1.本发明涉及新能源高渗透电力系统惯量评估技术领域,尤其涉及一种基于变频极值时间的风机虚拟惯量评估方法及系统。
背景技术:
2.风机通过附加控制可具备与同步机类似的惯性响应能力,但与同步机的固有惯量恒定不同,通过附加控制虚拟出的转动惯量不仅取决于风机的固有惯量、初始转速及控制参数,并且与系统频率变化密切相关,导致其特性复杂多变,但也更加灵活可控。当前,风机的虚拟惯量评估较为困难,目前尚须探讨。由于初始风速决定了风机的动能储备,而风机转速又会同时受到功率跟踪控制、附加惯性控制及系统频率特性影响,导致虚拟惯性始终处于动态变化之中,不仅量化较为复杂,且存在运行风险。因此,急需一种基于变频极值时间的风机虚拟惯量评估方法及系统,通过合理的时间尺度,约束多源变量,完成风机虚拟惯量评估。
技术实现要素:
3.为了解决上述技术问题,本发明的目的是提供一种基于变频极值时间的风机虚拟惯量评估方法及系统,可根据变频极值时间和风机运行状态约束评估出风机在不同初始转速下所具有的转速变化量范围和虚拟惯量范围。
4.为了实现上述技术目的,本发明提供了一种基于变频极值时间的风机虚拟惯量评估方法,包括以下步骤:
5.获取风电并网系统的变频极值时间,其中,变频极值时间用于表示系统遭受扰动后,频率由初始值跌落或抬升至频率偏差达到最大值经历的时间;
6.根据风机的初始转速,通过获取风机在动能储备约束下的第一最大转速变化量,以及风机在风机功率约束下的第二最大转速变化量,生成风机的最大转速变化量;
7.基于最大转速变化量,通过变频极值时间,对风机进行虚拟惯量评估,生成风机的最大惯性时间常数。
8.优选地,在获取风电并网系统的变频极值时间的过程中,通过获取同步机、风机以及负荷的第一频率响应,生成风机的风电高渗透系统受到功率扰动后的第二频率响应;
9.在不考虑风机惯性响应的前提下,将系统功率扰动等效成阶跃扰动,获取变频极值时间。
10.优选地,在生成第二频率响应的过程中,第二频率响应的表达式为:
[0011][0012]
其中,δpd为负荷突增,δpw为风机功率响应信号,g(t)为功率响应信号和频率响应信号之间的传递函数,b、c、w、ζ、为计算参数,k为风电渗透率,k
l
为负荷调节系数,σ为调差系数,d为系统阻尼系数,t为频率响应时间;
[0013]
计算参数表示为:
[0014][0015]
优选地,在获取同步机、风机以及负荷的第一频率响应的过程中,第一频率响应的表达式为:
[0016][0017]
其中,δpm为同步机功率响应信号;δp
l
为负荷功率响应信号;h为系统惯性时间常数,δf表示频率偏差。
[0018]
优选地,在获取同步机功率响应信号的过程中,同步机功率响应信号表示为:
[0019][0020]
其中,a为涡轮机特征系数,t为涡轮机等值惯性时间常数,δf为频率偏差。
[0021]
优选地,在获取系统惯性时间常数的过程中,系统惯性时间常数取决于系统容量及风电渗透率,表示为:
[0022][0023]
式中,hg为同步机惯性时间常数;sg为同步机装机容量;sb为系统总容量。
[0024]
优选地,在获取风电并网系统的变频极值时间的过程中,变频极值时间tfm表示为:
[0025][0026]
优选地,在获取最大转速变化量的过程中,动能储备约束表示为:
[0027][0028]
式中,δe
kwmax
为风机动能储备;ω
r0
为风机惯性响应前的初始转速;ω
min
、ω
max
分别为风机稳定运行的允许最低转速、最高转速,通常取值为0.7pu和1.2pu;
[0029]
在动能储备约束下,第一最大转速变化量δω
rmax1
表示为:
[0030][0031]
其中,δωr为风机转速变化量;
[0032]
风机功率约束表示为:
[0033][0034]
式中,pn为风机额定功率;p
min
为风机稳定运行的最小转速对应的功率;p
opt
为mppt控制下的风机有功输出功率;k
opt
为最大功率跟踪系数;ω
r0
为风机初始转速;ω
min
为风机稳定运行的允许最低转速;δpd为功率扰动;
[0035]
在风机功率约束下,第二最大转速变化量δω
rmax2
