1.本发明属于岩心孔隙度计算的技术领域,具体涉及一种岩屑岩心孔隙度快速测定方法。
背景技术:
2.孔隙度,即岩石的孔隙体积与岩石的表面体积的比值。其中,岩石的绝对孔隙体积与岩石的表面体积的比值,称为绝对孔隙度。岩石的有效孔隙体积与岩石的表面体积的比值,称为有效孔隙度。孔隙度是计算储量和评价油藏特性的一个重要指标,通常用的是有效孔隙度。
3.在原油开采领域,岩心的孔隙度作为分析地质储层中油气储量的重要参数。现有技术中,通过对岩心进行ct扫描得到ct扫描图像后,基于该ct扫描图像构建数字岩心,然后基于数字岩心中孔隙的体积来计算得到岩心的孔隙度。
4.但是在实际应用中,比如在具体的施工现场,往往需要进行快速的岩心孔隙度的估算,以对工程勘探或者任务进行下一步的指导,但ct扫描设备体积大,不便于携带且不方便现场施工,故采用ct扫描设备进行现场的岩心孔隙度的计算明显不适用。
技术实现要素:
5.本发明的目的在于针对现有技术中的上述不足,提供一种岩屑岩心孔隙度快速测定方法,以解决或改善上述的问题。
6.为达到上述目的,本发明采取的技术方案是:
7.一种岩屑岩心孔隙度快速测定方法,其包括以下步骤:
8.s1、在目标岩心处放置矩形标识,并对该矩形标识处进行图像拍摄;
9.s2、筛选若干张清晰度满足阈值的图像;
10.s3、对图像进行消噪处理;
11.s4、采用fcm算法对消噪处理后的目标岩心图像进行二值化处理;
12.s5、采用sobel算子对目标岩心图像中的孔隙边缘轮廓进行加强,并采用hog特征提取孔隙所在区域的特征;
13.s6、采用大津法阈值分割算法对孔隙所在区域进行分割,获得岩心孔隙图像;
14.s7、对岩心孔隙图像进行圆形等效分布,并计算等效分布后岩心孔隙的面积;
15.s8、根据计算所得的岩心孔隙面积,估算岩心孔隙度。
16.进一步地,步骤s3具体包括:
17.从图像中获取任意一个像素点x(i,j),以该像素点为中心,获得邻域s,计算邻域s内全部像素的均值m、均方差σ,计算x(i,j)与均值m之间的偏差σ
x
,若在邻域s内至少一个以上的像素点y(i,j)与x(i,j)间的偏差σy《σ
x
,则x(i,j)为图像的边缘点,否则x(i,j)为噪声点。
18.进一步地,步骤s4具体包括:
19.s4.1、将每个像素点对象xj(1≤j≤q)分配给c个类别,使用c
×
q的隶属矩阵u={u
ij
}表示对象与类别之间的隶属关系,则x的模糊划分空间为:
[0020][0021]
其中,u
ij
为第j个像素点对象属于第i个类的隶属程度;
[0022]
s4.2、给定x={x1,x2,
…
,xq}为待聚类数字图像所有像素点灰度值的数据集,聚类中心v={v1,v2,
…
,vc},定义目标函数jm为:
[0023][0024]
其中,m为控制模糊程度的加权指数,当m趋于1时,分区接近硬聚类;m趋于无穷大时,分区将产生分离得很差的集群;|x
j-vi|为第j个像素点灰度值与第i个聚类中心之间的欧几里得距离;
[0025]
s4.3、目标函数对u
ij
和vi进行一阶求导,当u
ij
和vi的一阶导数为零时,隶属矩阵和聚类中心更新为:
[0026][0027][0028]
进一步地,步骤s5具体包括:
[0029]
s5.1、对图像的目标岩心区域进行灰度处理;
[0030]
s5.2、采用sobel算子对目标岩心区域中的孔隙边缘轮廓进行加强;
[0031]
s5.3、采用hough变换对孔隙进行定位,将图像空间中共线的点映射到参数空间,利用局部峰值检测出直线参数后再映射到图像空间,得到图像直线检测结果,并得到孔隙的边缘;
[0032]
s5.4、采用hog特征提取方法对孔隙所在的区域进行特征提取,以得到孔隙在目标区域的具体位置。
[0033]
进一步地,步骤s6中大津法阈值中的阈值t计算包括:
[0034]
s6.1、将图像中的孔隙部分作为前景部分,图像中的其它部分为背景部分;
[0035]
s6.2、计算图像中前景像素点所占比例ω0和背景像素点所占比例ω1;
[0036][0037][0038]
其中,图像的大小为m*n,n0为图像中像素的灰度值小于阈值t的像素点个数,n1为像素点大于阈值t的像素点个数;
