围,同时设备可以连续运行,避免机组停机带来的损失,节省开机成本;本发明适用于多种旋转机械设备,适用范围广泛。
附图说明
18.以下附图仅旨在于对本发明做示意性说明和解释,并不限定本发明的范围。其中:
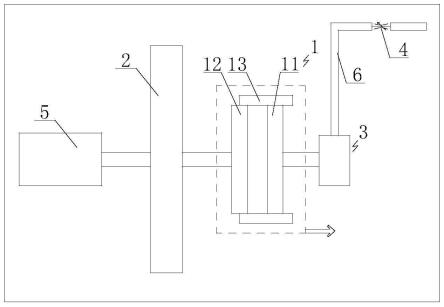
19.图1:为本发明的基于自动同步离合器的旋转机械在线动平衡结构工作状态示意图。
20.图2:为本发明的自动同步离合器的棘轮棘爪示意图。
21.图3:为本发明的自动同步离合器分离状态示意图。
22.图4:为本发明的自动同步离合器啮合未锁止状态示意图。
23.图5:为本发明的自动同步离合器啮合锁止状态示意图。
24.图中:
25.1、自动同步离合器;
26.11、主动盘;111、主动齿;
27.12、从动盘;121、从动齿;
28.13、锁止环;14、棘轮;15、棘爪;
29.2、叶轮;
30.3、透平;
31.4、控制调节阀;
32.5、主电机;
33.6、管道。
具体实施方式
34.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式。
35.在此描述的本发明的具体实施方式,仅用于解释本发明的目的,而不能以任何方式理解成是对本发明的限制。在本发明的教导下,技术人员可以构想基于本发明的任意可能的变形,这些都应被视为属于本发明的范围。需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。术语“安装”、“相连”、“连接”应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
36.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本技术。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
37.如图1至图5所示,本发明提供一种基于自动同步离合器的旋转机械在线动平衡方法,包括:采集基于自动同步离合器的旋转机械的振动数据,根据振动数据确定动平衡块的位置和角度;控制自动同步离合器1的主动盘11和从动盘12分离,与叶轮2(现有技术)连接的从动盘12旋转,主动盘11静止,在主动盘11上位于前述的位置和角度处施加平衡块,控制自动同步离合器的主动盘11和从动盘12啮合,完成旋转机械的在线动平衡处理。自动同步离合器1实现平衡块安装位置与叶轮的分离,施加平衡块时,主设备无需停机,避免机组停机带来的损失。
38.具体地,基于自动同步离合器的旋转机械正常工作过程中,利用现场振动数据采集设备(现有技术)对现场振动数据进行实时采集,及时发现异常振动数据。现场的振动数据包括振动的幅值、相位、频谱等重要信息。根据采集到的振动数据,进行分析计算,运用动平衡理论(现有技术)确定动平衡块的位置和角度(加重位置和角度)。假设根据测量时候的相位,需要在叶轮α角度的位置加重m千克的质量,在基于自动同步离合器的旋转机械中,该配重施加在主动盘上即可。
39.平衡时试加重量计算方法可采用如下公式:
40.在现场平衡时,如果不知道该机的临界转速,一般总把第一次试重的相位角定为90
°
,试加重量计算方法为:
[0041][0042]
其中,w为转子重量(kg),a为轴承振动最大振幅(μ),r为试加重物安装半径(mm),n
为平衡转速(转/分)。
[0043]
本发明的自动同步离合器1中,从动盘12随叶轮2同步旋转,主动盘11能在驱动部的驱动下转动升速,如图3、图4、图5所示,主动盘11上设置主动齿111,从动盘12上设置从动齿121,主动盘11和从动盘12通过转速差完成主动齿111和从动齿121的分离或啮合。
[0044]
进一步,如图3、图4、图5所示,自动同步离合器1上设置锁止环13,如图5所示,主动盘11和从动盘12啮合时,锁止环13将主动盘11与从动盘12锁止,驱动部停止驱动,主动盘11在锁止环的作用下随从动盘12同步旋转;如图3所示,锁止环13解锁,主动盘11自动与从动盘12分离。
[0045]
自动同步离合器1由多个部件组成,自动同步离合器1靠主动盘11和从动盘12的转速差来实现啮合与分离(脱开),在本实施方式中,如图2所示,自动同步离合器1的核心部件是棘轮棘爪结构,棘爪15所在的部件(本发明中,棘爪设置在主动盘上)相对于棘轮14所在的部件(本发明中,棘轮设置在从动盘上)只能顺时针旋转,一旦棘爪15相对于棘轮14逆时针旋转,那么主动齿111和从动齿121就会啮合,实现扭矩传递。
