1.本发明涉及激光测距技术领域,具体而言,涉及一种基于脉宽补偿的激光测距方法及系统。
背景技术:
2.近年来激光雷达以其高精度、体积小、测距远、抗干扰能力强等优点已广泛应用于海洋探测、森林资源监测、地形测绘、机器人以及无人机等领域,更是成为自动驾驶中不可缺少的传感器之一。激光雷达通过计算发射激光的时刻与接收到回波散射光时刻的光飞行时间差来实现测距功能。
3.由于自然界中的不同类型的物体所特有的电磁性质不同,因此它们对入射光的吸收和反射强度也不同。即当一定强度的激光脉冲打到不同的目标物体上,其反射光的强度是不相同的,通常反射光的强度用反射率表示。对于脉冲测距激光雷达而言,同一脉冲激光能量,同一距离下,目标物体的反射率不同,回波能量会不同;同一反射率,不同距离下,由于光路损耗,回波能量也会不同。因此在实际的激光测距过程中,回波信号的幅值就会出大的动态变化,即有的回波信号由于反射光太强出现饱和,有的回波信号由于反射光较弱不饱和。回波信号的动态变化导致光飞行时间计算出现误差,最终影响了激光测距的准确性。
技术实现要素:
4.本发明解决的问题是如何覆盖大测量范围与大反射率变化的激光测距场景,消除回波大动态变化造成的飞行时间误差,使激光雷达实现大动态范围测量。
5.为解决上述问题,本发明提供一种基于脉宽补偿的激光测距方法,包括步骤:
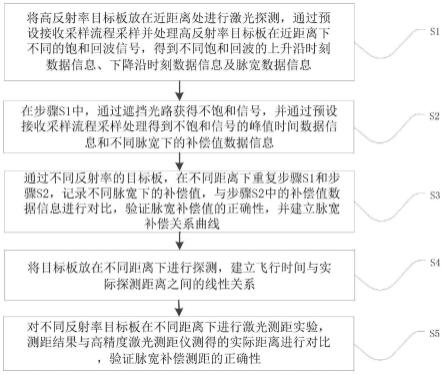
6.s1:将高反射率目标板放在近距离处进行激光探测,通过预设接收采样流程采样并处理高反射率目标板在近距离下不同的饱和回波信号,得到不同饱和回波的上升沿时刻数据信息、下降沿时刻数据信息及脉宽数据信息;
7.s2:在步骤s1中,通过遮挡光路获得不饱和信号,并通过预设接收采样流程采样处理得到不饱和信号的峰值时间数据信息和不同脉宽下的补偿值数据信息;
8.s3:通过不同反射率的目标板,在不同距离下重复步骤s1和步骤s2,记录不同脉宽下的补偿值,与步骤s2中的补偿值数据信息进行对比,验证脉宽补偿值的正确性,并建立脉宽补偿关系曲线;
9.s4:将目标板放在不同距离下进行探测,建立飞行时间与实际探测距离之间的线性关系;
10.s5:对不同反射率目标板在不同距离下进行激光测距实验,测距结果与高精度激光测距仪测得的实际距离进行对比,验证脉宽补偿测距的正确性。
11.在上述方法中,针对回波不饱和信号,该方法通过滤波、拟合等数字信号处理算法,提取不饱和信号的峰值位置,并将峰值时刻认定为探测目标在该距离下的激光飞行时间。针对回波饱和信号,该方法通过设定相应阈值,首先获取回波信号的上升沿时刻、下降
沿时刻及脉冲宽度,然后将该探测目标在同一距离下基于不饱和信号获得的飞行时间减去饱和信号的上升沿时刻,即获得该饱和回波信号在该脉宽下的补偿值。根据探测目标回波脉宽读取表中补偿值进行飞行时间补偿,最终得到不同饱和程度的回波信号的正确飞行时间,从而实现大动态范围的激光测量。
12.进一步地,所述步骤s1中的预设接收采样流程包括:
13.s11:通过apd对回波光信号进行接收并转化成电流信号,电流信号经跨阻放大器转化成电压信号;
14.s12:经过二级放大器放大,通过adc对回波电压信号进行数字采集,采集到的数字信号在主控芯片中进行重建及处理。
15.进一步地,所述步骤s2包括:
16.s21:通过滤波、拟合数字信号处理提取不饱和信号的峰值位置数据信息,并将峰值时间数据信息认定为探测目标在该距离下的激光飞行时间;
17.s22:通过设定相应阈值,获取回波信号的上升沿时刻数据信息、下降沿时刻数据信息及脉宽数据信息,将探测目标在同一距离下基于不饱和信号获得的飞行时间减去饱和信号的上升沿时刻,得到该饱和回波信号在该脉宽下的补偿值。
18.进一步地,所述步骤s4包括:
