1.本发明涉及机器人目标搜索技术领域,具体涉及基于三角锥的群机器人多目标搜索方法。
背景技术:
2.受自然启发的群体机器人是智能群体和机器人技术的结合,因其结构简单、成本低、高鲁棒性和灵活性等特点往往可以应用许多复杂危险的场景中,例如灾后搜救、资源勘探、目标搜索等。
3.近年来,机器人在目标搜索中的应用研究有了长足的发展。dadgar等考虑到群机器人多目标搜索的局限性和其工作空间的特点,提出了一种基于粒子群优化的分布式目标搜索算法,该算法不仅考虑了障碍物的规避还能有限避免陷入局部最优。tang等提出了一种基于约束因子粒子群优化的改进分组策略以解决群机器人在未知环境中协同搜索多个目标的问题,并在搜索过程中考虑了避障;仿真结果表明,该方法具有良好的适应性、准确性和高效性。li提出了一种新的基于概率有限状态机的搜索策略,该策略具有良好的稳定性,可以在探索和开发之间、并行性和协作能力之间取得良好的平衡。du提出了一种基于分布式粒子群算法,在进行群机器人目标搜索的同时考虑了机器人的通信限制和通信能耗,并且为有限处理必须同时搜索多个目标的情况提出了动态群划分方法。he提出了一种基于3d简化虚拟强制模型的多目标搜索算法,有效解决了复杂环境中无人机群的多目标搜索问题和实时避障问题。tang等提出了一种基于机械粒子群优化和人工势场的系统方案,该方法不仅密切考虑了真实机器人的实际应用,还包含基于模块切换策略的避障能力,并通过仿真和实验验证了该方法的有效性和鲁棒性。wang等针对避障与搜索效率的缺陷提出了边界扫描的避障策略和目标位置估计的粒子群算法,有效提高了避障和搜索效率。
4.然而在大多数研究中,群机器人所面临的障碍物大多为简单静态的,少有研究针对复杂动态非凸障碍物进行建模。对于避障策略大多采取势场法、简化虚拟力、碰撞锥等方法,对于搜索算法主要分为两类,一类是受群体智能算法的启发,例如粒子群算法、蚁群、狼群等,另一类是受其它方法的启发,例如机器人可以根据气味源进行定位的方法。然而无论是搜索算法还是避障策略,群机器人根据自身算法马上做出趋势反应,即群机器人在任务搜索过程中,需要时刻转动方向以搜寻目标,但是过多的转动不仅需要提供额外的能量,还会对机器人自身造成一定损害,并且移动机器人在搜索过程中并非时刻需要转动方向,若在决策下一步移动之前先判断转动方向的必要性,则能在保证搜索效率的同时减少转动次数以此减少能耗。
技术实现要素:
5.本发明要解决的技术问题就在于:本发明提供一种基于三角锥的群机器人多目标搜索方法,在提高机器人各项能力的同时重点考虑转变方向的必要性,减小不必要转角过程带来的时耗、能耗和机械磨损。
6.为解决上述技术问题,本发明提出的技术方案为:
7.一种基于三角锥的群机器人多目标搜索方法,所述多目标搜索方法在进行任务搜索之前,先对任务环境进行初始化,所述初始化参数至少包括群机器人系统参数、障碍物参数、目标参数,所述群机器人系统参数包括种群数量、机器人位置和速度信息;机器人在未探测到目标信息时为漫游搜索状态,机器人基于漫游方向锥开发全局环境;机器人在检测到目标信号之后,转为协同搜索状态,采用目标搜索锥模型进行局部搜索;机器人设有规避策略,所述规避策略优先级最高,所述机器人在探测范围内感知到威胁物,并利用规避策略进行预测规避;当机器人检测到的目标信号达到预设阈值时,视为搜索成功,当所有目标都搜索成功时,搜索完成。
8.作为上述技术方案的进一步改进为:
9.优选地,所述多目标搜索方法具体包括以下步骤:
10.步骤s1,建模
