1.本技术涉及测试技术领域,特别地,涉及一种用于电机台架的快速精密调节设备。
背景技术:
2.电机作为各种设备的驱动装置,在国民生产、生活中有着不可或缺的作用。同时,在电机的研制和生产过程中,电机台架测试是必不可少的,在此测试过程中,经常存在着陪试电机和被测电机的轴系对中问题,需调节陪试电机或被测电机的电机支座进行轴系对中。
3.目前,常见的对中调节方法是在电机支座的底部四角加垫铜皮进行高度调整,该方法存在调整耗时长、精度差的问题。近年来随着新研发电机的转速越来越高,电机测试台架的轴系对中精度的要求也越来越高,原有垫铜皮调节的方法已越来越难以方便、快捷的实现对中要求。因此,这里提出一种全新的调节装置,可以快速便捷的实现电机测试台架的对中调节要求。
技术实现要素:
4.本技术实施例提供了一种用于电机台架的快速精密调节设备,以解决现有电机测试台架的对中调节耗时长、精度差的技术问题。
5.本技术采用的技术方案如下:
6.一种用于电机台架的快速精密调节设备,包括:
7.激光对中仪,所述激光对中仪的第一测量器和第二测量器分别相对设置在陪试电机的第二联轴器左右两侧,用于检测陪试电机的第二电机支座的底部四角的高度调整值;
8.四个高度调节装置,分别通过万向铰接装置铰接设置在所述第二电机支座四角的底部四角,用于调节所述第二电机支座四角底部四角的高度;
9.四个电机执行机构,分别与各高度调节装置驱动连接,用于为各个高度调节装置提供动力;
10.调整控制装置,与所述电机执行机构电路连接,用于根据所述第二电机支座底部四角的高度调整值控制各电机执行机构驱动相应的高度调节装置调节所述第二电机支座底部四角的高度,使陪试电机的轴线与被测电机的轴线在高度方向上满足设定对中要求。
11.进一步地,所述高度调节装置包括:
12.上斜块,通过万向铰接装置铰接设置在所述第二电机支座底部四角的矩形凹槽内;
13.下斜块,设置在所述矩形凹槽内且位于所述上斜块下方,仅能沿所述矩形凹槽长度方向直线滑动,所述下斜块的上斜面与所述上斜块的下斜面相贴合;
14.调节螺钉,转动设置在所述第二电机支座底部四角且一端延伸至矩形凹槽内与所述下斜块螺纹连接,另一端与电机执行机构的输出端驱动连接。
15.进一步地,所述万向铰接装置包括:
16.铰接轴,固定设置在所述第二电机支座底部四角且横穿所述矩形凹槽和上斜块的铰接孔;
17.关节轴承,所述关节轴承的固定内圈固定在所述铰接轴上,所述关节轴承的活动外圈则固定在所述上斜块的铰接孔内。
18.进一步地,所述下斜块的上斜面与上斜块的下斜面的倾斜角度均为8
°
~14
°
。
19.进一步地,所述第二电机支座底部的四角侧面通过螺钉可拆卸地安装设置有与所述第二电机支座共同合围形成所述矩形凹槽的下斜块限位板。
20.进一步地,所述调节螺钉设置有轴肩,所述第二电机支座的底部的四角侧面还设置有与所述轴肩相配合限制所述调节螺钉轴向移动的螺钉限位板。
21.进一步地,所述电机执行机构包括:
22.脉冲电机,用于根据调整控制器输出的脉冲信号输出设定转角或步数;
23.减速机,所述减速机的输入端与脉冲电机的输出端驱动连接,输出端通过减速机转接座与相应的高度调节装置的输入端驱动连接。
24.进一步地,所述脉冲电机包括步进电机、伺服电机。
25.进一步地,所述减速机包括行星减速机、谐波减速机。
26.进一步地,所述调整控制装置包括:
27.控制器,与所述电机执行机构电路连接,用于根据激光对中仪所测的第二电机支座底部四角的高度调整值控制各电机执行机构驱动相应的高度调节装置调节所述第二电机支座底部四角的高度,使陪试电机的轴线与被测电机的轴线在高度方向上满足设定对中要求;
