技术特征:
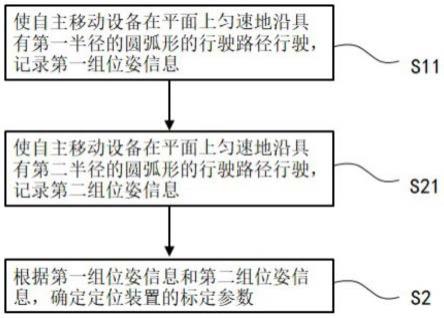
1.一种用于标定自主移动设备的定位装置的定位装置标定方法,其中,所述定位装置固定地安装在自主移动设备上并设置成能够输出定位装置的位姿信息,其中,所述定位装置标定方法包括以下步骤:使自主移动设备在平面上匀速地沿具有互不相等的半径的圆弧形的至少两条运动路径运动,其中,在沿每条运动路径运动的过程中,分别在一组至少两个不同的测量时刻记录由定位装置输出的一组位姿信息;以及根据定位装置输出的至少两组位姿信息,确定定位装置的标定参数,其中,定位装置的标定参数表示定位装置在自主移动设备中的位置和方向。2.根据权利要求1所述的定位装置标定方法,其中,定位装置的标定参数包括定位装置的坐标系原点在自主移动设备的坐标系下的横坐标
r
x
s
和纵坐标
r
y
s
以及定位装置的坐标系相对于自主移动设备的坐标系的角度θ
s
。3.根据权利要求1所述的定位装置标定方法,其中,定位装置的标定参数利用运动过程中定位装置在自主移动设备上的位姿保持不变的性质来确定。4.根据权利要求1-3中任一项所述的定位装置标定方法,其中,各组测量时刻的数量分别大于2;和/或运动路径为一个完整的圆周。5.根据权利要求2所述的定位装置标定方法,其中,位姿信息表示定位装置在世界坐标系中的位姿。6.根据权利要求5所述的定位装置标定方法,其中,定位装置的坐标系原点在自主移动设备的坐标系下的横坐标
r
x
s
和纵坐标
r
y
s
根据所述至少两组位姿信息利用以下公式得出:其中,和分别表示在第k 1个测量时刻定位装置在世界坐标系中的横、纵坐标和姿态角,k>0,θ0表示在第1个测量时刻自主移动设备在世界坐标系中的姿态角,θ
k_0
表示自主移动设备从第1个测量时刻到第k 1个测量时刻的转动角,ρ表示自主移动设备的运动路径的半径。7.根据权利要求6所述的定位装置标定方法,其中,定位装置的坐标系相对于自主移动设备的坐标系的角度θ
s
通过以下公式得出:θ
k
=θ0 θ
k_0
其中,θ
k
表示在第k 1个测量时刻自主移动设备在世界坐标系中的姿态角。
8.根据权利要求2所述的定位装置标定方法,其中,位姿信息表示定位装置在各组测量时刻中的第1个测量时刻的定位装置的坐标系中的位姿。9.根据权利要求8所述的定位装置标定方法,其中,定位装置的标定参数
r
x
s
、
r
y
s
和θ
s
根据所述至少两组位姿信息利用以下公式得出:据所述至少两组位姿信息利用以下公式得出:其中,和分别表示在第k 1个测量时刻定位装置在相应的第1个测量时刻的定位装置的坐标系中的横、纵坐标和姿态角,k>0,θ
(k-1)_0
表示自主移动设备从第1个测量时刻到第k个测量时刻的转动角,θ
k_(k-1)
表示自主移动设备从第k个测量时刻到第k 1个测量时刻的转动角,ρ表示自主移动设备的运动路径的半径。10.根据权利要求2所述的定位装置标定方法,其中,位姿信息表示定位装置在各组测量时刻中的前一测量时刻的定位装置的坐标系中的位姿。11.根据权利要求10所述的定位装置标定方法,其中,定位装置的标定参数
r
x
s
、
r
y
s
和θ
s
根据所述至少两组位姿信息利用以下公式得出:其中,和分别表示在第k 1个测量时刻定位装置在第k个测量时刻的定位装置的坐标系中的横、纵坐标和姿态角,时刻的定位装置的坐标系中的横、纵坐标和姿态角,和分别表示在第k个测量时刻定位装置在第k个测量时刻的定位装置的坐标系中的横、纵坐标和姿态角,k>0,θ
k_(k-1)
表示自主移动设备从第k个测量时刻到第k 1个测量时刻的转动角,ρ表示自主移动设备的运动路径的半径。12.根据权利要求10所述的定位装置标定方法,其中,各组测量时刻的数量分别大于2,
每组测量时刻的间隔时间相等。13.根据权利要求12所述的定位装置标定方法,其中,定位装置的标定参数
r
x
s
、
r
y
s
和θ
s