11.构建群机器人在二维任务环境中进行多目标任务搜索的模块,包括任务环境模型、目标激励模型以及任务分配模型,其中,任务环境模型构建群机器人多目标任务搜索所需的任务环境;目标激励模型用于构建机器人感知目标发出的信号模型;任务分配模型用于构建群机器人在进行目标搜索时的资源分配和子联盟形成过程;
12.步骤s2,基于三角锥的群机器人多目标搜索策略
13.设计适用于非凸障碍物的膨胀三角锥模型、用于搜索的漫游方向锥搜索方法和目标搜索锥搜索方法;漫游方向锥搜索方法用于漫游状态下的机器人开发未知全局环境,目标搜索锥搜索方法用于协同状态下的机器人局部搜索;再基于碰撞锥与膨胀三角锥结合设计规避策略进行预测规避;机器人按照搜索策略进行搜索,最终完成所有搜索目标。
14.优选地,所述步骤s1中,群机器人在非凸障碍物环境下进行多目标搜索时,先对任务环境进行初始化,其中,障碍物包括静、动态非凸障碍物;机器人在未知动态环境中进行任务搜索时,根据搜索到的信息选择下一步移动方向,并在探索过程中避开障碍物以及其它移动机器人;机器人在未知任务环境中探索时根据目标激励模型进行目标搜索;群机器人在动态环境中进行任务搜索时,在通信范围内进行信息交换,形成子联盟后协同合作搜索同一个目标。
15.优选地,所述步骤s2中,所述设计适用于非凸障碍物的膨胀三角锥模型的过程为:将机器人探测范围内搜集到的障碍物信息进行处理,设置能将探测范围内的障碍物全部被包围的三角锥,机器人质点以及三角锥与障碍物的两个交点形成一个三角形,通过求取三角形内切圆的信息得到参数信息,结合机器人大小将三角锥进行膨胀,得到膨胀三角锥。
16.优选地,所述设计适用于非凸障碍物的膨胀三角锥模型,包括以下步骤:
17.(1)将探测范围内的威胁物离散化,并获得对应的坐标:
[0018][0019]
机器人由传感器获得自身的位置,设某时刻机器人的位置为计算到每个坐标的向量,得到每两个向量之间的夹角集合;:
[0020][0021]
找到最大的夹角并获得其对应的两个坐标:设此刻机器人的位置为则三点构成的三角形内切圆为po=[xo,yo],三角锥威胁半径为r
tc
;
[0022]
计算三角锥的半顶角β1,以及相对速度与内切圆圆心的夹角
[0023][0024][0025]
(2)根据机器人尺寸大小,对三角锥进行膨胀,需要膨胀的部分为β2:
[0026][0027]
其中,机器人的尺寸半径为rr,分别为当前机器人ri与障碍物o
s1
、o
s2
之间的欧式距离;膨胀三角锥的半顶角β=β1 2*β2;
[0028]
(3)设计基于碰撞锥与膨胀三角锥的规避策略:机器人之间的避碰使用碰撞锥模型,静、动态非凸障碍物使用膨胀三角锥模型。
[0029]
优选地,所述碰撞锥模型的构建方式为:将机器人当作质点,将障碍物按照障碍物的威胁半径和机器人的大小膨胀为一个半径为r的威胁圆,设从机器人位置处引一条射线l,l与威胁圆的交点为m,从机器人位置处引出的射线能与威胁圆有交点的所有射线的集合统称为碰撞锥,机器人与障碍物的相对速度矢量落在碰撞锥区域外,机器人避免与障碍物发生碰撞。
[0030]
优选地,所述漫游方向锥搜索方法采用基于漫游方向锥的漫游搜索策略,所述漫游搜索策略为增加机器人每步的步长以及避开机器人之前的位置方向;漫游方向锥采取避开机器人能够探测到目标的最大距离范围内的所有机器人;机器人在决策下一步移动方向之前,通过漫游方向锥判断转动方向的必要性,若上一时刻速度方向落在漫游方向锥可行范围内,则无需转动方向。
[0031]