表示为:
[0036][0037]
式中,k
opt
为最大功率跟踪系数;ω
r0
为风机初始转速;pn为风机额定功率;hw为风机固有惯性时间常数。
[0038]
优选地,在获取风机的最大惯性时间常数的过程中,最大惯性时间常数h
vir
表示为:
[0039][0040]
式中,λ
opt
为最优叶尖速比;v为实时风速;r为风轮半径,ω
max
为风机稳定运行允许最大转速;v
min
为切入风速;v
max
为桨距控制启动前的最大风速。
[0041]
本发明公开了一种基于变频极值时间的风机虚拟惯量评估系统,用于对风机的虚拟惯量在变频极值时间内进行量化评估,包括:
[0042]
变频极值时间生成模块,用于获取风电并网系统的变频极值时间,其中,变频极值时间用于表示系统遭受扰动后,频率由初始值跌落或抬升至频率偏差达到最大值经历的时间;
[0043]
最大转速变化量生成模块,用于根据风机的初始转速,通过获取风机在动能储备约束下的第一最大转速变化量,以及风机在风机功率约束下的第二最大转速变化量,生成风机的最大转速变化量;
[0044]
评估模块,用于基于最大转速变化量,通过变频极值时间,对风机进行虚拟惯量评估,获取风机的最大惯性时间常数。
[0045]
本发明公开了以下技术效果:
[0046]
本发明实现了对风机虚拟惯量在变频极值时间内进行量化评估,填补了本领域的技术空白。
附图说明
[0047]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0048]
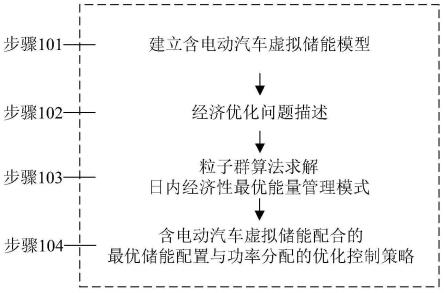
图1是本发明实施例基于变频极值时间的风机虚拟惯量评估方法的流程图;
[0049]
图2是本发明实施例发电机组的功率支撑与系统频率动态响应曲线;
[0050]
图3是本发明实施例风电高占比系统频率响应简化模型;
[0051]
图4是本发明实施例不同风电渗透率下频率响应曲线;
[0052]
图5是本发明实施例风机最大转速变化量评估结果;
[0053]
图6是本发明实施例风机最大虚拟惯量评估结果;
[0054]
图7是本发明实施例风电高占比仿真系统拓扑图;
[0055]
图8是本发明实施例仿真系统在发生负荷突增后的频率响应曲线;
[0056]
图9是本发明实施例仿真系统在发生负荷突增后风机功率和转速响应曲线。
具体实施方式
[0057]
下为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0058]
如图1-9所示,本发明提供的基于变频极值时间的风机虚拟惯量评估方法及系统,通过计算为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0059]
图1是本发明实施例基于变频极值时间的风机虚拟惯量评估方法的流程图,如图1所示,包括以下步骤:
[0060]
步骤1:根据风电并网系统频率响应特性提出风机虚拟惯量评估方法;
[0061]
步骤2:建立风电高渗透系统的频率响应简化模型并计算变频极值时间;
[0062]
步骤3:根据风机的初始转速确定风机的运行状态约束;
[0063]
步骤4:根据变频极值时间约束和运行状态约束评估出风机在变频极值时间内的转速变化量范围和虚拟惯量范围。
[0064]
风电高占比系统遭遇有功扰动后,系统频率支撑应由同步发电机组和风电机组协同完成。为提升风能利用率,目前风电场通常不采用减载运行方式为一次调频预留备用。此模式下,虚拟惯性响应将是风电亟需具备的频率主动支撑功能。在风电并网系统中,同步发电机和风机应共同完成惯性支撑。
[0065]
以短时频率跌落为例,图2是发电机组的功率支撑与系统频率动态响应曲线。设t0为频率跌落时刻,tb为一次调频动作时刻,t
fm
为频率跌落至最低值的时刻,t
p
为一次调频结
束时刻。若t0时刻,负荷突增δpd,系统频率出现大幅度跌落,同步发电机组和风电机组需要快速响应频率变化,通过快速有功功率支撑补偿系统功率需求,即δpe=δpd。
[0066]
t0~t
fm
