1.本发明属于玻璃清洗技术领域,尤其涉及一种玻璃材质表面的激光自适应清洗装置及方法。
背景技术:
2.玻璃类制品,如玻璃窗,玻璃幕墙等有良好的透光性,能使得建筑美观整洁。但玻璃表面沾上灰尘或鸟粪等污垢后不易清洗,尤其是在高楼建筑中,传统的人工清洗方式不仅成本高昂,而且十分危险。近些年火热的擦窗机器人也大多是采用湿抹布擦洗的方式,除灰尘外,难以去除粘粘牢固的污垢,如泥浆,鸟粪等,而且也容易留下水渍,清洗效果不佳。
3.使用激光除污的方式清洗玻璃表面是一个较好的方法,但现有的一些激光清洗玻璃的方法采用固定的激光功率和宽度以及固定的清洗路径和扫描速度对不同程度的污垢进行清洗,无法根据环境中污垢的情况调整清洗策略,在清洗较轻污垢时会产生较多的能量浪费,而部分较顽固的污垢则难以去除。
技术实现要素:
4.本发明目的在于提供一种玻璃材质表面的激光自适应清洗装置及方法,以解决现有的激光清洗玻璃模式固定,无法根据污垢程度调整清晰策略的技术问题。
5.为解决上述技术问题,本发明的一种玻璃材质表面的激光自适应清洗装置及方法的具体技术方案如下:
6.一种玻璃材质表面的激光自适应清洗装置,包括光学光束组件、视觉传感器、图像处理后端、激光发生器、控制电路和显示界面;所述光学光束组件与激光发生器连接,所述激光发生器与控制电路连接,所述视觉传感器与图像处理后端连接,所述图像处理后端与控制电路连接;
7.所述光学光束组件用于实现激光的传导以及线激光宽度的调整;
8.所述激光发生器用于发射不同功率、焦距的线激光;
9.所述视觉传感器用于实时拍摄玻璃表面,获得待清洗玻璃表面的彩色图像和深度信息,并将信息传送到图像处理后端;
10.所述图像处理后端对比预先学习所得的知识库,进行图像分析识别;所述控制电路根据图像处理后端的分析结果控制激光发生器的参数及扫描速度并控制清洗装置的清洗路径和清洗次数;根据图像处理后端识别的图像计算清洁率,根据清洁率控制清洗次数;
11.进一步的,包括i/o接口和显示界面;所述显示界面通过i/o接口与控制电路连接;所述显示界面用于显示装置工作状态、激光参数及清洁率。
12.进一步的,所述激光发生器发射的为窄脉宽激光,激光脉宽在1ns~18ns,激光脉冲能量为100mj~10j。
13.进一步的,所述激光处于不可见光波段,激光形状为线激光。
14.本发明还公开了一种玻璃材质表面的激光自适应清洗方法,包括如下步骤:
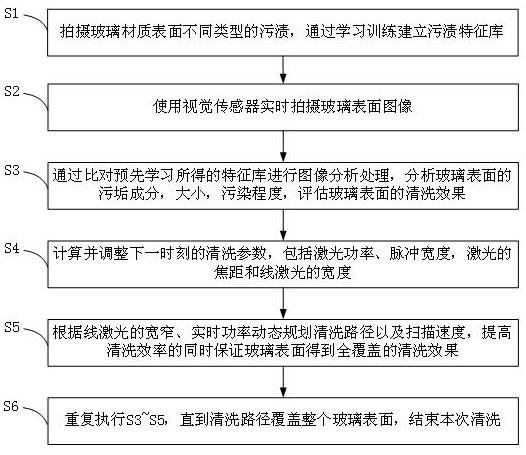
15.s1:预先拍摄玻璃材质表面不同类型的污渍,通过学习训练建立污渍特征库;
16.s2:使用视觉传感器实时拍摄玻璃表面图像;
17.s3:通过比对预先学习所得的知识库进行图像分析处理,分析玻璃表面的污垢成分,大小,污染程度,评估玻璃表面的清洗效果;
18.s4:根据步骤s3分析结果计算并调整下一时刻的清洗参数,包括激光功率和线激光的宽度;
19.s5:根据线激光的宽窄、实时功率,动态规划清洗路径以及扫描速度,进行全覆盖清洗;
20.s6:重复执行s2~s4,直到清洗路径覆盖整个玻璃表面,结束本次清洗。
21.进一步地,所述s1的玻璃材质包括玻璃窗体,玻璃幕墙,光伏面板;所述污渍的类型包括:细小灰尘,结块泥浆,动物粪便,固化水渍印记;所述污渍特征库包括污渍特征参数,所述污渍特征参数包括污渍的大小,所述污渍的大小为污垢的长度、宽度和厚度。
22.进一步地,所述s4使用窄脉宽激光的振动效应使污渍脱离玻璃表面,窄脉宽激光使物体温度升高,引起热膨胀,从而在附着面产生冲击力;在恒定激光功率的情况下,激光脉冲宽度越短,线激光宽度越短,对污垢产生的冲击力越大。
23.进一步地,所述s4包括如下具体步骤:s401:根据污垢的类型选定激光器的功率级别和线激光的宽度范围以及脉冲宽度范围划分激光功率级别后,具体的功率大小根据污垢的大小在该功率级别范围内选择,功率大小正比于污垢的大小,即a为污垢的长度、b为污垢的宽度,h为污垢的厚度;
24.s402:根据污垢在线激光扫描方向的长度,在步骤s401确定的线宽范围中选择线宽大小l,如果污垢长度a在线宽范围内则使用污垢长度a作为激光线宽,如果污垢长度a大于线宽范围l
则使用线宽上边界值l