[0039]
s6.3、计算图像的总平均灰度为μ:
[0040]
μ=w0*μ0 w1*μ1[0041]
其中,μ0为前景像素点的平均灰度,μ1为背景像素点的平均灰度;
[0042]
s6.4、计算图像前景部分和背景部分的内间方差g:
[0043]
g=w0w1(μ
0-μ1)2[0044]
s6.5、采用遍历方法得到内间方差g的最大值即为阈值t。
[0045]
本发明提供的岩屑岩心孔隙度快速测定方法,具有以下有益效果:
[0046]
本发明通过在施工现场对目标岩屑岩心目标区域的拍摄,以获得多张高清岩心图像,并对该岩心图像进行筛选、去噪、二值化处理、边缘处理、图像分割后,得到孔隙的分割图像,并计算分割后孔隙的面积,根据孔隙面积与目标岩心图像面积的比值,以快速估算得到岩心的孔隙度。
附图说明
[0047]
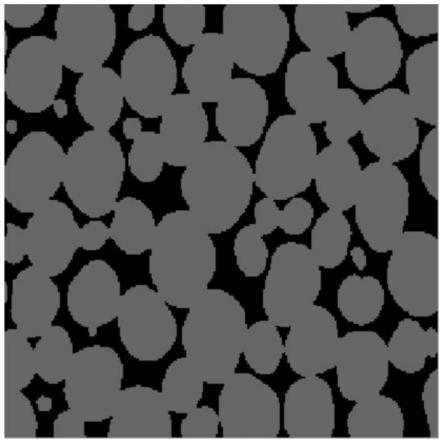
图1为本发明图像分割后的岩心孔隙的图像。
[0048]
图2为本发明不规则岩心孔隙等效面积计算图像。
具体实施方式
[0049]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
[0050]
实施例1,本方案的岩屑岩心孔隙度快速测定方法,包括以下步骤:
[0051]
步骤s1、在目标岩心处放置矩形标识,并对该矩形标识处进行图像拍摄;
[0052]
本步骤为提高后期岩心图像的识别,以及加快后期图像的处理,在图像拍摄之前,可采用马克笔或者其它能够勾勒线条的工具在岩心上进行标识,本步骤优选在岩心上勾勒一个矩形区域,该矩形区域可人为定义。
[0053]
步骤s2、筛选若干张清晰度满足阈值的图像;
[0054]
本步骤为提高后期图像的处理效率,在众多图像中选取清晰度较高的图像作为目标图像,并去除明显具有缺陷的图像,如清晰度较高但拍摄角度不规范,或者不能完全体现岩心目标区域的图像。
[0055]
步骤s3、对图像进行消噪处理,本步骤的消噪处理可采用现有技术,且本步骤的噪声点的识别包括:
[0056]
从图像中获取任意一个像素点x(i,j),以该像素点为中心,获得邻域s,计算邻域s内全部像素的均值m、均方差σ,计算x(i,j)与均值m之间的偏差σ
x
,若在邻域s内至少一个以上的像素点y(i,j)与x(i,j)间的偏差σy《σ
x
,则x(i,j)为图像的边缘点,否则x(i,j)为噪声点。
[0057]
根据识别的噪声点,并去除该噪声点,以达到对岩心图像进行消噪的目的。
[0058]
步骤s4、采用fcm算法对消噪处理后的目标岩心图像进行二值化处理,以增加图像的聚类效果,提高图像的精度,且可以保留图像的细节图像,具有更高的图像识别精度;
[0059]
本步骤具体包括:
[0060]
步骤s4.1、将每个像素点对象xj(1≤j≤q)分配给c个类别,使用c
×
q的隶属矩阵u={u
ij
}表示对象与类别之间的隶属关系,则x的模糊划分空间为:
[0061][0062]
其中,u
ij
为第j个像素点对象属于第i个类的隶属程度;
[0063]
步骤s4.2、给定x={x1,x2,
…
,xq}为待聚类数字图像所有像素点灰度值的数据集,聚类中心v={v1,v2,
…
,vc},定义目标函数jm为:
[0064][0065]
其中,m为控制模糊程度的加权指数,当m趋于1时,分区接近硬聚类;m趋于无穷大时,分区将产生分离得很差的集群;|x
j-vi|为第j个像素点灰度值与第i个聚类中心之间的欧几里得距离;
[0066]
步骤s4.3、目标函数对u
ij
和vi进行一阶求导,当u
ij
和vi的一阶导数为零时,隶属矩阵和聚类中心更新为:
[0067][0068]
[0069]
步骤s5、采用sobel算子对目标岩心图像中的孔隙边缘轮廓进行加强,并采用hog特征提取孔隙所在区域的特征;
[0070]
步骤s5.1、对图像的目标岩心区域进行灰度处理;
[0071]
步骤s5.2、采用sobel算子对目标岩心区域中的孔隙边缘轮廓进行加强;
[0072]
步骤s5.3、采用hough变换对孔隙进行定位,将图像空间中共线的点映射到参数空间,利用局部峰值检测出直线参数后再映射到图像空间,得到图像直线检测结果,并得到孔隙的边缘;
