技术特征:
1.一种多余度电机伺服控制系统,其特征在于,系统包括:处理器a、处理器b和双端口ram,所述双端口ram连接处理器a和处理器b;所述处理器a和处理器b中嵌入有前馈式三闭环控制方法;所述处理器a为主处理器,在无故障时,主处理器控制电机工作;当出现故障时,由处理器b接管控制电机工作;若b处理器故障,则进入故障安全状态,此时所有输出均变为低电平;所述的前馈式三闭环控制方法采用角度pid控制环、转速pid控制环和电流pid控制环实现,方法包括:实时采集减速器角度,将减速器当前角度与当前设定角度做差后,所得当前角度差值作为角度pid控制环的输入,角度pid控制环利用角度差值计算转速;角度pid控制环周期性输出转速计算结果;实时采集电机转速,将电机当前转速与当前转速计算结果做差,所得当前转速差值作为转速pid控制环的输入,转速pid控制环利用转速差值计算电流;转速pid控制环周期性输出电流计算结果;实时采集电机电流,将电机当前电流与当前电流计算结果做差,所得当前电流差值作为电流pid控制环的输入,电流pid控制环利用电流差值计算占空比;电流pid控制环周期性输出占空比计算结果作为伺服电机控制信号;所述电流pid控制环的控制算法为:其中:k表示当前时刻所在的电流pid控制环的第k个输出周期,k取自然数;u(k)表示电流pid控制环的第k个输出周期的输出值;e(k)为计算u(k)用的电流差值;e(k-1)为计算u(k-1)用的电流差值,e(k-1)初始为0;j=0,1,2,
…
,k;q表示当前时刻所在的角度pid控制环的第q个输出周期,q取自然数;possv(q)表示角度pid控制环的第q个输出周期输出值计算时所用的设定角度,初始时,possv(q-1)取0;k
b
表示前馈项系数,70≤k
b
≤150;k
p
表示电流pid控制环的当前比例系数;k
i
表示电流pid控制环的当前积分系数;k
d
表示电流pid控制环的当前微分系数。2.如权利要求1所述的多余度电机伺服控制系统,其特征在于,所述角度pid控制环的输出周期为5~10ms;转速pid控制环的输出周期为1~5ms;电流pid控制环的输出周期为0.05~0.1ms。3.如权利要求1所述的多余度电机伺服控制系统,其特征在于,方法还包括:根据当前角度差值与第一阈值的大小选择角度pid控制环的参数后计算转速,所述根
据当前角度差值与第一阈值的大小选择角度pid控制环的参数包括:当前角度差值大于等于第一阈值时角度pid控制环k
p
的取值大于当前角度差值小于第一阈值时角度pid控制环k
p
的取值,当前角度差值大于等于第一阈值时角度pid控制环k
i
的取值小于当前角度差小于第一阈值时角度pid控制环k
i
的取值,且,角度pid控制环的k
p
的取值范围为[10,50]、角度pid控制环k
i
的取值范围为[0,1]、角度pid控制环k
d
的取值范围为[0,0.1];根据当前转速差值与第二阈值的大小关系选择转速pid控制环的参数后计算电流,所述根据当前转速差值与第二阈值的大小关系选择转速pid控制环的参数包括:当前转速差值大于等于第二阈值时转速pid控制环k
p
的取值大于当前转速差值小于第二阈值时转速pid控制环k
p
的取值,当前转速差值大于等于第二阈值时转速pid控制环k
i
的取值大于当前转速差值小于第二阈值时转速pid控制环k
i
的取值,且,转速pid控制环的k
p
的取值范围为[0.5,10]、转速pid控制环k
i
的取值范围为[0,1]、转速pid控制环k
d
的取值范围为[0,0.1];根据当前电流差值与第三阈值的大小关系选择电流pid控制环的参数后计算占空比,所述根据当前电流差值与第三阈值的大小关系选择电流pid控制环的参数包括:当前电流差值大于等于第三阈值时电流pid控制环k
p
的取值大于当前电流差值小于第三阈值时电流pid控制环k
p
的取值;当前电流差值大于等于第三阈值时电流pid控制环k
i
的取值小于当前电流差值小于第三阈值时电流pid控制环k
i
的取值,且,电流pid控制环的k
p
的取值范围为[0,1]、电流pid控制环k
i
的取值范围为[0,1]、电流pid控制环k
d
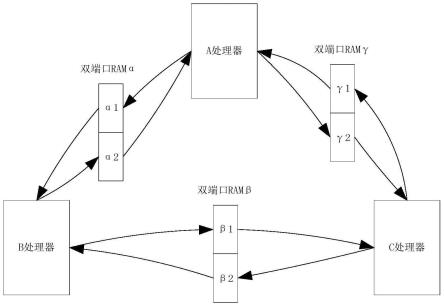
的取值范围为[0,0.1]。4.如权利要求1所述的多余度电机伺服控制系统,其特征在于,对所述当前角度、当前设定角度分别归一化后求取归一化值的差值作为当前角度差值;对所述当前转速计算结果与采集到的电机当前转速分别归一化后求取归一化值的差值作为当前转速差值;对所述当前电流计算结果与采集到的电机当前电流分别归一化后求取归一化值的差值作为当前电流差值。5.如权利要求1所述的多余度电机伺服控制系统,其特征在于,系统包括:处理器a、处理器b、处理器c、双端口ramα、双端口ramβ和双端口ramγ,所述双端口ramα连接处理器a和处理器b,双端口ramβ连接处理器a和处理器c,双端口ramγ连接处理器b和处理器c;所述处理器a、处理器b和处理器c中嵌入有前馈式三闭环控制方法;所述处理器a、处理器b和处理器c中处理器a为主处理器,在无故障时,主处理器控制电机工作;当出现故障时,由处理器b接管控制电机工作;若b处理器故障,则由c处理器接管;若c处理器也故障则进入故障安全状态,此时所有输出均变为低电平。6.如权利要求1所述的多余度电机伺服控制系统,其特征在于,各处理器周期性进行数据交互,控制处理器输出控制信号,其它处理器依据控制处理器给出的数据进行计算,但不输出控制信号。7.如权利要求1所述的多余度电机伺服控制系统,其特征在于,各处理器交互数据的周
期与电流pid控制环的输出周期一致。8.如权利要求1所述的多余度电机伺服控制系统,其特征在于,当发生故障时,非控制处理器中角度pid控制环和电流pid控制环两个控制环的参数k
p
、k
i
、k
d
取故障过渡值,故障发生一段时间后恢复为故障发生前的参数取值,所述两个控制环的参数取故障过渡值为:角度pid控制环的参数k
p
、k
i
、k
d
均取0;电流pid控制环的参数k
p
取值较故障发生前的k
p
取值变小、k
i
取值较故障发生前的k
i
取值变大,且电流pid控制环的k
p
的取值范围为[0,1]、k
i
的取值范围为[0,1]、k
d
不变或取值范围为[0,0.1]。
技术总结
本发明公开了一种采用多余度电机伺服控制系统。所公开的控制系统系统包括处理器A、处理器B和双端口RAM,所述双端口RAM连接处理器A和处理器B;控制系统基于双端口RAM的数据传输方法和三闭环控制方法,实现了备份处理器实时获取主机处理器工作数据的能力;同时采用分时PID方法,解决了处理器切换时,电机控制性能下降的问题。降的问题。降的问题。
技术研发人员:于洋 徐中节 魏京芳 徐漫飞 孙海智 董国创 孙超
受保护的技术使用者:西安航天远征流体控制股份有限公司
技术研发日:2022.07.26
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。