1.本实用新型涉及六轴机器人技术领域,特别指一种用于六轴机器人的三点定位抓取装置。
背景技术:
2.六轴机器人拥有六个旋转轴,类似于人类的手臂,广泛应用于装货、卸货、喷漆、表面处理、测试、测量、弧焊、点焊、包装、装配、切屑机床、固定、特种装配操作、锻造、铸造等领域。
3.六轴机器人在工作前,需要先对待抓取的工件进行定位,传统上存在如下两种方法:其一是通过工业相机对工件进行定位,而这无疑会增加六轴机器人的硬件成本;其二是通过机械结构先定位工件,然后按固定位置抓取工件,而该方法会增加人力成本、硬件成本、降低自动化生产效率,某些场景下无法提供机械结构定位工件的空间。
4.因此,如何提供一种用于六轴机器人的三点定位抓取装置,实现提升工件定位抓取的效率以及适用范围,降低工件定位抓取的成本,成为一个亟待解决的技术问题。
技术实现要素:
5.本实用新型要解决的技术问题,在于提供一种用于六轴机器人的三点定位抓取装置,实现提升工件定位抓取的效率以及适用范围,降低工件定位抓取的成本。
6.本实用新型是这样实现的:一种用于六轴机器人的三点定位抓取装置,包括:
7.一个支架;
8.一个法兰,固设于所述支架的顶端;
9.两个光电传感器,并排设于所述支架的同一个侧面,且感应方向朝下;
10.一对夹爪,对称设于所述支架下端的两侧;
11.若干个加强筋,设于所述支架上;
12.若干个兜底件,设于所述夹爪的末端。
13.进一步地,所述加强筋为三角形。
14.本实用新型的优点在于:
15.通过在支架的同一个侧面设置两个感应方向朝下的光电传感器,六轴机器人通过光电传感器对工件进行定位并移动三点定位抓取装置到目标位置,以进行工件的自动定位抓取,无需额外的工业相机和机械结构,无需额外的操作空间,无需额外增加人力,最终极大的提升了工件定位抓取的效率以及适用范围,极大的降低了工件定位抓取的成本。
附图说明
16.下面参照附图结合实施例对本实用新型作进一步的说明。
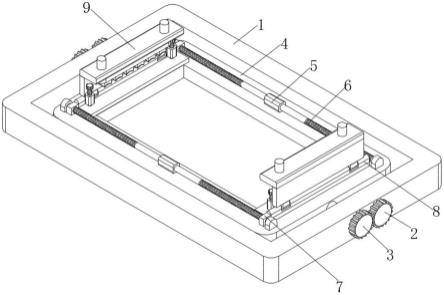
17.图1是本实用新型一种用于六轴机器人的三点定位抓取装置的结构示意图。
18.标记说明:
19.100-一种用于六轴机器人的三点定位抓取装置,1-支架,2-法兰,3-光电传感器,4-夹爪,5-加强筋,6-兜底件,7-工件,31-光轴。
具体实施方式
20.本实用新型实施例通过提供一种用于六轴机器人的三点定位抓取装置100,解决了现有技术中通过工业相机对工件进行定位会增加硬件成本,通过机械结构先定位工件,然后按固定位置抓取工件,会增加人力成本、硬件成本、降低自动化生产效率,且某些场景下无法提供操作空间的技术问题,实现了极大的提升了工件定位抓取的效率以及适用范围,极大的降低了工件定位抓取的成本的技术效果。
21.本实用新型实施例中的技术方案为解决上述问题,总体思路如下:设置两个光电传感器3对工件7进行自动定位抓取,无需额外的工业相机和机械结构,以提升工件7定位抓取的效率以及适用范围,降低工件7定位抓取的成本。
22.为了更好地理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
23.请参照图1所示,本实用新型一种用于六轴机器人的三点定位抓取装置100的较佳实施例,包括:
24.一个支架1,用于承载所述三点定位抓取装置100;
25.一个法兰2,固设于所述支架1的顶端,用于连接六轴机器人(未图示);
26.两个光电传感器3,并排设于所述支架1的同一个侧面,且感应方向朝下,用于对工件7进行定位;
27.一对夹爪4,对称设于所述支架1下端的两侧,用于抓取工件7;
28.若干个加强筋5,设于所述支架1上,用于提升所述支架1的强度;
29.若干个兜底件6,设于所述夹爪4的末端,用于对工件7进行兜底。
30.所述加强筋5为三角形。
31.本实用新型工作原理:
32.六轴机器人通过所述法兰2连接三点定位抓取装置100,六轴机器人将所述三点定位抓取装置100移动到工件7上方后,让所述三点定位抓取装置100沿工具坐标系x轴正方向移动,直至左边的所述光电传感器3感应到工件定位点p1,接着让所述三点定位抓取装置100沿工具坐标系z轴逆时针旋转(工具坐标系z轴与左边的所述光电传感器3的光轴31重合),直至右边的所述光电传感器3感应到工件定位点p2,然后让所述三点定位抓取装置100沿工具坐标系x轴正方向移动100mm,最后让所述三点定位抓取装置100沿工具坐标系y轴正方向移动,直至左边的所述光电传感器3感应到工件定位点p3,完成工件7的定位,并利用所述夹爪4对工件7进行抓取。
33.综上所述,本实用新型的优点在于:
34.通过在支架的同一个侧面设置两个感应方向朝下的光电传感器,六轴机器人通过光电传感器对工件进行定位并移动三点定位抓取装置到目标位置,以进行工件的自动定位抓取,无需额外的工业相机和机械结构,无需额外的操作空间,无需额外增加人力,最终极大的提升了工件定位抓取的效率以及适用范围,极大的降低了工件定位抓取的成本。
35.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应
当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。
技术特征:
1.一种用于六轴机器人的三点定位抓取装置,其特征在于:包括:一个支架;一个法兰,固设于所述支架的顶端;两个光电传感器,并排设于所述支架的同一个侧面,且感应方向朝下;一对夹爪,对称设于所述支架下端的两侧;若干个加强筋,设于所述支架上;若干个兜底件,设于所述夹爪的末端。2.如权利要求1所述的一种用于六轴机器人的三点定位抓取装置,其特征在于:所述加强筋为三角形。
技术总结
本实用新型提供了六轴机器人技术领域的一种用于六轴机器人的三点定位抓取装置,包括:一个支架;一个法兰,固设于所述支架的顶端;两个光电传感器,并排设于所述支架的同一个侧面,且感应方向朝下;一对夹爪,对称设于所述支架下端的两侧;若干个加强筋,设于所述支架上;若干个兜底件,设于所述夹爪的末端。本实用新型的优点在于:极大的提升了工件定位抓取的效率以及适用范围,极大的降低了工件定位抓取的成本。取的成本。取的成本。
技术研发人员:刘作斌 熊荣华 刘永
受保护的技术使用者:福建星云电子股份有限公司
技术研发日:2022.04.07
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。