优选地,所述目标搜索锥搜索方法采用基于目标搜索锥的协同搜索策略,包括以下三种情况:
[0032]
(1)当机器人当前位置为个体最优或种群最优时,机器人首先根据当前方向预测下一时刻机器人位置,下一时刻机器人位置作为目标搜索锥的圆心,以机器人半径为目标搜索锥半径;
[0033]
(2)当机器人当前位置既不为个体最优也不为种群最优且个体最优位置不同于种群最优位置时,机器人以个体最优与种群最优的夹角方向为下一步搜索方向范围;
[0034]
(3)当机器人当前位置既不为个体最优也不为种群最优但个体最优位置等同于种群最优位置时,机器人以个体最优位置为圆心、机器人最大速度为目标搜索锥半径用以扩
大搜索范围。
[0035]
本发明提供的基于三角锥的群机器人多目标搜索方法,与现有技术相比有以下优点:
[0036]
(1)本发明的基于三角锥的群机器人多目标搜索方法,针对未知动态非凸障碍物环境下的避障能力问题、全局开发能力问题以及局部搜索能力问题,在提高各项能力的同时重点考虑转变方向的必要性,减小不必要转角过程带来的时耗、能耗和机械磨损。mstc策略的提出分为三个方面,对于障碍物规避问题,etc避障模型可以更好地解决复杂动态非凸障碍物环境下的避障问题;rdc策略有效提高了机器人开发未知环境的能力,进而提高完成任务搜索的效率;对于局部搜索能力问题,tsc策略能够避免机器人陷入局部最优的同时有效提高了局部搜索能力,最终提高完成目标搜索的效率。此外,三种方法在下一刻移动之前可以先行判断转动方向的必要性,从而减少转角次数。
[0037]
(2)本发明的基于三角锥的群机器人多目标搜索方法,针对未知动态非凸障碍物环境下避碰问题以及多目标搜索问题,重点考虑转变方向的必要性,从而减小群机器人在任务搜索过程中不必要的转角过程,即减少转角过程带来的时耗、能耗及机械磨损。对于障碍物规避问题,本发明改进碰撞锥模型提出了一种适用于复杂动态非凸障碍物的避碰模型,即膨胀三角锥(etc),该方法不仅能有效规避障碍物,还能预测碰撞冲突以减小不必要的避碰过程。
附图说明
[0038]
图1是本发明的群机器人多目标搜索的任务环境图。
[0039]
图2是本发明实施方式中机器人的三种状态迁移关系示意图。
[0040]
图3是本发明实施方式中碰撞锥模型的示意图。
[0041]
图4是本发明实施方式中膨胀三角锥模型的示意图。
[0042]
图5是本发明实施方式中机器人避碰模型的示意图。
[0043]
图6是本发明实施方式中漫游方向锥模型的示意图。
[0044]
图7(a)是本发明实施方式中机器人当前位置为个体最优/种群最优位置的目标搜索锥模型示意图。
[0045]
图7(b)是本发明实施方式中机器人当前位置既不为个体最优也不为种群最优且个体最优位置不同于种群最优位置的目标搜索锥模型示意图。
[0046]
图7(c)是本发明实施方式中机器人当前位置既不为个体最优也不为种群最优但个体最优位置等同于种群最优位置的目标搜索锥模型示意图。
[0047]
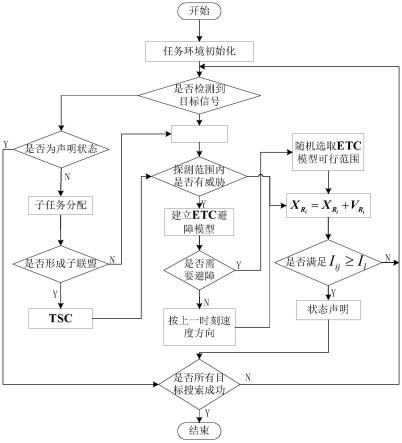
图8是本发明未知动态复杂非凸障碍物环境下群机器人多目标搜索流程图。
[0048]
图9(a)是本发明方法进行验证时rdc仿真实验中初始时刻的环境图。
[0049]
图9(b)是本发明方法进行验证时rdc仿真实验中t=30~40的环境图。
[0050]
图9(c)是本发明方法进行验证时rdc与etc仿真实验中t=60~70的环境图。
[0051]
