1.本实用新型涉及机械自动化领域,尤其是一种新型机械手。
背景技术:
2.在设备或产品生产过程中,经常地,部件物料从上一工序移动至下一工序,而部件物料转移过程中多采用人工搬运,致使生产效率低,安全事故多。
技术实现要素:
3.针对背景技术中的不足,本实用新型提供一种新型机械手,并且克服了以上缺陷。
4.本实用新型解决其技术问题所采用的技术方案是:一种新型机械手,包括固定板,所述固定板上表面连接机械臂,固定板下表面固定有圆周均匀分布的机械爪机构,所述机械爪机构包括定位柱、固定座、气缸及勾爪,所述定位柱与固定板之间滑动连接,所述定位柱上设有容置腔,所述勾爪至于容置腔内并通过销与定位柱转动连接,勾爪的上端连接气缸;所述定位柱与固定板之间设有定位调节机构。
5.所述定位调节机构包括丝杆,固定板下表面固定有两轴承座及至于两轴承座之间的导轨,所述导轨上滑动设有滑块,丝杆的两端置于两轴承座内;丝杆上设有丝杆滑块,丝杆滑块固定在固定座上;所述定位柱的上端一体设有连接板,所述连接板位于丝杆滑块和滑块之间,且连接板与丝杆滑块和滑块均固定连接。
6.所述丝杆与轴承座之间设有轴承。
7.气缸的输出轴通过连接件连接勾爪的上端部,连接件与气缸的输出轴和勾爪均转动连接;所述勾爪的下端设有勾体。
8.所述圆周分布的机械爪机构的勾爪上的勾体均朝向固定板中心方向。
9.丝杆朝向外侧的一端连接手柄。
10.由于采用了上述技术方案,有效改善了现有生产流程中部件物料的转移通过人工搬运效率低,安全事故多的问题。通过机械手替代人工实现,其中圆周分布的勾爪相对距离可调,该机械手可适用多种规格部件物料;气缸推动勾爪,勾爪远离气缸的一端取料更稳。
附图说明
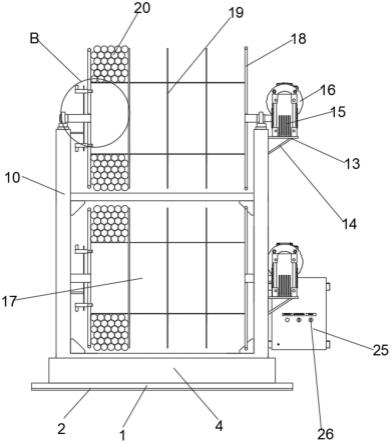
11.图1为本实用新型结构示意图。
12.图2为本实用新型的局部结构示意图。
13.图3为定位柱和勾爪连接结构示意图。
14.图4为定位柱和勾爪分离结构示意图。
具体实施方式
15.参考图1至图4所示,一种新型机械手,该机械手主要用于夹取圆形片状料。其包括固定板1,所述固定板1上表面连接机械臂(图中未显示),固定板1下表面固定有圆周均匀分
布的机械爪机构2,所述机械爪机构2包括定位柱3、固定座4、气缸5及勾爪6,所述定位柱3与固定板1之间滑动连接,所述定位柱3上设有容置腔31,所述勾爪6至于容置腔31内并通过销30与定位柱3转动连接,勾爪6的上端连接气缸5;所述定位柱3与固定板1之间设有定位调节机构7。
16.所述定位调节机构7包括丝杆71,固定板1下表面固定有两轴承座11及至于两轴承座11之间的导轨12,所述导轨12上滑动设有滑块121,丝杆71的两端置于两轴承座11内;丝杆71上设有丝杆滑块711,丝杆滑块711固定在固定座4上;所述定位柱3的上端一体设有连接板32,所述连接板32位于丝杆滑块711和滑块121之间,且连接板32与丝杆滑块711和滑块121均固定连接。
17.所述丝杆71与轴承座11之间设有轴承111。
18.气缸5的输出轴通过连接件51连接勾爪6的上端部,连接件51与气缸5的输出轴和勾爪6均转动连接;所述勾爪6的下端设有勾体61。
19.所述圆周分布的机械爪机构2的勾爪6上的勾体61均朝向固定板1中心方向。
