技术特征:
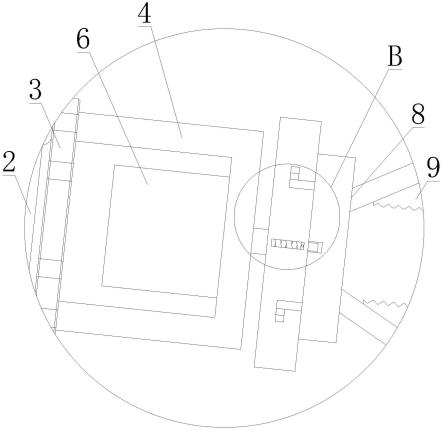
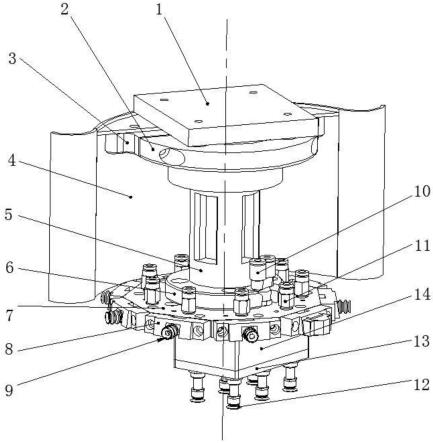
1.一种机械手式热镀锌上料机器人,其特征在于,包括底座(1)、机器人本体(2)、安装板(3)、支撑架(4)、卡盘(7)、抓手本体(8)和用于将抓手本体(8)固定在卡盘(7)上的弹性组件;机器人本体(2)设置在底座(1)上;安装板(3)设置在机器人本体(2)上;支撑架(4)设置在安装板(3)横向一侧;卡盘(7)设置在支撑架(4)横向一侧,卡盘(7)远离支撑架(4)的横向一侧对称设置有两个卡槽(701),卡槽(701)外侧内壁上设置有勾槽(702),勾槽(702)与卡槽(701)形成l型槽结构,卡盘(7)内设置有空腔(703),空腔(703)位于卡盘(7)中心,空腔(703)位于两个卡槽(701)之间;抓手本体(8)卡接设置在卡盘(7)上,抓手本体(8)横向一侧对称设置有两个卡块(801),卡块(801)外侧设置有勾块,抓手本体(8)与卡盘(7)滑动连接,卡块(801)位于卡槽(701)内,勾块(802)位于勾槽(702)内,抓手本体(8)横向一侧中心处设置有限位孔(803);弹性组件位于空腔(703)内,弹性组件与抓手本体(8)滑动连接,弹性组件插入限位孔(803)内。2.根据权利要求1所述的一种机械手式热镀锌上料机器人,其特征在于,弹性组件包括移动块(10)、限位柱(11)和复位弹簧(12);移动块(10)滑动设置在空腔(703)内,移动块(10)沿横向滑动;限位柱(11)贯穿卡盘(7)远离支撑架(4)的横向一侧设置在移动块(10)上,限位柱(11)与卡盘(7)和抓手本体(8)均滑动连接,限位柱(11)位于限位孔(803)内;复位弹簧(12)设置在空腔(703)内,复位弹簧(12)的两端分别与空腔(703)远离抓手本体(8)的横向一侧内壁和移动块(10)连接。3.根据权利要求2所述的一种机械手式热镀锌上料机器人,其特征在于,弹性组件还包括拨杆(13);空腔(703)前侧内壁上设置有侧口(704),侧口(704)沿横向延伸;拨杆(13)贯穿侧口(704)设置在移动块(10)上。4.根据权利要求3所述的一种机械手式热镀锌上料机器人,其特征在于,拨杆(13)上设置有螺纹部,移动块(10)上设置有螺纹孔,拨杆(13)与移动块(10)螺纹连接,螺纹部位于螺纹孔内。5.根据权利要求1所述的一种机械手式热镀锌上料机器人,其特征在于,还包括保护垫(9);保护垫(9)设置有两个,两个保护垫(9)对称设置在抓手本体(8)上,保护垫(9)为弹性件。6.根据权利要求1所述的一种机械手式热镀锌上料机器人,其特征在于,还包括安装轴(5)和电动机(6);支撑架(4)为u型结构;安装轴(5)设置在支撑架(4)和卡盘(7)之间,安装轴(5)与支撑架(4)转动连接且与卡盘(7)刚性连接;电动机(6)设置在支撑架(4)横向一侧内壁上,电动机(6)与安装轴(5)驱动连接。7.根据权利要求6所述的一种机械手式热镀锌上料机器人,其特征在于,电动机(6)为伺服电动机,电动机(6)的型号为90sy-m04025。
技术总结
本实用新型涉及一种机械手式热镀锌上料机器人,属于上料装置技术领域。其主要针对现有装置不方便安装与拆卸抓手本体的问题,提出如下技术方案:包括底座、机器人本体、安装板、支撑架、卡盘、抓手本体和用于将抓手本体固定在卡盘上的弹性组件;机器人本体设置在底座上;安装板设置在机器人本体上;支撑架设置在安装板横向一侧;卡盘设置在支撑架横向一侧,卡盘远离支撑架的横向一侧对称设置有两个卡槽,卡槽外侧内壁上设置有勾槽,勾槽与卡槽形成L型槽结构,卡盘内设置有空腔,空腔位于卡盘中心,空腔位于两个卡槽之间。本实用新型能够方便抓手本体的安装与拆卸,从而提高了零件热镀锌的效率。镀锌的效率。镀锌的效率。
技术研发人员:田秀蕊 袁军民 袁靖宇 李庆
受保护的技术使用者:天津市威科特科技有限公司
技术研发日:2022.07.07
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。