1.本发明属于低速风洞动态试验技术领域,具体涉及一种非稳态大幅振荡试验方法。
背景技术:
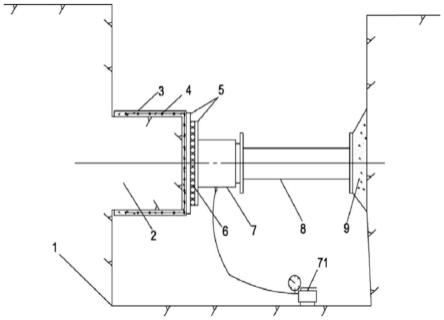
2.为了实现更高的机动性,现代战斗机通常要求具备大迎角过失速机动能力。然而这种快速大幅度机动运动对于飞机的气动特性有很大影响,尤其是严重非线性的气动力和非定常涡动力。传统的动导数试验无法对这种复杂气动力响应进行模拟,目前主要通过大幅振荡试验对其进行研究。大幅振荡试验是在风洞中强迫模型进行大幅度的单自由度或多自由度耦合简谐振荡运动,采集多周期气动力数据后平均处理为单周期气动力历程,进而用于非定常气动特性研究。这种试验方法每车试验采用固定的振荡频率和振幅,多次试验变换频率和振幅组合来建立非定常气动特性数据库。这种方式存在的一个问题是所有数据都是固定振荡运动模式下的周期性气动特性数据,但实际飞行通常是不同机动操纵的组合,几乎不存在周期性飞行历程,因此得到的试验数据并不能覆盖真实飞行的非定常气动特征,也导致利用这种数据对真实飞行历程进行预测会出现偏差。
技术实现要素:
3.为解决上述问题,本发明提供一种非稳态大幅振荡试验方法,能激励出快速大幅运动下的气动特性,也可以对真实飞行的运动状态进行更全面的覆盖,包含更为丰富的非定常气动力特征信息,有利于进行精细化的气动特性研究。
4.本发明解决其技术问题所采用的技术方案如下:一种非稳态大幅振荡试验方法,利用强迫振荡系统进行非稳态大幅振荡试验,通过采集系统对天平数据和模型实时姿态角同步进行采集,包含如下步骤:
5.步骤1,选择振荡运动的时间长度t,确定正弦频率的最小辨析度为δf=1/t;
6.步骤2,选择最大频率f
max
与最小频率f
min
,需满足f
min
≥2/t;利用δf对[f
min
,f
max
]进行划分,得到频率的总数为m=fix[(f
max-f
min
)/δf] 1,fix为向零取整;
[0007]
步骤3,生成初始非稳态振荡激励信号,公式为:
[0008][0009]
式中,m是选取的频率数,t是输入信号的总时长,ak是第k个正弦基信号的振幅,t是包含n个元素的时间序列,φk是第k个正弦基信号的初始相位;
[0010]
在[-π,π]范围内随机给定相角φk的初始值,ak的计算公式为:
[0011][0012]
其中,a为设计信号的目标幅值,n设计信号所包含的正弦总数;
[0013]
步骤4,使用单纯形算法优化φk,使uj的相对峰值系数最小,相对峰值系数计算公
式为:
[0014][0015]
步骤5,对非稳态振荡激励信号uj进行时间偏移的一维线搜索,使信号的初始与结束为零幅值;
[0016]
步骤6,重复步骤4至步骤5,直到相对峰值系数达到设定目标或最大迭代次数,完成非稳态振荡激励信号uj的设计,得到一组最优的相位参数φk;
[0017]
步骤7,给定初始位置、平衡位置、运动过渡的时间长度,将所有数据段按顺序连接,并根据时间间隔重新生成完整的时间序列;
[0018]
步骤8,对于初始位置、平衡位置,其对应的时间段生成角度序列;此后利用步骤6得到的φk,根据试验需求的时间间隔重新生成非稳态振荡激励信号uj,进而得到振荡历程的角度序列为:
[0019][0020]
式中,θ
m,j
为振荡运动的平衡位置,rpf
′
为步骤6得到的信号优化的最终相对峰值系数;
[0021]
步骤9,将初始位置、平衡位置以及振荡历程的角度序列按顺序通过样条插值进行补充,得到光滑的运动过渡段角度序列,整合后得到试验使用的非稳态大幅振荡运动历程;
