技术特征:
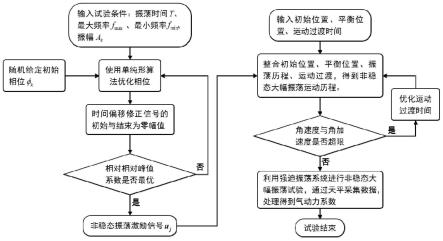
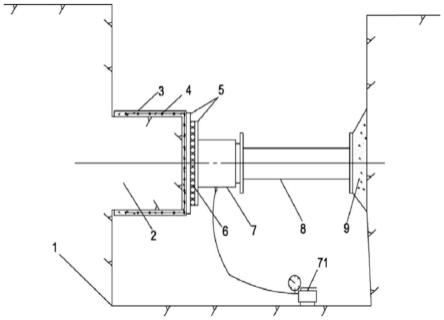
1.一种非稳态大幅振荡试验方法,利用强迫振荡系统进行非稳态大幅振荡试验,通过采集系统对天平数据和模型实时姿态角同步进行采集,其特征在于,包含如下步骤:步骤1,选择振荡运动的时间长度t,确定正弦频率的最小辨析度为δf=1/t;步骤2,选择最大频率f
max
与最小频率f
min
,需满足f
min
≥2/t;利用δf对[f
min
,f
max
]进行划分,得到频率的总数为m=fix[(f
max-f
min
)/δf] 1,fix为向零取整;步骤3,生成初始非稳态振荡激励信号,公式为:式中,m是选取的频率数,t是输入信号的总时长,a
k
是第k个正弦基信号的振幅,t是包含n个元素的时间序列,φ
k
是第k个正弦基信号的初始相位;在[-π,π]范围内随机给定相角φ
k
的初始值,a
k
的计算公式为:其中,a为设计信号的目标幅值,n设计信号所包含的正弦总数;步骤4,使用单纯形算法优化φ
k
,使u
j
的相对峰值系数最小,相对峰值系数计算公式为:步骤5,对非稳态振荡激励信号u
j
进行时间偏移的一维线搜索,使信号的初始与结束为零幅值;步骤6,重复步骤4至步骤5,直到相对峰值系数达到设定目标或最大迭代次数,完成非稳态振荡激励信号u
j
的设计,得到一组最优的相位参数φ
k
;步骤7,给定初始位置、平衡位置、运动过渡的时间长度,将所有数据段按顺序连接,并根据时间间隔重新生成完整的时间序列;步骤8,对于初始位置、平衡位置,其对应的时间段生成角度序列;此后利用步骤6得到的φ
k
,根据试验需求的时间间隔重新生成非稳态振荡激励信号u
j
,进而得到振荡历程的角度序列为:式中,θ
m,j
为振荡运动的平衡位置,rpf
′
为步骤6得到的信号优化的最终相对峰值系数;步骤9,将初始位置、平衡位置以及振荡历程的角度序列按顺序通过样条插值进行补充,得到光滑的运动过渡段角度序列,整合后得到试验使用的非稳态大幅振荡运动历程;步骤10,检查非稳态大幅振荡运动历程的角速度与角加速度,保证其不超过试验设备的运动性能范围;若角速度或角加速度过大,则通过调整运动过渡的时间长度进行优化;步骤11,在风洞中利用强迫振荡系统驱动试验模型,分别在无风和有风状态下按照设计的非稳态大幅振荡运动历程进行振荡运动,同时采集得到无风和有风天平原始信号分别为v
iw
和v
iy
,i代表天平六元分量;步骤12,将相同历程得到的有风天平信号与无风天平信号进行扣除,得到气动力引起
的信号增量为:δv
i
=v
iy-v
iw
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)利用天平公式对δv
i
进行迭代计算,得到六元气动力,再通过无量纲计算得到六元气动力系数c
i
,得到非稳态大幅振荡运动历程下的试验数据。2.根据权利要求1所述的一种非稳态大幅振荡试验,其特征在于:非稳态大幅振荡运动历程时间不超过60s。3.根据权利要求1所述的一种非稳态大幅振荡试验,其特征在于:非稳态大幅振荡运动角速度不超过
±
200
°
/s,振荡运动角加速度不超过
±
870
°
/s。4.根据权利要求1所述的一种非稳态大幅振荡试验,其特征在于:所述的强迫振荡系统实现的非稳态大幅振荡运动角度控制误差不超过3’,动态频率响应幅值衰减低于1%;所述的采集系统的最高采样频率要求不低于1khz,滤波器的截止频率应不低于10hz。5.根据权利要求1所述的一种非稳态大幅振荡试验,其特征在于:所述的采集系统的不确定度不大于0.03%fs。
技术总结
本发明公开一种非稳态大幅振荡试验方法,利用强迫振荡系统进行非稳态大幅振荡试验,通过天平采集数据,采用多正弦耦合激励信号设计非稳态大幅振荡运动,利用此种非周期性振荡运动完成大幅振荡试验。多正弦耦合激励信号可根据关注的运动频带范围进行设计,得到的运动历程为非周期运动,这样的运动不仅能激励出快速大幅运动下的气动特性,也可以对真实飞行的运动状态进行更全面的覆盖,包含更为丰富的非定常气动力特征信息,有利于进行精细化的气动特性研究。性研究。性研究。
技术研发人员:冯帅 沈彦杰 陈昊 谭浩 王延灵
受保护的技术使用者:中国航空工业集团公司哈尔滨空气动力研究所
技术研发日:2022.07.07
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。