阶段:风机启动惯量支撑控制后,将分担同步发电机承担的不平衡功率,从而减缓系统频率跌落速度。风电机组常见的虚拟惯量控制采用微分环节,功率响应如下:
[0067]
δpw=-ki×
df/dt
ꢀꢀꢀ
(1)
[0068]
式中,δpw为风机惯性支撑功率;ki为微分控制系数;df/dt为频率变化率。在频率跌落期间(df/dt<0),此时虚拟惯量控制器的功率响应δpw>0。在此阶段,同步发电机和风电机组共同保持惯量支撑功率,并满足负荷需求δpd,风机通过释放动能,减轻了同步发电机的动能需求。
[0069]
t
fm
~t
p
阶段:在频率恢复期间(df/dt>0),此时虚拟惯量的功率响应δpw<0。在此阶段,风电机组在虚拟惯量控制下从系统吸收功率,风机由释放动能转为吸收动能,增加了同步发电机的一次调频负担,造成频率恢复速度减缓。
[0070]
考虑到虚拟惯量存在并网安全问题,目前,gb/t19963.1-2021《风电场接入电力系统技术规定》已规定风机接入系统后需要具备惯量支撑功能,但启动附加控制器须满足条件:δf
×
df/dt>0。显然,风机应将时间t
fm
设定为虚拟惯量控制的结束时刻,以满足并网要求。
[0071]
值得注意的是,确定惯性支撑结束t
fm
时刻,需要检测风机并网点处的频率信号,其中微分信号在现场测试中存在高频噪声,结合实际测试情况,以此为条件判断δf
×
df/dt是否大于零,实现难度很大。此外,在惯量支撑结束时刻,风电机组已释放动能,造成了转速降低。恢复至最大功率跟踪控制后,由于风力机转速已经下降,所以风电机组的输出功率仍然会低于频率跌落前的初始水平。因此,即使惯性控制能够及时结束,风机仍然会吸收功率,使转子加速,储存动能,完成最大功率跟踪目标,但这将不利于一次调频过程中的频率恢复。
[0072]
根据以上分析,在频率主动支撑期间内,风电机组的虚拟惯量控制无法持续为系统提供有效的有功功率支撑,结合并网标准中规定的惯量启动条件,本发明将惯量响应的有效时间定义为变频极值时间t
fm
,即系统遭受扰动后,频率由初始值跌落或抬升至频率偏差达到最大值需要经历的时间。
[0073]
显然,采用虚拟惯量控制前,若风机可以预估变频极值时间,不仅使附加控制具有了安全切除的保障,有效避免频率微分信号监测误差较大引起误操作,并且有利于解决目前困扰虚拟惯量量化评估的难题,进而为系统频率安全下的惯量需求提供更加可靠的计算方法。
[0074]
解决这一问题,须引入时间尺度对虚拟惯量进行约束。本发明将变频极值时间作为风机的惯性响应有效时间,在t0~t
fm
内,δωe与δf
max
标幺值相等,则风机虚拟惯性时间常数h
vir
可表示为:
[0075]
[0076]
式中,δωr为风机转速变化量;hw为风机固有惯性时间常数;δf
max
为频率偏差极值;ω
r0
为风机惯性响应前的初始转速;λ
opt
为最优叶尖速比;v为实时风速;r为风轮半径;ω
max
为风机稳定运行允许最大转速;v
min
为切入风速;v
max
为桨距控制启动前的最大风速。
[0077]
根据上式,在其他参数已知的情况下,δωr决定了h
vir
的大小。此时,根据变频极值时间内的转速变化量即可量化评估风机虚拟惯量大小。因此,计算系统变频极值时间,获得风机惯性响应后的转速变化量,将是评估风机虚拟惯量大小的关键。
[0078]
图3是风电高占比系统响应简化模型。风电高渗透系统受到功率扰动后的频率响应可看作由同步机、风机以及负荷的频率响应共同组成,可表示为:
[0079][0080]
式中,δpm为同步机功率响应信号;δpw为风机功率响应信号;δp
l
为负荷功率响应信号;h为系统惯性时间常数。其中,δpm取决于同步机的调差系数以及涡轮机参数,表示为:
[0081][0082]
式中,k为风电渗透率;σ为调差系数;a为涡轮机特征系数,t为涡轮机等值惯性时间常数,δf为频率偏差;δp
l
取决于负荷调节系数,表示为:
[0083]
δp
l
=k
l
×
δf
ꢀꢀꢀꢀꢀꢀ
(5)
[0084]
式中,k
l
为负荷调节系数。h则取决于系统容量及风电渗透率,表示为:
[0085][0086]
式中,hg为同步机惯性时间常数;sg为同步机装机容量;sb为系统总容量,根据以上分析可计算出系统频率响应δf(t)表示为:
[0087][0088]
式中,g(t)为功率响应信号和频率响应信号之间的传递函数,b、c、w、ζ、为计算参数,表示如下:
[0089][0090]
在不考虑风机惯性响应的前提下,将系统功率扰动等效成阶跃扰动,对上式进行求解得,系统的变频极值时间t
fm
可表示为:
[0091][0092]
图4是本发明实施例不同风电渗透率下频率响应曲线;取同步机的典型参数代入上式,计算可得在风电渗透率为0%、20%、40%时,系统的变频极值时间t
fm
分别为2.305s、
2.298s、2.295s。因此,在进行变频极值时间内的风机惯量评估时,可取变频极值时间t
fm
等于2.3s。在该时间内,通过风机运行状态约束即可计算出风机转速变化量,进而预估风机的虚拟惯量。
[0093]
风机的运行状态约束包括动能储备约束和风机功率约束。首先,风机虚拟惯量取决于其动能储备,与初始转速ω
r0
密切相关;此外,风机初始有功p
we0
决定了功率支撑δpw的调节范围,进而影响风机的动能释放或吸收能力。
[0094]
1)动能储备约束
[0095]
风机动能储备取决于变频极值时间段内的转速变化允许值。当扰动功率δpd>0时,系统出现功率缺额,风机需释放转子动能;当δpd<0时,系统则功率盈余,风机需吸收能量储存为转子动能。因此,风电机组的动能储备约束可表示为:
[0096][0097]
式中,δe
kwmax
为风机动能储备;ω
r0
为惯性响应开始时刻的风机转速;ω
min
、ω
max
分别为风机稳定运行的允许最低转速、最高转速,通常取值为0.7pu和1.2pu。在动能储备约束下,变频极值时间内δωr变化范围表示为:
[0098][0099]
式中,δω
rmax1
为动能储备约束下的最大转速变化量。
[0100]
2)风机功率约束
[0101]
为保障风机运行安全,虚拟惯性控制提供的支撑功率不允许越限。根据风机并网运行时的额定功率和最小功率可得风机功率约束表示为:
[0102][0103]
式中,pn为风机额定功率;p
min
为风机稳定运行的最小转速对应的功率;p
opt
为mppt控制下的风机有功输出功率;k
opt
为最大功率跟踪系数;ω
r0
为风机初始转速;ω
min
风机稳定运行的允许最低转速;δpd为功率扰动。
[0104]
在惯性响应过程中,风电机组的转子运动方程可表示为:
[0105][0106]
式中,p
we
为风机输出的电磁功率;p
wm
为风机所捕获的机械功率;hw为风机固有惯性时间常数;ωr为风机转速;δpw为风机功率响应信号。
[0107]
联立式(12)、(13),在风机功率约束下,变频极值时间内的δωr变化范围为:
[0108][0109]
式中,δω
rmax2
为风机功率约束下的最大转速变化量;k
opt
为最大功率跟踪系数;ω
r0
为风机初始转速;pn为风机额定功率;hw为风机固有惯性时间常数;t
fm
为变频极值时间;δpd为功率扰动。
[0110]
为同时满足动能储备约束和风机功率约束,风机最大转速变化量δω
rmax
可表示为:
[0111]
δω
rmax
=min{δ
rmax1
,δω
rmax2
}
ꢀꢀ
(15)
[0112]
式中,δω
rmax1
为动能储备约束下的最大转速变化量;δω
rmax2
为风机功率约束下的最大转速变化量。
[0113]
以2mw双馈风力发电机组典型参数为例,取hw=4s,k
opt
=1/1.23,ω
min
=0.7pu,ωmax
=
1.2pu,t
fm
=2.3s。图5是本发明实施例风机最大转速变化量评估结果。当δpd>0,风机需释放转子动能时,风机在初始转速较小时其动能储备较小但可提供的惯性支撑功率较大,此时δω
rmax
由动能储备约束决定;风机初始转速较大时其动能储备较大但可提供的惯性支撑功率较小,此时δω
max
由风机功率约束决定。风机在初始转速为0.905pu时,δω
rmax1
=δω