19.s41:通过将饱和信号的上升沿时刻加上脉宽下的补偿值得到正确的激光飞行时间;
20.s42:基于不饱和信号通过信号处理算法获得正确飞行时间和饱和信号通过上升沿时刻加上脉宽补偿值获得飞行时刻,不同饱和程度的回波信号均获得了正确的激光飞行时间。
21.在上述方法中,饱和信号的上升沿时间加上该脉宽下的补偿值,即可获得正确的激光飞行时间。即不饱和信号通过信号处理算法获得正确飞行时间,饱和信号通过上升沿时刻加上脉宽补偿值获得飞行时刻,基于此,不同饱和程度的回波信号均获得了正确的激光飞行时间,最终建立起实际探测距离与激光飞行时间之间的关系。
22.一种基于脉宽补偿的激光测距系统,包括:
23.第一回波信号接收模块:用于根据预设接收采样流程采样并处理高反射率目标板在近距离下不同的饱和回波信号,得到不同饱和回波的上升沿时刻数据信息、下降沿时刻数据信息及脉宽数据信息;
24.第二回波信号接收模块:用于根据遮挡光路获得不饱和信号,并通过预设接收采样流程采样处理得到不饱和信号的峰值时间数据信息和不同脉宽下的补偿值数据信息;
25.第一执行模块:用于在不同反射率的目标板和在不同距离下重复执行第一回波信号接收模块和第二回波信号接收模块,记录不同脉宽下的补偿值,与第二回波信号接收模块中的补偿值数据信息进行对比,验证脉宽补偿值的正确性,并建立脉宽补偿关系曲线;
26.建立模块:用于将目标板放在不同距离下进行探测,建立飞行时间与实际探测距离之间的线性关系;
27.第二执行模块:用于对不同反射率目标板在不同距离下进行激光测距实验,测距结果与高精度激光测距仪测得的实际距离进行对比,验证脉宽补偿测距的正确性。
28.进一步地,所述预设接收采样流程包括:
29.apd单元:用于对回波光信号进行接收并转化成电流信号,电流信号经跨阻放大器转化成电压信号;
30.adc单元:经过二级放大器放大,用于对回波电压信号进行数字采集,采集到的数字信号在主控芯片中进行重建及处理。
31.进一步地,所述第二回波信号接收模块包括:
32.第一处理单元:用于通过滤波、拟合数字信号处理提取不饱和信号的峰值位置数据信息,并将峰值时间数据信息认定为探测目标在该距离下的激光飞行时间;
33.第二处理单元:通过设定相应阈值,获取回波信号的上升沿时刻数据信息、下降沿时刻数据信息及脉宽数据信息,将探测目标在同一距离下基于不饱和信号获得的飞行时间减去饱和信号的上升沿时刻,得到该饱和回波信号在该脉宽下的补偿值。
34.进一步地,所述建立模块包括:
35.第三处理单元:用于将饱和信号的上升沿时刻加上脉宽下的补偿值得到正确的激光飞行时间;
36.第四处理单元:基于不饱和信号通过信号处理算法获得正确飞行时间和饱和信号通过上升沿时刻加上脉宽补偿值获得飞行时刻,不同饱和程度的回波信号均获得了正确的激光飞行时间。
37.本发明采用上述技术方案包括以下有益效果:
38.本发明在实际的激光测距过程中,该方法需要对不同回波脉宽进行标定,获取不同脉宽下的补偿值,建立脉宽补偿曲线。脉宽的标定过程可采用不同反射率标准板移动不同距离来获得不同脉宽下补偿值,或可采用遮挡光路的方式获得不同脉宽下的补偿值,建立脉宽与补偿值对应的关系。将补偿数据存储在主控内存中,根据探测目标回波脉宽读取表中补偿值进行飞行时间补偿,最终得到不同饱和程度的回波信号的正确飞行时间,从而实现大动态范围的激光测量。
附图说明
39.图1为本发明实施例一提供的基于脉宽补偿的激光测距方法流程图一;
40.图2为本发明实施例一提供的基于脉宽补偿的激光测距方法流程图二;
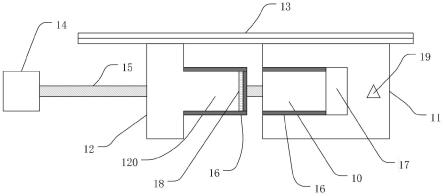
41.图3为本发明实施例一提供的基于脉宽补偿的激光测距方法的回波信号接收的结构示意图;