图9(d)是本发明方法进行验证时tsc与etc仿真实验中t=70~89的环境图。
[0052]
图9(e)是本发明方法进行验证时tsc仿真实验中t=140~167的环境图。
[0053]
图9(f)是本发明方法进行验证时tsc仿真实验中t=229的环境图。
[0054]
图9(g)是本发明方法进行验证时tsc仿真实验中t=229的环境图。
[0055]
图9(h)是本发明方法进行验证时找到目标位置的机器人在整个搜索过程中全部路径示意图。
[0056]
图10(a)是本发明方法进行验证时6种模式下群机器人种群数量和迭代次数关系对比统计图。
[0057]
图10(b)是本发明方法进行验证时6种模式下群机器人种群数量和转角次数关系对比统计图。
具体实施方式
[0058]
以下对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
[0059]
如图1至图4所示,本发明基于三角锥的群机器人多目标搜索方法,包括以下步骤:
[0060]
步骤s1,建模
[0061]
群机器人在二维任务环境中进行多目标任务搜索需要多个模块的搭建构成,主要分为:任务环境模型、目标激励模型以及任务分配模型。其中,任务环境模型主要构建群机器人多目标任务搜索所需的任务环境,包括机器人、目标、障碍物等;目标激励模型主要用于构建机器人感知目标发出的信号模型;任务分配模型用于群机器人在进行目标搜索时的资源分配和子联盟形成过程。
[0062]
步骤s1-1,任务环境模型
[0063]
群机器人在二维动态非凸障碍物环境下进行多目标搜索时,其任务环境主要由三部分组成:机器人ri{i=1,2,
…
,nr}、目标tj{j=1,2,
…
,n
t
}以及障碍物os{s=1,2,
…
,no}。其中,障碍物包括静、动态非凸障碍物,如图1所示为举例说明的群机器人多目标搜索的任务环境图。任务环境为1000
×
1000unit,小圆点
‘●’
表示机器人,五角星
‘☆’
表示要搜索的目标,灰色不规则物体为需要机器人避开的障碍物。机器人在未知动态环境中进行任务搜索时,根据搜索到的信息自主选择下一步移动方向,并在其探索过程中避开静、动态非凸障碍物以及其它移动机器人。目标是未知的,机器人在任务环境中探索时根据目标激励模型进行目标搜索。某时刻动态障碍物的位姿信息遵循如下移动模型:
[0064][0065]
其中,为t时刻障碍物os所在位置矢量,为障碍物在二维笛卡尔坐标系下的坐标位置,为t时刻障碍物os的速度矢量,为t时刻障碍物os与x轴正向的夹角,v
om
为障碍物在地图上移动的速度最大值。
[0066]
群机器人在任务搜索时,可以根据自身携带的传感器感应到周围环境,并据此做
出反应趋势。当感应到的距离小于一定阈值时,机器人选择避障机制,根据避障机制判断下一步行动。并且,群机器人在移动过程中,可以在其通信范围d
com
内相互通信,以此来交换信息共同协作搜索目标。
[0067]
群机器人在动态环境中进行任务搜索时,任务目标未知,但是机器人可以根据自身携带的传感器感应到目标发出的信号,假设机器人感应到目标信号的强弱与机器人到目标的距离成正相关,当机器人感应到的目标信号强度达到一定阈值i
l
时,视为成功搜索到该目标;当任务环境中所有目标被搜索成功时,则群机器人多目标搜索任务完成,机器人停止任务搜索。
[0068]
步骤s1-2,目标激励模型
[0069]
群机器人在动态环境中进行任务搜索时,事先对目标是未知的,但可以根据自身携带的传感器感知到目标发出的信号,设目标发出信号的检测激励模型如下:
[0070][0071]
其中,i
ij
表示机器人ri对目标tj的响应函数,其与机器人到目标的距离d有关,并与距离平方成反比;m表示目标信号在动态环境中传播时的衰减系数;q是目标所携带的传感器发出的恒定功率;rand()表示目标信号在动态环境中传播下的随机扰动;dm表示机器人能探测到目标信号的最大感应距离。
[0072]
步骤s1-3,任务分配模型
[0073]
群机器人在动态环境中进行任务搜索时,可以在其通信范围内进行信息交换,并且共同协同合作以快速搜索到目标。因此,群机器人在进行任务搜索时,其状态可以分为三种:漫游搜索状态(roaming search status,rss)、协同搜索状态(collaborative search status,css)以及声明状态(declaration status,dc),如图2所示,为机器人在任务搜索时三种状态的迁移关系。机器人在协同搜索状态可以形成子联盟共同搜索同一个目标。若机器人同时有多个备选目标,则优先选择上一步相同的目标,若无相同的目标则按照轮盘赌法选择当前唯一的目标,轮盘赌公式如下:
[0074][0075][0076]
其中,ki表示机器人ri作为备选目标的数量,p
ij
表示备选目标j被选中的概率,p(i,j)指备选目标j的累计概率,当p(i,j-1)《ra《p(i,j)时,机器人ri选择目标tj作为协同搜索的目标,其中ra为区间(0,1)内的均匀随机数。
[0077]
表1是t=60时子群联盟sub9排序机制,其中ⅰ类指可直接探测到目标信息的机器人,ⅱ类指只有通过与ⅰ类通信才能获得目标信息的机器人,根据子联盟机制选择机器人的优先原则可知,其优先排序为:r
19
》r
33
》r6》r
28
》r
18
》r
39
》r
34
》r
11
》r8。
[0078]
表1 subgroup sub9 alliance ranking mechanism(t=60)
[0079][0080]
设定当子群联盟搜索同一目标时,若子群联盟成员数量过多则导致搜索区域拥挤,此时机器人之间优先考虑避碰,再选择接近目标,由此可见,成员数量过多可能会过多消耗搜索时间,设置子联盟成员数量nm遵循公式(5):
[0081][0082]
其中,nⅰ代表ⅰ类机器人数量,当ⅰ类机器人过少时,需紧急招募联盟成员,以保证联盟的多样性,当ⅰ类机器人数量达到一定值nm时,此时联盟成员数量不需过多以免发生堵塞。
[0083]
步骤s2,基于三角锥的群机器人多目标搜索策略
[0084]
群机器人在未知非凸复杂环境中进行任务搜索,为了尽快找到所有目标,常用的方式是减少迭代次数,因此会忽略机器人每次转动方向所消耗的时间、能量以及机械磨损等问题。本实施例中,提出适用于动态非凸障碍物的etc模型、用于搜索的漫游方向锥和目标搜索锥方法,不仅能安全有效的避开静、动态非凸障碍物,还能提前规避不必要的避碰过程;漫游方向锥和目标搜索锥分别增强机器人开发未知全局环境和探索局部环境的能力,因此这三个方法都能在提高搜索效率的同时,有效减少机器人在移动过中不必要的转角过程,从而进一步减少转角过程带来的时耗、能耗和机械磨损。
[0085]
步骤s2-1,构建群机器人系统运动控制模型
[0086]
群机器人在动态非凸障碍物环境中移动遵循如下运动模型:
[0087][0088]
其中,为t时刻机器人ri所在位置矢量,为机器人在二维笛卡尔坐标系下的坐标位置,为t时刻机器人ri的速度矢量,为t时刻机器人ri与x轴正向的夹角,v