[0022]
步骤10,检查非稳态大幅振荡运动历程的角速度与角加速度,保证其不超过试验设备的运动性能范围;若角速度或角加速度过大,则通过调整运动过渡的时间长度进行优化;
[0023]
步骤11,在风洞中利用强迫振荡系统驱动试验模型,分别在无风和有风状态下按照设计的非稳态大幅振荡运动历程进行振荡运动,同时采集得到无风和有风天平原始信号分别为v
iw
和v
iy
,i代表天平六元分量;
[0024]
步骤12,将相同历程得到的有风天平信号与无风天平信号进行扣除,得到气动力引起的信号增量为:
[0025]
δvi=v
iy-v
iw
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0026]
利用天平公式对δvi进行迭代计算,得到六元气动力,再通过无量纲计算得到六元气动力系数ci,得到非稳态大幅振荡运动历程下的试验数据;
[0027]
进一步的,非稳态大幅振荡运动历程时间不超过60s。
[0028]
进一步的,非稳态大幅振荡运动角速度不超过
±
200
°
/s,振荡运动角加速度不超过
±
870
°
/s。
[0029]
进一步的,所述的强迫振荡系统实现的非稳态大幅振荡运动角度控制误差不超过3’,动态频率响应幅值衰减低于1%;所述的采集系统的最高采样频率要求不低于1khz,滤波器的截止频率应不低于10hz。
[0030]
进一步的,所述的采集系统的不确定度不大于0.03%fs。
[0031]
本发明的有益效果及优点:本发明的试验方法对非定常气动特征数据获取的效率和含量方面都有明显提升,本发明采用多正弦耦合激励信号设计非稳态大幅振荡运动,利
用此种非周期性振荡运动完成大幅振荡试验,多正弦耦合激励信号可根据关注的运动频带范围进行设计,得到的运动历程为非周期运动,不仅能激励出快速大幅运动下的气动特性,也可以对真实飞行的运动状态进行更全面的覆盖,包含更为丰富的非定常气动力特征信息。
附图说明:
[0032]
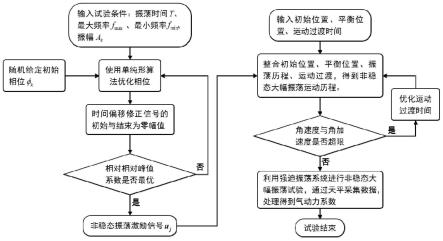
图1为非稳态大幅振荡试验流程图。
[0033]
图2为非稳态大幅振荡运动历程设计说明图;
[0034]
图3为传统的大幅振荡24次试验对比图,(a)试验状态空间分布图,(b)试验结果图;
[0035]
图4为本发明的非稳态大幅振荡1次试验对比图,(a)试验状态空间分布图,(b)试验结果图;
具体实施方式:
[0036]
如图1所示,一种非稳态大幅振荡试验方法,利用强迫振荡系统进行非稳态大幅振荡试验,通过采集系统对天平数据和模型实时姿态角同步进行采集,首先输入试验条件,包括振荡时间、最大频率、最小频率、振幅。随后随机给定初始相位,通过相位优化和时间偏移修正的迭代使相对峰值系数达到最优,得到非稳态振荡激励信号。之后根据输入的初始位置、平衡位置、运动过渡时间整合得到非稳态大幅振荡运动历程。通过优化运动过渡时间使运动历程的角速度与角加速度满足试验系统限制要求。最后利用强迫振荡系统进行非稳态大幅振荡试验,通过天平采集数据,处理得到气动力系数,试验结束。试验方法具体包含以下步骤:
[0037]
步骤1,选择振荡运动的时间长度t,确定正弦频率的最小辨析度为δf=1/t。
[0038]
步骤2,选择最大频率f
max
与最小频率f
min
,需满足f
min
≥2/t。利用δf对[f
min
,f
max
]进行划分,得到频率的总数为m=fix[(f
max-f
min