根据所述至少两组位姿信息利用以下公式得出:其中,和分别表示在第k 1个测量时刻定位装置在第k个测量时刻的定位装置的坐标系中的横、纵坐标和姿态角,时刻的定位装置的坐标系中的横、纵坐标和姿态角,和分别表示在第k个测量时刻定位装置在第k个测量时刻的定位装置的坐标系中的横、纵坐标和姿态角,k>0,等式左边表示两个测量时刻之间的位姿变化的平均值,θ
k_(k-1)
表示自主移动设备从第k个测量时刻到第k 1个测量时刻的转动角,ρ表示自主移动设备的运动路径的半径。14.根据权利要求1-3、5-13中任一项所述的定位装置标定方法,其中,所述至少两条运动路径包括至少三条运动路径。15.根据权利要求14所述的定位装置标定方法,其中,通过优化目标函数确定定位装置的标定参数,所述目标函数使得在所有具有不同半径的运动路径下计算结果的总误差最小。16.根据权利要求14所述的定位装置标定方法,其中,将所述至少三条运动路径分为分别包括两条运动路径的多组运动路径,针对每组运动路径所对应的位姿信息进行处理并确定处理结果的标准差和均值。17.根据权利要求16所述的定位装置标定方法,其中,如果标准差较大,则重新进行标定。18.一种用于标定自主移动设备的里程计的里程计标定方法,其中,所述自主移动设备具有差速轮运动系统,所述里程计标定方法包括:利用安装在自主移动设备上的定位装置进行自动标定,其中,通过根据权利要求1-17中任一项所述的定位装置标定方法标定所述定位装置。19.根据权利要求18所述的里程计标定方法,其中,里程计的标定参数包括自主移动设备的左轮半径r
l
、右轮半径r
r
和轮距b,左轮半径r
l
、右轮半径r
r
和轮距b利用以下公式得出:
其中,ω表示自主移动设备的坐标系的角速度,ω
r
和ω
l
分别表示左轮的角速度和右轮的角速度;和/或里程计的标定参数与定位装置的标定参数一起在定位装置标定方法的步骤s2中被确定。20.根据权利要求18所述的里程计标定方法,其中,在一组总数量大于2的测量时刻之间间隔相等的时间t的情况下,利用以下公式计算里程计的标定参数和/或定位装置的标定参数。θ
k_(k-1)
=t
·
ω其中,θ
k_(k-1)
表示自主移动设备从第k个测量时刻到第k 1个测量时刻的转动角。21.一种计算机程序产品,其包括计算器程序指令,其中,当所述计算机程序指令被一个或多于一个处理器执行时,所述处理器(10)能够执行根据权利要求1-17中任一项所述的定位装置标定方法或根据权利要求18-20中任一项所述的里程计标定方法。22.一种标定装置,所述装置包括处理器(10)和与处理器(10)通信连接的计算机可读存储装置(20),计算机可读存储装置(20)中存储有计算机程序,当所述计算机程序被处理器(10)执行时,用于实施根据权利要求1-17中任一项所述的定位装置标定方法或根据权利要求18-20中任一项所述的里程计标定方法。
技术总结
本发明提出一种用于标定自主移动设备的定位装置的定位装置标定方法,定位装置固定地安装在自主移动设备上并能够输出位姿信息,定位装置标定方法包括:使自主移动设备在平面上匀速地沿具有互不相等的半径的圆弧形的至少两条运动路径运动,其中,在沿每条运动路径运动的过程中,分别在一组至少两个不同的测量时刻记录由定位装置输出的一组位姿信息;以及根据定位装置输出的至少两组位姿信息,确定定位装置的标定参数,其中,定位装置的标定参数表示定位装置在自主移动设备中的位置和方向。本发明还涉及一种用于标定自主移动设备的里程计的里程计标定方法、一种计算机程序产品及一种标定装置。借助于本发明,能够高效且准确地标定定位装置和里程计。标定定位装置和里程计。标定定位装置和里程计。
技术研发人员:赵安 毛玉良 边铁栋 董政胤 吴锦河 武家弘
受保护的技术使用者:灵动科技(北京)有限公司
技术研发日:2021.05.13
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。