28.人机交互面板,与所述控制器信号连接,用于接收用户输入的第二电机支座的底部四角的高度调整值、启动调整以及输出调整结果。
29.相比现有技术,本技术具有以下有益效果:
30.本技术提供了一种用于电机台架的快速精密调节设备,包括激光对中仪、四个高度调节装置、四个电机执行机构、调整控制装置,所述激光对中仪的第一测量器和第二测量器分别相对设置在陪试电机的第二联轴器左右两侧,用于检测陪试电机的第二电机支座的底部四角的高度调整值;四个高度调节装置分别通过万向铰接装置铰接设置在所述第二电机支座四角的底部四角,用于调节所述第二电机支座四角底部四角的高度;四个电机执行机构分别与各高度调节装置驱动连接,用于为各个高度调节装置提供动力;所述调整控制装置与所述电机执行机构电路连接,用于根据所述第二电机支座底部四角的高度调整值控制各电机执行机构,相比现有技术,本技术具有如下特点:
31.1、电机支座的四角角高度均连续可调,克服了通过反复增减铜皮垫高方式的低效和精度差的问题;
32.2、调节快捷,无论高度差存在于哪个部位,都可以通过相应的电机执行机构和高度调节装置单点调节实现快速对中;
33.3、调节后的各接触部位为面接触,且具有自锁功能,安全可靠,避免使用过程中再次出现轴系偏移;
34.4、调整过程为电驱动式的自动调整,实现了调整的精密性、快捷性。
35.除了上面所描述的目的、特征和优点之外,本技术还有其它的目的、特征和优点。
下面将参照附图,对本技术作进一步详细的说明。
附图说明
36.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
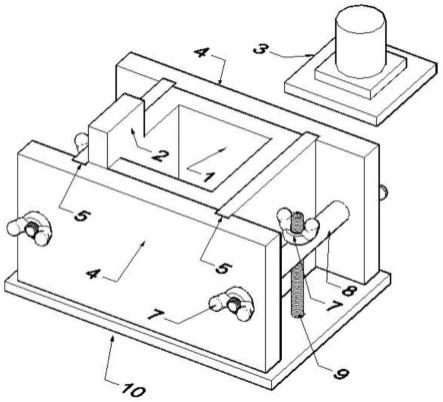
37.图1是本技术优选实施例的调节设备在电机测试台架中的使用示意图示意图。
38.图2是本技术本技术优选实施例的调节设备俯视示意图(局部)。
39.图3是本技术本技术优选实施例的高度调节装置局部剖视示意图。
40.图4是图3中a-a向剖视示意图。
41.图5是本技术优选实施例的人机交互面板界面示意图。
42.图6是本技术优选实施例的激光对中仪转位示意图。
43.图中:1、被测电机;2、第一电机支座;3、第一联轴器;4、扭矩传感器;5、第一测量器;6、第二联轴器;7、第二测量器;8、第二电机支座;9、陪试电机;10、高度调节装置;11、电机执行机构;12、脉冲电机;13、减速机;14、上斜块;15、下斜块;16、调节螺钉;17、减速机转接座;18、螺钉限位板;19、关节轴承;20、铰接轴;21、下斜块限位板;22、人机交互面板。
具体实施方式
44.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
45.如图1所示,本实施例提供了一种用于电机台架的快速精密调节设备,包括激光对中仪、四个高度调节装置10、四个电机执行机构11、调整控制装置,其中:
46.所述激光对中仪的第一测量器5和第二测量器7分别相对设置在陪试电机9的第二联轴器6左右两侧,用于检测陪试电机9的第二电机支座8的底部四角的高度调整值;
47.四个高度调节装置10分别通过万向铰接装置铰接设置在所述第二电机支座四角8的底部四角,用于调节所述第二电机支座四角8底部四角的高度,万向铰接装置可使四个高度调节装置相互独立,可实现各处高度调整
±