,反之则使用下边界值l-;
25.s403:根据选定的功率大小和线宽大小l,计算激光的脉冲宽度τ。
26.本发明的一种玻璃材质表面的激光自适应清洗装置及方法具有以下优点:
27.1、本发明一种玻璃材质表面的激光自适应清洗方法,利用窄脉宽激光的振动效应,使激光与被清洗污渍相互作用产生强烈的振动冲击来清除玻璃表面的污物,不同于常规的激光除污装置利用高能量激光的烧蚀效应,使污渍受到照射达到高温,从而燃烧分解或者气化,这种烧蚀效应产生的高温有可能使得玻璃受热膨胀而碎裂。因此,本发明使用的窄脉宽激光更加安全可靠且节约能量。
28.2、本发明使用不可见光波段的激光进行玻璃清洗,避免对人类生产活动造成干扰或人身危害。
29.3、本发明通过视觉传感器获取待清洗玻璃表面的清晰图像,根据预先学习的知识库进行图像处理,识别分析污垢成分和大小,调整完成清洗所需的激光功率和线激光的宽度,确保较大的固体污垢能在大功率激光作用下清除,同时在只有灰尘的情况下降低功率,提升了激光清洗玻璃表面污垢的洁净度和清洗效率,减小了能耗。
30.4、本发明可以在线激光功率、宽窄实时变化的情况下动态规划清洗路径以及扫描速度,保证激光能扫描到整个玻璃,实现清洗路径的全覆盖。
附图说明
31.图1为本发明的玻璃材质表面的激光自适应清洗装置结构框图;
32.图2为本发明的玻璃材质表面的激光自适应清洗方法流程图;
33.图中标记说明:21、学光束组件;22、视觉传感器;23、图像处理后端;24、激光发生器;25、i/o接口;26、控制电路;27、显示界面;28、污渍;29、玻璃类表面。
具体实施方式
34.为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种玻璃材质表面的激光自适应清洗装置及方法做进一步详细的描述。
35.如图1所示,本发明的一种玻璃材质表面的激光自适应清洗装置包括光学光束组件21、视觉传感器22、图像处理后端23、激光发生器24、i/o接口25、控制电路26和显示界面27。光学光束组件21与激光发生器24连接,激光发生器24与控制电路26连接,视觉传感器22与图像处理后端23连接,图像处理后端23与控制电路26连接,显示界面27通过i/o接口25与控制电路26连接。
36.光学光束组件21用于实现激光的传导以及线激光宽度的调整。
37.激光发生器24用于发射不同功率、焦距的线激光;激光发生器24发射的为窄脉宽激光,激光脉宽在1ns~18ns,激光脉冲能量为100mj~10j,本发明利用窄脉宽激光的振动效应,通过对被照射表面在极短时间内进行激光辐射,使其在温度升高不是很大的情况下产生强烈的热弹性冲击波,从而克服污渍与玻璃介质的附着力,使污垢得到清除。不同于常规的激光除污装置利用高能量激光的烧蚀效应,使污渍受到照射达到高温,从而燃烧分解或者气化,这种烧蚀效应产生的高温有可能使得玻璃受热膨胀而碎裂。因此,本发明使用的窄脉宽激光更加安全可靠且节约能量。发射的激光处于不可见光波段,激光形状为线激光,避免了对人类生产活动造成干扰或人身危害。
38.视觉传感器22用于实时拍摄玻璃表面,获得待清洗玻璃表面的彩色图像和深度信息,并将信息传送到图像处理后端23。
39.图像处理后端23对比预先学习所得的知识库,进行图像分析识别。
40.控制电路26根据图像处理后端23的分析结果控制激光发生器24的参数及扫描速度并控制清洗装置的清洗路径和清洗次数;根据图像处理后端23识别的图像计算清洁率,根据清洁率控制清洗次数。
41.显示界面27用于显示装置工作状态、激光参数及清洁率。
42.如图2所示,本发明的一种玻璃材质表面的激光自适应清洗方法,包括如下步骤:
43.s1:预先拍摄玻璃材质(包括玻璃窗体,玻璃幕墙,光伏面板等)表面不同类型的污渍,通过学习训练建立污渍特征库。玻璃材质表面的污渍类型包括:细小灰尘,结块泥浆,动物粪便,固化水渍印记等;污渍的特征参数包括:污渍的大小(长度、宽度和厚度)。
44.s2:使用视觉传感器实时拍摄玻璃表面图像;
45.s3:通过比对预先学习所得的知识库进行图像分析处理,分析玻璃表面的污垢成分,大小,污染程度,评估玻璃表面的清洗效果;