20.丝杆71朝向外侧的一端连接手柄(图中未显示)。如附图1-2所示,通过摇动手柄使得丝杆71转动,进而调节定位柱3在丝杆71上的位置,同时调节相同距离的各定位柱3位置,满足不同直径的圆形片料的转移。
21.如附图1所示,圆形片料叠放完成后,机械手从上向下将其夹取,具体地,如附图1所示,先向下移动,然后气缸5带动勾爪6朝向气缸5的方向移动,勾爪61绕销30摆动,勾体61朝向固定板1中心勾起,所有勾体61均朝向中心勾起,将叠放的圆形片兜住,然后随机械臂移动至指定位置,后气缸5顶出,原理同上,所有勾体61同时朝外侧移动,将兜起的圆形片料放下。再次随机械臂移动至所需夹取的叠放的圆形片正上方,重复以上动作。
22.本实用新型有效改善了现有生产流程中部件物料的转移通过人工搬运效率低,安全事故多的问题。通过机械手替代人工实现,其中圆周分布的勾爪6相对距离可调,该机械手可适用多种规格部件物料;气缸5推动勾爪6,勾爪6远离气缸的一端勾体61取料更稳;圆片尺寸调节部分采用丝杆71和直线滑块121使整体结构精密性高。
23.各位技术人员须知:虽然本实用新型已按照上述具体实施方式做了描述,但是本实用新型的发明思想并不仅限于此实用新型,任何运用本发明思想的改装,都将纳入本专利专利权保护范围内。
技术特征:
1.一种新型机械手,包括固定板,所述固定板上表面连接机械臂,其特征在于:固定板下表面固定有圆周均匀分布的机械爪机构,所述机械爪机构包括定位柱、固定座、气缸及勾爪,所述定位柱与固定板之间滑动连接,所述定位柱上设有容置腔,所述勾爪至于容置腔内并通过销与定位柱转动连接,勾爪的上端连接气缸;所述定位柱与固定板之间设有定位调节机构。2.根据权利要求1所述的一种新型机械手,其特征在于:所述定位调节机构包括丝杆,固定板下表面固定有两轴承座及至于两轴承座之间的导轨,所述导轨上滑动设有滑块,丝杆的两端置于两轴承座内;丝杆上设有丝杆滑块,丝杆滑块固定在固定座上;所述定位柱的上端一体设有连接板,所述连接板位于丝杆滑块和滑块之间,且连接板与丝杆滑块和滑块均固定连接。3.根据权利要求2所述的一种新型机械手,其特征在于:所述丝杆与轴承座之间设有轴承。4.根据权利要求1所述的一种新型机械手,其特征在于:气缸的输出轴通过连接件连接勾爪的上端部,连接件与气缸的输出轴和勾爪均转动连接;所述勾爪的下端设有勾体。5.根据权利要求4所述的一种新型机械手,其特征在于:所述圆周分布的机械爪机构的勾爪上的勾体均朝向固定板中心方向。6.根据权利要求1所述的一种新型机械手,其特征在于:丝杆朝向外侧的一端连接手柄。
技术总结
本实用新型涉一种新型机械手,包括固定板,所述固定板上表面连接机械臂,固定板下表面固定有圆周均匀分布的机械爪机构,所述机械爪机构包括定位柱、固定座、气缸及勾爪,所述定位柱与固定板之间滑动连接,所述定位柱上设有容置腔,所述勾爪至于容置腔内并通过销与定位柱转动连接,勾爪的上端连接气缸;所述定位柱与固定板之间设有定位调节机构。通过机械手替代人工实现,其中圆周分布的勾爪相对距离可调,该机械手可适用多种规格部件物料;气缸推动勾爪,勾爪远离气缸的一端取料更稳。勾爪远离气缸的一端取料更稳。勾爪远离气缸的一端取料更稳。
技术研发人员:张永发 雷春辉
受保护的技术使用者:永康市钧凯机械设备有限公司
技术研发日:2022.06.23
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。