rm
为机器人在地图上移动的速度最大值。
[0089]
步骤s2-2,群机器人在任务环境中的规避策略
[0090]
现有的群机器人多目标搜索方法研究中,为了便于分析结果,设置的障碍物多为结构简单、形状单一,且多为静态障碍物。但是到实际的搜索环境,障碍物多为不定因素,即为复杂非凸且动态的环境。因碰撞锥可以预测障碍物的运动方向且可以通过简单的几何关系判断而广泛地应用在动态障碍物避碰中,但用碰撞锥来避碰的障碍物大多为圆或者球这种简单、单一的障碍物。
[0091]
本实施例中,针对复杂动态非凸障碍物进行建模,并应用三角锥避障模型实时预测机器人与障碍物的行动轨迹以此来判断是否需要规避,然后根据判断结果决策下一步运动。将用于非凸障碍物避碰的三角锥模型与用于机器人之间的碰撞锥模型结合建立群机器人系统在任务环境中的避障策略。本实施例中,为了解释说明将机器人避障范围内探测到的非凸静、动障碍物及其它机器人统称为威胁物,规避策略的设计包括以下步骤:
[0092]
步骤s2-2-1,构建碰撞锥模型
[0093]
将机器人当作质点,而将障碍物按照障碍物的威胁半径和机器人的大小碰撞为一个半径为r的威胁圆,设从机器人位置处引一条射线l,l与威胁圆的交点为m,即从机器人位置处引出的射线能与威胁圆有交点的所有射线的集合统称为碰撞锥,机器人与障碍物的相对速度矢量落在碰撞锥区域外,机器人就可以避免与障碍物发生碰撞。
[0094]
如图3所示为碰撞锥模型,其中为相对速度矢量v
re
与位置矢量r
ies
的夹角,r
ies
表示机器人ri到障碍物es的向量,分别表示r
ies
投影在x、y轴上的值;是相对速度矢量v
re
与x轴的夹角,其中相对速度矢量是指机器人ri速度矢量与障碍物es速度矢量的相对速度矢量;β为cc的半顶角,r为障碍物es的威胁半径,是r
ies
与x轴的夹角。当时,障碍物es具有威胁性,机器人ri需要对es进行避碰;当时,es不具有威胁性,机器人ri不需要避碰。对相关参数求解可得:
[0095][0096][0097][0098][0099]
步骤s2-2-2,基于etc的动态非凸障碍物避障模型
[0100]
机器人在复杂动态非凸障碍物环境下移动过程中,其预先未知障碍物具体位置和形状,仅能通过自身携带的传感器判断其探测范围内是否有障碍物,并将探测到的障碍物信息返回至机器人系统,然后机器人系统根据自身算法(机器人在运行过程中已经设置好的算法,此算法是机器人常规设置手段,在此不做过多的描述)判断是否需要避障,并根据判断结果做出趋势反应。
[0101]
传统的碰撞锥避障方法大多将威胁物转变成具有一定威胁半径的圆或者椭圆,但在实际搜索环境中,障碍物多为不规则图案,若全部转为圆或者椭圆这种特殊的形状,则会
过多地浪费搜索资源环境,造成不必要的避碰过程。本实施例中采用膨胀三角锥的方法,在解决复杂非凸障碍物的规避问题同时还能有效减少不必要的规避过程,图4所示为机器人在动态环境中探测到障碍物信息时的避障模型。设机器人的探测半径为dr,将探测范围内搜集到的障碍物信息进行处理,找到使得探测范围内的障碍物能够全部被包围的三角锥,这样机器人质点以及三角锥与障碍物的两个交点便可形成一个三角形,通过求取三角形内切圆的信息便可求得类似碰撞锥的相关参数信息。考虑到机器人具有一定尺寸,结合机器人大小将三角锥进行膨胀,得到膨胀三角锥。
[0102]
具体包括以下步骤:
[0103]
步骤s2-2-2-1,将探测范围内的威胁物离散化,并获得对应的坐标:
[0104][0105]
机器人由传感器获得自身的位置,设某时刻机器人的位置为计算到每个坐标的向量,得到每两个向量之间的夹角集合;
[0106][0107]
找到最大的夹角并获得其对应的两个坐标:机器人自身的位置由传感器获得。设此刻机器人的位置为则三点构成的三角形内切圆po=[xo,yo]及三角锥威胁半径r
tc
可以得出。
[0108]
求得三角锥的半顶角β1,以及相对速度与内切圆圆心的夹角
[0109][0110][0111]
步骤s2-2-2-2,考虑到机器人有大小和尺寸,为使机器人安全移动,在计算三角锥时应按照机器人尺寸大小进行膨胀,则,需要膨胀的部分为:
[0112][0113]
其中,机器人的尺寸半径为rr,分别为当前机器人ri与障碍物o
s1
、o
s2
之间的欧式距离。由此,膨胀三角锥的半顶角β=β1 2*β2。
[0114]
步骤s2-2-2-3,设计基于碰撞锥与膨胀三角锥的规避策略
[0115]
群机器人完成任务的前提是保证自身的安全移动,因此,安全有效地进行机器人规避是首要考虑的问题。而规避不仅需要避开静、动态非凸障碍物,还应该保证机器人之间能够安全有效地避开。
[0116]
本实施例中的机器人是半径为rr的机器人,机器人之间的避碰可以使用碰撞锥模型,而静、动态非凸障碍物使用膨胀三角锥避障模型。如图5为机器人某一时刻在其探测范围内的规避模型,根据自身传感器检测到周围的威胁物,分别按照膨胀三角锥或碰撞锥模
型计算机器人下一步可行范围,并在可行区域范围内随机选择一个方向作为下一步速度方向,其中用于机器人避碰的cc威胁半径为r=2
×rr
。
[0117]
步骤s2-2-3,基于rdc的漫游搜索策略
[0118]
群机器人在任务环境进行移动搜索的过程中,造成搜索效率较低的最大原因是产生重复搜索,而重复搜索主要有两方面来源:1)自身机器人产生的重复搜索;2)其它机器人产生的重复搜索。
[0119]
本实施例中,为了避免机器人产生的重复搜索,即机器人在动态环境中进行任务搜索时,存在同一个机器人在同一片区域重复进行搜索,对于这一点,漫游方向锥通过增加机器人每步的步长以及避开机器人之前的位置方向来解决,因此,在漫游搜索过程中,机器人将以最大步长移动且避开前一时刻位置。
[0120]
本实施例中,为了避免其它机器人产生的重复搜索,即机器人所探索的区域可能是其它机器人已经探索过的区域,漫游方向锥采取避开机器人dm范围内的所有机器人,其中的dm为机器人能够探测到目标的最大距离,避开dm范围内的机器人可以防止错过目标,也能使机器人均匀地分布于开发的区域中。机器人的避开角度范围与机器人之间的距离相关,即距离越小,避开的范围越大,其中,d0=v
rm
rr。机器人在决策下一步移动方向之前,可以提前通过漫游方向锥判断转动方向的必要性,若上一时刻速度方向落在漫游方向锥可行范围内,则无需转动方向。
[0121][0122]
如图6所示,为t时刻机器人ri的漫游方向锥,在漫游时刻,机器人以最大速度v
rm
并能避开周围机器人,采取的措施为:机器人以t-1时刻位置为漫游方向锥圆心,半顶角为90度,分别以t时刻机器人r
j1
、r
j2
、r
j3
位置为圆心,半顶角β
*
遵循公式(16)。
[0123]
处于漫游状态的机器人速度更新公式为:
[0124][0125]
其中,rdc表示漫游方向锥。
[0126]
步骤s2-2-4,基于目标搜索锥的协同搜索策略
[0127]