46.s4:根据步骤s3分析结果计算并调整下一时刻的清洗参数,包括激光功率和线激光的宽度;本发明中使用的窄脉宽激光的振动效应使污渍脱离玻璃表面,窄脉宽激光使物
体温度升高,引起热膨胀,从而在附着面产生冲击力。当冲击力大于污垢粘附力时污物就被清除。在这个过程中,污垢热膨胀的长度δl=γδtl,式中γ为热膨胀系数,l为污垢的长度,δt为升高的温度,根据加速度近似求解公式可知污垢膨胀过程产生的冲击力可知污垢膨胀过程产生的冲击力式中m为污垢的质量,τ为激光的脉冲宽度。温度的升高量与污垢表面照射激光的能量密度成正比,即δt
∝
i,而式中i为激光器发射的能量密度,为激光器的功率,l为线激光的宽度。从而可知即冲击力与激光器功率成正比,与脉冲宽度和线激光的宽度成反比。由此可见,在恒定激光功率的情况下,激光脉冲宽度越短,线激光宽度越短,则对污垢产生的冲击力越大,越容易清洗污垢。
47.根据上述窄脉宽激光原理和公式,具体计算和调整激光清洗参数过程如下:
48.s401:根据污垢的类型选定激光器的功率级别和线激光的宽度范围以及脉冲宽度范围固体污垢设定更高的功率级别和更短的线宽范围和更窄的激光脉冲宽度,保证较高的功率密度。相对的,细微灰尘只需设定较低的功率级别,较长的线激光宽度范围和较长的激光脉冲宽度范围,在一个较低的功率密度下工作。划分激光功率级别后,具体的功率大小根据污垢的大小(长度a,宽度b和厚度h)在该功率级别范围内选择,功率大小正比于污垢的大小,即
49.s402:根据污垢在线激光扫描方向的长度,在步骤s401确定的线宽范围中选择合适的线宽大小l。如果污垢长度a在线宽范围内则使用污垢长度a作为激光线宽,如果污垢长度a大于线宽范围l
则使用线宽上边界值l
,反之则使用下边界值l-。
50.s403:根据选定的功率大小和线宽大小l,计算激光的脉冲宽度τ。
51.s5:根据线激光的宽窄、实时功率,动态规划清洗路径以及扫描速度,提高清洗效率的同时保证玻璃表面得到全覆盖的清洗效果;
52.s6:重复执行s2~s4,直到清洗路径覆盖整个玻璃表面,结束本次清洗。
53.实施例:
54.如图1所示,玻璃类表面29上存在分布不均匀、厚度大小不一、成分不同的污渍。视觉传感器22首先对整个玻璃表面进行拍摄,经过图像处理后端23来确定整个清理区域的大小,并初步规划全局路径,随后反馈给控制电路26控制清洗装置移动到左上角区域,开始激光清洗作业。其中,激光能量密度的初始参数为3j/cm2,激光搭接率为20%,激光功率为35w,重复频率为840khz,扫描速度为8470mm/s,激光脉宽为100ns,线激光宽度为2cm。此时,视觉传感器22实时拍摄特定范围的玻璃表面,通过图像处理后端23对比预先学习所得的知识库,进行图像分析识别,以污渍28为例,若被识别为结块泥浆,厚度小于0.5mm,直径小于5mm,则将识别结果反馈给控制电路26,调整相应的激光参数,激光的能量密度为8j/cm2,激光搭接率为60%,激光功率为42w,重复频率为369khz,扫描速度为8470mm/s,激光脉宽为100ns,线激光宽度为0.5cm,清洗次数为1次。其中,光学光束组件21负责实现激光的传导以及线激光宽度的调整。完成1次扫描清洗后,控制电路26对该区域的清洗效果进行像素级评
估,计算清洁率(清洁区域像素点/总清洗区域像素点),大于90%则达到要求。在清洗不同污渍的过程中,根据线激光的宽窄、功率等参数,控制电路26会动态调整扫描速度和清洗路径,并通过i/o接口25显示在显示界面27上。重复以上步骤直至整个玻璃的右下角,保证玻璃表面的全覆盖,并将最终的全局清洁率显示在显示界面27上,整个清洗过程结束。
55.上述实施例仅仅介绍了以结块泥浆为污渍代表的激光清洗参数,其他不同类型的污渍也有各自对应的参数,这里列举三种常见的玻璃污渍,具体如表1所示:
56.表1玻璃材质表面不同类型的污渍所对应的激光清洗参数表
[0057][0058]
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本发明所保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。