42.图4为本发明实施例一提供的基于脉宽补偿的激光测距方法的饱和信号和不饱和信号的示意图一;
43.图5为本发明实施例一提供的基于脉宽补偿的激光测距方法的饱和信号和不饱和信号的示意图二;
44.图6为本发明实施例二提供的基于脉宽补偿的激光测距系统结构图一;
45.图7为本发明实施例二提供的基于脉宽补偿的激光测距系统结构图二。
具体实施方式
46.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
47.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
48.实施例一
49.本实施例提供了一种基于脉宽补偿的激光测距方法,如图1至图5所示,本方法包括步骤:
50.s1:将高反射率目标板放在近距离处进行激光探测,通过预设接收采样流程采样并处理高反射率目标板在近距离下不同的饱和回波信号,得到不同饱和回波的上升沿时刻数据信息、下降沿时刻数据信息及脉宽数据信息;
51.s2:在步骤s1中,通过遮挡光路获得不饱和信号,并通过预设接收采样流程采样处理得到不饱和信号的峰值时间数据信息和不同脉宽下的补偿值数据信息;
52.s3:通过不同反射率的目标板,在不同距离下重复步骤s1和步骤s2,记录不同脉宽下的补偿值,与步骤s2中的补偿值数据信息进行对比,验证脉宽补偿值的正确性,并建立脉宽补偿关系曲线;
53.s4:将目标板放在不同距离下进行探测,建立飞行时间与实际探测距离之间的线性关系;
54.s5:对不同反射率目标板在不同距离下进行激光测距实验,测距结果与高精度激光测距仪测得的实际距离进行对比,验证脉宽补偿测距的正确性。
55.参阅图2和图3所示,其中,步骤s1中的预设接收采样流程包括:
56.s11:通过apd对回波光信号进行接收并转化成电流信号,电流信号经跨阻放大器转化成电压信号;
57.s12:经过二级放大器放大,通过adc对回波电压信号进行数字采集,采集到的数字信号在主控芯片中进行重建及处理。
58.具体的,首先采用apd对微弱的回波光信号进行接收并转化成电流信号,电流信号经跨阻放大器转化成电压信号,后经二级放大器进一步放大,然后采用adc(高速模数转换器)对回波电压信号进行数字采集,采集到的数字信号在主控芯片中进行重建及处理。
59.参阅图4所示,由于探测目标的距离和反射率存在变化,回波信号的幅值会出现大动态变化,通常可分为饱和信号和不饱和信号。
60.参阅图2所示,其中,步骤s2包括:
61.s21:通过滤波、拟合数字信号处理提取不饱和信号的峰值位置数据信息,并将峰值时间数据信息认定为探测目标在该距离下的激光飞行时间;
62.s22:通过设定相应阈值,获取回波信号的上升沿时刻数据信息、下降沿时刻数据信息及脉宽数据信息,将探测目标在同一距离下基于不饱和信号获得的飞行时间减去饱和信号的上升沿时刻,得到该饱和回波信号在该脉宽下的补偿值。
63.其中,步骤s4包括:
64.s41:通过将饱和信号的上升沿时刻加上脉宽下的补偿值得到正确的激光飞行时间;
65.s42:基于不饱和信号通过信号处理算法获得正确飞行时间和饱和信号通过上升沿时刻加上脉宽补偿值获得飞行时刻,不同饱和程度的回波信号均获得了正确的激光飞行时间。
66.参阅图5所示,具体的,针对回波不饱和信号,该方法通过滤波、拟合等数字信号处理算法,提取不饱和信号的峰值位置,并将峰值时刻t
p
认定为探测目标在该距离下的激光飞行时间。针对回波饱和信号,该方法通过设定相应阈值,首先获取回波信号的上升沿时刻tr、下降沿时刻tf及脉冲宽度t
pw
,然后将该探测目标在同一距离下基于不饱和信号获得的飞行时间减去饱和信号的上升沿时刻,即获得该饱和回波信号在该脉宽下的补偿值t
cv