[0073]
步骤s5.4、采用hog特征提取方法对孔隙所在的区域进行特征提取,以得到孔隙在目标区域的具体位置。
[0074]
本步骤在于对岩心孔隙进行边缘处理,以加强其边缘的图像信息,以更好的服务步骤s6的图像分割,以减少步骤s6中的计算复杂度,提高孔隙边缘的清晰度。
[0075]
步骤s6、采用大津法阈值分割算法对孔隙所在区域进行分割,获得岩心孔隙图像;
[0076]
本步骤大津法阈值中的阈值t计算包括以下步骤:
[0077]
步骤s6.1、将图像中的孔隙部分作为前景部分,图像中的其它部分为背景部分;
[0078]
步骤s6.2、计算图像中前景像素点所占比例ω0和背景像素点所占比例ω1;
[0079][0080][0081]
其中,图像的大小为m*n,n0为图像中像素的灰度值小于阈值t的像素点个数,n1为像素点大于阈值t的像素点个数;
[0082]
步骤s6.3、计算图像的总平均灰度为μ:
[0083]
μ=w0*μ0 w1*μ1[0084]
其中,μ0为前景像素点的平均灰度,μ1为背景像素点的平均灰度;
[0085]
步骤s6.4、计算图像前景部分和背景部分的内间方差g:
[0086]
g=w0w1(μ
0-μ1)2[0087]
步骤s6.5、采用遍历方法得到内间方差g的最大值即为阈值t。
[0088]
步骤s7、对岩心孔隙图像进行圆形等效分布,并计算等效分布后岩心孔隙的面积;
[0089]
如图1所示,在实际应用场景中,大部分的孔隙均为圆形或者椭圆形,且整个孔隙图像呈现为较为规范的状态,在图1所示的图像中,可采用圆形进行孔隙面积的计算,即将每个半径不同的孔隙看作为一个圆形,并计算每个圆形的面积,将所有面积进行累加得到孔隙的总面积s1,总面积s1与岩心图像总面积的比值即为估算所得的孔隙度;
[0090]
若图2所示,在实际应用场景中,可能会遇到分割后不规则的孔隙图像,在此基础上,采用圆形去填充孔隙面积,以尽可能多的填充孔隙,即使如此,在此基础上,计算每个圆形的面积,将所有面积进行累加得到孔隙的估算总面积s2,总面积s2与岩心图像总面积的比值即为估算所得的孔隙度.
[0091]
步骤s8、根据计算所得的岩心孔隙面积,估算岩心孔隙度;
[0092]
采用孔隙估算的面积与岩心图像的面积的比值作为岩心的孔隙度。
[0093]
需要表明的是,本实施例是用于施工现场岩心孔隙度的快速评估,肯定存在一定的计算误差,但该误差对于现场的施工指导而言,只要该误差位于一定的阈值范围内,即可满足估算要求。
[0094]
需要表明的是,本实施例的计算方法即可实现对岩心的孔隙度的快速评估,也能实现对岩屑薄片孔隙度的快速评估。
[0095]
需要表明的是,为严总本实施例算法评估的准确性,可将本实施例的计算结果与ct扫描设备的扫描结果进行对比,当两者的对比结果满足阈值,则证明本实施例评估算法具有实际的指导意义。
[0096]
如采用微米ct扫描设备与矿物分析仪等数字化检测设备对钻井获取的岩心与岩屑开展数字化定量检测分析,获取样品的微观三维结构与矿物组分,并获取各项物性参数,包含但不限于孔隙度、渗透率、孔隙结构特征、岩电参数、岩石力学数据及脆性指数。
[0097]
将该ct扫描设备扫描的目标岩心所得的孔隙度与本实施例评估所得孔隙度进行比较,发现两者误差在3%~5%之间,属于现场快速评估可接受范围内,故证明本实施例的快速评估具有一定的实际指导意义。
[0098]
由此可知,本发明通过在施工现场对目标岩屑岩心目标区域的拍摄,以获得多张高清岩心图像,并对该岩心图像进行筛选、去噪、二值化处理、边缘处理、图像分割后,得到孔隙的分割图像,并计算分割后孔隙的面积,根据孔隙面积与目标岩心图像面积的比值,以快速估算得到岩心的孔隙度。
[0099]
虽然结合附图对发明的具体实施方式进行了详细地描述,但不应理解为对本专利的保护范围的限定。在权利要求书所描述的范围内,本领域技术人员不经创造性劳动即可做出的各种修改和变形仍属本专利的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。