)/δf] 1,fix为向零取整。
[0039]
步骤3,生成初始非稳态振荡激励信号,公式为:
[0040][0041]
式中,m是选取的频率数,t是输入信号的总时长,ak是第k个正弦基信号的振幅,t是包含n个元素的时间序列,φk是第k个正弦基信号的初始相位。在[-π,π]范围内随机给定相角φk的初始值,ak的计算公式为:
[0042][0043]
其中,a为设计信号的目标幅值,n设计信号所包含的正弦总数。
[0044]
步骤4,使用单纯形算法优化φk,使uj的相对峰值系数最小,相对峰值系数计算公式为
[0045][0046]
步骤5,对非稳态振荡激励信号uj进行时间偏移的一维线搜索,使信号的初始与结束为零幅值。
[0047]
步骤6,重复步骤4至步骤5,直到相对峰值系数达到设定目标或最大迭代次数,完成非稳态振荡激励信号uj的设计,得到一组最优的相位参数φk。
[0048]
步骤7,如图2所示,完整的非稳态大幅振荡运动历程由初始位置、平衡位置、振荡历程、运动过渡四类历程片段组成。给定初始位置、平衡位置、运动过渡的时间长度,将所有数据段按顺序连接,并根据时间间隔重新生成完整的时间序列。
[0049]
步骤8,对于初始位置、平衡位置,其对应的时间段生成角度序列。此后利用步骤6得到的φk,根据试验需求的时间间隔重新生成非稳态振荡激励信号uj,进而得到振荡历程的角度序列为:
[0050][0051]
式中,θ
m,j
为振荡运动的平衡位置,rpf
′
为步骤6得到的信号优化的最终相对峰值系数。
[0052]
步骤9,将初始位置、平衡位置以及振荡历程的角度序列按顺序通过样条插值进行补充,得到光滑的运动过渡段角度序列,整合后得到试验使用的非稳态大幅振荡运动历程。
[0053]
步骤10,检查非稳态大幅振荡运动历程的角速度与角加速度,保证其不超过试验设备的运动性能范围。若角速度或角加速度过大,则通过调整运动过渡的时间长度进行优化。
[0054]
步骤11,在风洞中利用强迫振荡系统驱动试验模型,分别在无风和有风状态下按照设计的非稳态大幅振荡运动历程进行振荡运动,同时采集得到无风和有风天平原始信号分别为v
iw
和v
iy
,i代表天平六元分量。
[0055]
步骤12,将相同历程得到的有风天平信号与无风天平信号进行扣除,得到气动力引起的信号增量为:
[0056]
δvi=v
iy-v
iw
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0057]
利用天平公式对δvi进行迭代计算,得到六元气动力,再通过无量纲计算得到六元气动力系数ci,得到非稳态大幅振荡运动历程下的试验数据。
[0058]
其中,非稳态大幅振荡运动历程时间不超过60s;非稳态大幅振荡运动角速度不超过
±
200
°
/s,振荡运动角加速度不超过
±
870
°
/s;所述的强迫振荡系统实现的非稳态大幅振荡运动角度控制误差不超过3’,动态频率响应幅值衰减低于1%;所述的采集系统的最高采样频率要求不低于1khz,滤波器的截止频率应不低于10hz;所述的采集系统的不确定度不大于0.03%fs。
[0059]
如图3-4所示,本发明非稳态大幅振荡试验一次的试验结果可以涵盖传统大幅振荡试验24次试验的状态范围,且对状态空间的覆盖更加全面;试验数据包含的信息特征较传统大幅振荡试验更加丰富,在数据信息获取的效率和信息含量方面都有明显提升。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。