。饱和信号的上升沿时间加上该脉宽下的补偿值,即可获得正确的激光飞行时间。不饱和信号通过信号处理算法获得正确飞行时间,饱和信号通过上升沿时刻加上脉宽补偿值获得飞行时刻,不同饱和程度的回波信号均获得了正确的激光飞行时间,最终建立起实际探测距离与激光飞行时间之间的关系。
67.本方法在实际的激光测距过程中,该方法需要对不同回波脉宽进行标定,获取不同脉宽下的补偿值,建立脉宽补偿曲线。脉宽的标定过程可采用不同反射率标准板移动不同距离来获得不同脉宽下补偿值,或可采用遮挡光路的方式获得不同脉宽下的补偿值,建立脉宽与补偿值对应的关系。将补偿数据存储在主控内存中,根据探测目标回波脉宽读取表中补偿值进行飞行时间补偿,最终得到不同饱和程度的回波信号的正确飞行时间,从而实现大动态范围的激光测量。
68.实施例二
69.本实施例提供了一种基于脉宽补偿的激光测距系统,如图6和图7所示,本系统包括:
70.第一回波信号接收模块:用于根据预设接收采样流程采样并处理高反射率目标板在近距离下不同的饱和回波信号,得到不同饱和回波的上升沿时刻数据信息、下降沿时刻数据信息及脉宽数据信息;
71.第二回波信号接收模块:用于根据遮挡光路获得不饱和信号,并通过预设接收采样流程采样处理得到不饱和信号的峰值时间数据信息和不同脉宽下的补偿值数据信息;
72.第一执行模块:用于在不同反射率的目标板和在不同距离下重复执行第一回波信号接收模块和第二回波信号接收模块,记录不同脉宽下的补偿值,与第二回波信号接收模块中的补偿值数据信息进行对比,验证脉宽补偿值的正确性,并建立脉宽补偿关系曲线;
73.建立模块:用于将目标板放在不同距离下进行探测,建立飞行时间与实际探测距离之间的线性关系;
74.第二执行模块:用于对不同反射率目标板在不同距离下进行激光测距实验,测距结果与高精度激光测距仪测得的实际距离进行对比,验证脉宽补偿测距的正确性。
75.参阅图7所示,其中,预设接收采样流程包括:
76.apd单元:用于对回波光信号进行接收并转化成电流信号,电流信号经跨阻放大器转化成电压信号;
77.adc单元:经过二级放大器放大,用于对回波电压信号进行数字采集,采集到的数字信号在主控芯片中进行重建及处理。
78.其中,第二回波信号接收模块包括:
79.第一处理单元:用于通过滤波、拟合数字信号处理提取不饱和信号的峰值位置数据信息,并将峰值时间数据信息认定为探测目标在该距离下的激光飞行时间;
80.第二处理单元:通过设定相应阈值,获取回波信号的上升沿时刻数据信息、下降沿
时刻数据信息及脉宽数据信息,将探测目标在同一距离下基于不饱和信号获得的飞行时间减去饱和信号的上升沿时刻,得到该饱和回波信号在该脉宽下的补偿值。
81.其中,建立模块包括:
82.第三处理单元:用于将饱和信号的上升沿时刻加上脉宽下的补偿值得到正确的激光飞行时间;
83.第四处理单元:基于不饱和信号通过信号处理算法获得正确飞行时间和饱和信号通过上升沿时刻加上脉宽补偿值获得飞行时刻,不同饱和程度的回波信号均获得了正确的激光飞行时间。
84.本系统在实际的激光测距过程中,需要对不同回波脉宽进行标定,获取不同脉宽下的补偿值,建立脉宽补偿曲线。脉宽的标定过程可采用不同反射率标准板移动不同距离来获得不同脉宽下补偿值,或可采用遮挡光路的方式获得不同脉宽下的补偿值,建立脉宽与补偿值对应的关系。将补偿数据存储在主控内存中,根据探测目标回波脉宽读取表中补偿值进行飞行时间补偿,最终得到不同饱和程度的回波信号的正确飞行时间,从而实现大动态范围的激光测量。
85.虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员,在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。