rmax2
,该初始转速下δω
rmax
达到最大为0.205pu。当δpd<0,风机需吸收能量时,δω
rmax
与转速约束的关系与δpd<0时完全相反,风机在初始转速较小δω
rmax
取决于风机功率约束,初始转速较大时δω
rmax
取决于动能储备约束,在初始转速为1.07pu时δω
rmax
达到最大为0.13pu。
[0114]
综上,在变频极值时间内,风机在其运行状态的约束下,当δpd>0时,可提供的转速变化量范围为0~0.205pu;当δpd<0时,可提供的转速变化量范围为0~0.13pu。
[0115]
由式(5)可知,其大小还取决于δf
max
。由于电力系统频率安全下限为48hz,则风机进行惯性响应后应将系统的频率偏差极值限制在该范围内。显然,由于风机具备快速功率响应能力,故可将其设定在频率安全范围内完成预定的虚拟惯量支撑。因此,本发明取δf
max
=2hz,用于保守估计风机虚拟惯量。根据δω
rmax
的评估结果,在变频极值时间内,风机最大惯性时间常数h
virmax
可表示为:
[0116]hvirmax
=min{h
virmax1
,h
virmax2
}
[0117]
式中,h
virmax1
、h
virmax2
分别为转子动能约束和功率约束下的风机最大惯性时间常数。
[0118]
图6是本发明实施例风机最大虚拟惯量评估结果。当δpd<0,风机释放转子动能转速下降时,在转速较低时h
virmax
取决于转子动能约束,转速较高时h
virmax
取决于风机功率约束,h
virmax
范围为0~18.61s;当δpd<0,风机在吸收能量转速升高时,在转速较低时h
virmax
取决于风机功率约束,转速较高时h
virmax
取决于转子动能约束,h
virmax
范围为0~13.85s。
[0119]
然而,系统实际响应过程中的δf
max
与其受到的扰动功率有关,当扰动功率较小时δf
max
会小于2hz,此时风机的h
virmax
将大于评估结果,可以保证风机具备可信的惯性支撑能
力。
[0120]
图7是本发明实施例风电高占比仿真系统拓扑图,本实施例基于digsilent/powerfactory仿真平台搭建风电场并入的三机仿真系统,该仿真系统包括两个容量为350mva的同步发电机和一个150台
×
2mw的双馈风电机组dfig,风电渗透率为30%,设置在t=2s时刻发生负荷突增30%。在初始转速分别为0.8pu和1.1pu下验证本发明所提基于变频极值时间的风机虚拟惯量评估方法的准确性。
[0121]
图8是本发明实施例仿真系统在发生负荷突增后的频率响应曲线;图9是本发明实施例仿真系统在发生负荷突增后风机功率和转速响应曲线。根据图8、9,当风机初始转速为1.1pu时,由图5、6理论分析可知,此时风机在t
fm
内的最大转速变化量为0.062pu,最大惯量为7.44s。如图8、9所示,当δpd>0,风机可释放的转子动能虽然较大,但由于受到功率约束,风机在变频极值时间内的转速变化量只有0.06pu,可将最大频率偏差提升0.3hz,风机表现出的最大惯量h
vir
=7.56s。
[0122]
当风机初始转速ω
r0
=0.8pu时,理论上风机在t
fm
内的最大转速变化量为0.1pu,最大惯量为8s。如图8、9所示,由于受到转子动能储备的约束,风机在变频极值时间转速下降至最小值0.7pu后,惯性响应立即退出,会造成频率的二次跌落,但由于该转速下可提供的惯性支撑功率较大,可将最大频率偏差提升0.4hz,风机在变频极值时间内表现出的最大惯量h
vir
=10s。仿真结果与计算结果接近,验证了本发明所提基于变频极值时间的风机虚拟惯量评估方法的准确性。
[0123]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0124]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
[0125]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。