[0046]
如图4、图5所示,自动同步离合器1处于啮合状态时,主动齿111与从动齿121啮合,开始扭矩的传递。锁止环13锁紧前,扭矩只能从主动盘11传递至从动盘12;用锁止环13将主动盘11与从动盘12锁止后,驱动部停止驱动,主动盘11会在锁止环13的作用下随从动盘12同步旋转
[0047]
如图3所示,自动同步离合器1处于分离(脱开)状态时,锁止环13解锁,主动齿111与从动齿121脱开,主动盘与从动盘分别处在各自的状态下,自动同步离合器1处于非工作状态(不传递扭矩)。
[0048]
在本实施方式中,锁止环13固定连接于主动盘11上,自动同步离合器1处于分离(脱开)状态时,锁止环13随主动盘11同步旋转。
[0049]
现有技术中,需要将设备停止运行,待叶轮转速降低至0,然后在α的角度上施加m千克的质量,进行动平衡处理。本发明中,出现异常振动时(根据采集的振动数据确认),设备不停机,锁止环13解锁,驱动部驱动主动盘11转动,在转速差作用下主动盘11和从动盘12分离(脱开),驱动部停止驱动,与叶轮2连接的从动盘12旋转,主动盘11静止,在主动盘11上位于α角度位置处(或者锁止环的α角度位置)施加m千克的平衡块,完成在线动平衡处理。在该状态下,可以在主动盘11上多次配重,将旋转机械(主设备)的振动降低至最佳状态。平衡块施加后,驱动部再次启动,让主动盘与从动盘在线啮合。啮合以后,锁止环13锁紧前,扭矩只能从主动盘11传递至从动盘12;用锁止环13将主动盘11与从动盘12锁止后,驱动部停止驱动,主动盘11会在锁止环13的作用下随从动盘12同步旋转(被拖动旋转)。
[0050]
进一步,如图1所示,驱动部可以采用透平,该透平3为蒸汽透平或空气透平;透平3上连接控制调节阀4,控制调节阀4能调整透平的转速以完成主动盘的转速调整。控制调节阀4设置于与透平3连通的管道6(蒸汽或空气管道)上。控制调节阀4的精度较高,能准确调节控制主动盘的转速,实现和从动盘的精准定点啮合,从而使得加载在主动盘11上α角度上的平衡块质量可以作用在从动盘的α角度上。
[0051]
进一步,驱动部还可以采用主动盘电机。主动盘电机能够精准调速,使得主动盘能和从动盘的精准定点啮合,从而使得加载在主动盘11上α角度上的平衡块质量可以作用在从动盘的α角度上。
[0052]
进一步,平衡块可以采用加重螺栓,通过螺纹连接于主动盘上;平衡块还可以采用采用其它连接方式,如在主动盘上设置燕尾槽,平衡块能安装于燕尾槽内。
[0053]
如图1至图5所示,本发明还提供一种基于自动同步离合器的旋转机械在线动平衡结构,用于前述的基于自动同步离合器的旋转机械在线动平衡方法中;包括自动同步离合器1,自动同步离合器包括主动盘11、从动盘12和锁止环13,从动盘12与叶轮2连接,叶轮2与主电机5连接;主动盘11和从动盘12能通过转速差完成分离或啮合,主动盘11能静止或随从动盘12同步旋转,主动盘11能在静止时安装平衡块以完成在线动平衡处理。
[0054]
进一步,主动盘11上设置棘爪15,从动盘12上设置棘轮14,棘爪15能相对棘轮14顺时针转动。
[0055]
本发明适用于各种旋转机械设备,比如电厂的主机汽轮机、燃气轮机,辅机如引风机、一次风机、送风机等。
[0056]
由上所述,本发明的基于自动同步离合器的旋转机械在线动平衡方法及结构具有如下有益效果:
[0057]
本发明的基于自动同步离合器的旋转机械在线动平衡方法及结构中,自动同步离合器实现平衡块安装位置与叶轮的分离,施加平衡块时,主设备无需停机,施加平衡块后,自动同步离合器啮合,使平衡块对旋转机械起到平衡减振作用;本发明可以实现在旋转机械不停机的情况下,用动平衡方法降低旋转机械的振动,使设备运行中振动参数达到标准范围,同时设备可以连续运行,避免机组停机带来的损失,节省开机成本;本发明适用于多种旋转机械设备,适用范围广泛。
[0058]
以上所述仅为本发明示意性的具体实施方式,并非用以限定本发明的范围。任何本领域的技术人员,在不脱离本发明的构思和原则的前提下所作出的等同变化与修改,均应属于本发明保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。