0.7mm;
48.四个电机执行机构11分别与各高度调节装置10驱动连接,用于为各个高度调节装置10提供动力;
49.所述调整控制装置与所述电机执行机构11电路连接,用于根据所述第二电机支座8底部四角的高度调整值控制各电机执行机构11驱动相应的高度调节装置10调节所述第二电机支座8底部四角的高度,使陪试电机9的轴线与被测电机1的轴线在高度方向上满足设定对中要求。
50.具体地,如图3和图4所示,所述高度调节装置10包括上斜块14、下斜块15、调节螺钉16,其中:
51.所述上斜块14通过万向铰接装置铰接设置在所述第二电机支座8底部四角的矩形凹槽内;
52.所述下斜块15设置在所述矩形凹槽内且位于所述上斜块14下方,仅能沿所述矩形凹槽长度方向直线滑动,所述下斜块15的上斜面与所述上斜块14的下斜面相贴合;
53.所述调节螺钉16转动设置在所述第二电机支座8底部四角且一端延伸至矩形凹槽
内与所述下斜块15螺纹连接,另一端与电机执行机构11的输出端驱动连接。
54.本实施例中,所述调节螺钉16仅能转动,调节螺钉16在转动过程中,利用螺纹将旋转运动转化为所述下斜块15沿所述矩形凹槽长度方向直线运动,继而在斜面的作用下,调整上斜块14、所述第二电机支座8的高度。
55.具体地,如图4所示,所述万向铰接装置包括铰接轴20、关节轴承19,其中:
56.所述铰接轴20固定设置在所述第二电机支座8底部四角且横穿所述矩形凹槽和上斜块14的铰接孔;
57.所述关节轴承19的固定内圈固定在所述铰接轴20上,所述关节轴承19的活动外圈则固定在所述上斜块14的铰接孔内,除了采用关节轴承19外。
58.本实施例中,所述万向铰接装置包括铰接轴20、关节轴承19,通过关节轴承19,调节过程中,由于第二电机支座8底部四角并非位于水平面,因此,第二电机支座8与上斜块14之间会有很小的倾角出现,此倾角由关节轴承19进行补偿,从而避免调节时第二电机支座8底部四角相互出现干扰现象,本实施例还可以采用球铰等类似的万向铰接装置进行替代。
59.具体地,所述下斜块15的上斜面与上斜块14的下斜面的倾斜角度均为8
°
~14
°
从而使斜块之间具有一定自锁功能,避免使用过程中再次出现轴系偏移。
60.具体地,如图4所示,所述第二电机支座8底部的四角侧面通过螺钉可拆卸地安装设置有与所述第二电机支座8共同合围形成所述矩形凹槽的下斜块限位板21,方便斜块的安装。
61.具体地,如图3所示,所述调节螺钉16设置有轴肩,所述第二电机支座8的底部的四角侧面还设置有与所述轴肩相配合限制所述调节螺钉16轴向移动的螺钉限位板18。
62.本实施例的调节螺钉16带有精加工的轴肩,通过螺钉限位板18约束在第二电机支座8上,只能作旋转运动,不能轴向移动。
63.具体地,所述电机执行机构11包括脉冲电机12、减速机13,其中:
64.所述脉冲电机12用于根据调整控制器输出的脉冲信号输出设定转角或步数,所述脉冲电机12包括步进电机、伺服电机等,本实施例采用步进电机。
65.所述减速机13的输入端与脉冲电机12的输出端驱动连接,输出端通过减速机转接座17与相应的高度调节装置10的输入端驱动连接,所述减速机13包括行星减速机、谐波减速机等,本实施例采用行星减速机,所述步进电机的转动通过行星减速机、调节螺钉16的螺纹传动之后,转化为斜块的上下移动,从而实现电机支座的高度调整。
66.具体地,所述调整控制装置包括控制器、人机交互面板22,其中:
67.所述控制器与所述电机执行机构11电路连接,所述控制器采用常规的采用plc或嵌入式系统,用于根据激光对中仪所测的第二电机支座8底部四角的高度调整值控制各电机执行机构11驱动相应的高度调节装置10调节所述第二电机支座8底部四角的高度,使陪试电机9的轴线与被测电机1的轴线在高度方向上满足设定对中要求;
68.所述人机交互面板22与所述控制器信号连接,用于接收用户输入的第二电机支座8的底部四角的高度调整值、启动调整以及输出调整结果(见图5)。
69.上述实施例提供的快速精密调节设备的工作原理包括:
70.第二电机支座8上的所有重量通过铰接轴20、关节轴承19作用到上斜块14,因此上斜块14始终与下斜块15贴合;调节螺钉16旋转时,下斜块15在调节螺钉16的螺纹推力作用
下作前后移动,上斜块14随斜块贴合面的移动而向上或向下移动;调节螺钉16调整到位后,由于斜块的斜度足够小,所以上斜块14与下斜块15的接触面自锁,不会出现两斜块之间的滑移。调节过程中,第二电机支座8与上斜块14之间会有很小的倾角出现,此倾角由关节轴承19进行补偿。
71.电动执行机构由一个小型步进电机和大速比行星减速机串联组成,行星减速机的输出轴与调节螺钉16之间通过联轴器刚性联结,二者可以实现同步转动,最终将步进电机输出轴的圆周运动转化为斜块的上下运动。通过行星减速机的传动比参数、调节螺钉的螺距参数、斜块的斜度参数,可以精确计算步进电机的步长与斜块上下位移之间的比例关系,本领域技术人员可以根据所测的高度调整值和步长与斜块上下位移之间的比例关系来获得脉冲数,具体过程为常规技术手段,本领域技术人员可以根据实际参数进行设置,在此不再赘述。
72.调整控制装置采用plc或嵌入式系统设计调整控制器,控制器根据用户输入的高度调整值进行比例计算,得到各步进电机所需的转动步数,然后将步数数据转换为脉冲信号发送至各执行步进电机,实现四点高度的独立调整,控制器的计算方法为现有技术,本领域技术人员,在已知待调整高度、步进电机参数、各行星减速机的传动比参数、各调节螺钉的螺距参数、各斜块的斜度参数的前提下,本领域技术人员知道如何计算各步进电机所需的转动步数,并将所需转动步数转换为脉冲信号发送至各执行步进电机,也即本技术不存在对方法和软件的改进,所用的方法和软件均为常规技术手段。
73.调整控制装置的人机交互面板22内容如图5所示,首先使用激光对中仪精确测量四点待调整高度,然后将测量结果填入人机交互面板上的对应位置。按下开始按钮后,各调整机构电机按输入值进行调整动作,调整完毕后人机交互面板会显示调整已完成;再次使用激光对中仪进行高度检测即可,除测量、填入调整值数值外,调节过程无需人工干预。
74.激光对中仪测量调整值的示例:在需要对中的联轴器上固定激光对中仪的第一测量器5和第二测量器7(图1所示),在旋转轴最高点(a点)的左、右两侧将第一测量器5和第二测量器7调整到合适位置,然后在激光对中仪的显示仪表中输入设备所需参数,包括第一测量器5和第二测量器7的距离值、各高度调节装置10之间的几何距离等;将第一测量器5和第二测量器7旋转至b、c、d三个位置(图6所示),此时激光对中仪的显示设备会显示出第二电机支座8底部四点的高度调整值,激光对中仪测量高度调节值的过程为现有技术,在此不再赘述,将所测的四点的高度调整值对应填入调整控制装置的人机交互面板22,按下调整开始键后即可开始调整,调整完毕后,人机交互面板22会提示调整已完成。
75.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。