传统的机器人在进行多目标搜索时,大多采用粒子群算法,然而粒子群容易陷入局部最优,收敛速度不够快等因素。本实施例中,基于目标搜索锥的多目标搜索策略,机器人在动态非凸障碍物环境中进行任务搜索时,当探测到目标发出的信号时,机器人的状态由漫游状态转为协同搜索状态。
[0128]
目标搜索锥是基于群体最优方向和个体最优方向之间所包含的区域作为下一步搜索范围,使得群机器人在快速接近目标的同时又能保持种群的多样性。主要分为两个方面:方向和步长。在方向上,预测目标方向范围并使机器人转向目标方向范围;预测的目标方向范围并不单一指向一个特定因素,在协同搜索过程中,为保证种群的多样性,联盟中的成员一般综合考量其惯性因素、认知因素和社会因素,而目标搜索锥也在群机器人搜索过程中根据不同情况分别考量这些因素。包括以下三种情况:
[0129]
(1)当机器人当前位置为个体最优或种群最优时,机器人更多考虑其惯性因素,因此机器人首先根据当前方向预测下一时刻机器人位置,并将此位置作为目标搜索锥的圆心,以机器人半径为目标搜索锥半径,如图7a)所示。
[0130]
(2)当机器人当前位置既不为个体最优也不为种群最优且个体最优位置不同于种群最优位置时,机器人综合考量其认知因素和社会因素,即以个体最优与种群最优的夹角方向为下一步搜索方向范围,如图7b)。
[0131]
(3)当机器人当前位置既不为个体最优也不为种群最优但个体最优位置等同于种群最优位置时,如图7c),此时认知因素和社会因素相同,只需考虑其一即可。为扩大种群多样性,机器人将以个体最优位置为圆心、v
rm
为目标搜索锥半径以扩大其搜索范围。
[0132]
机器人按照上述方法将速度方向落入目标搜索锥范围内,靠近目标,并且每次靠近不是单一靠近一个方向,而是在一定范围内随机选择一个方向,可以避免陷入局部最优并增加种群多样性。此外利用目标搜索锥可以判断是否需要转动方向,用以减少不必要的转角过程。
[0133]
进一步地,在进行群机器人多目标搜索过程中,过长的步长可能会导致错过目标,造成不必要的重复搜索且会增加能耗,而过短的步长则会导致搜索时耗加长。本实施例中采用基于目标响应信号的非线性递减步长函数,步长与探测到的目标信号有关,当探测到的目标信号越小时,说明机器人离目标较远,此时应该加大步长,而当探测到的目标信号越大时,说明机器人离目标较近,此时应该减少步长,避免错过探测到的目标。基于目标响应信号的非线性递减步长函数为:
[0134][0135]
其中,i
l
为设定的目标信号阈值,i
ij
(t)为t时刻处于协作搜索状态的机器人ri与目标tj的信号强度,而l的范围控制在(l
min
,l
max
)。
[0136]
处于漫游状态的机器人速度更新公式为:
[0137][0138]
其中,tsc表示目标搜索锥。
[0139]
则群机器人在二维环境中搜索过程中的位移更新公式:
[0140][0141]
步骤s2-3,群机器人多目标搜索控制策略
[0142]
如图8所示,为二维未知复杂动态非凸障碍物环境下群机器人多目标搜索流程图。在进行任务搜索之前,首先对任务环境进行初始化,包括群机器人系统、障碍物、目标等参数的初始化,其中群机器人系统的参数化包括种群数量、机器人位置和速度信息;群机器人在未探测到目标信息之前保持漫游搜索状态,并基于rdc使得机器人快速开发全局环境;在检测到目标信号之后,机器人转为协同搜索状态,并利用tsc模型进行局部搜索;避障过程贯穿整个过程并且优先级最高,即无论机器人处于漫游状态还是协同搜索状态,只要机器人在dm范围内探测到威胁物,便采用碰撞锥与膨胀三角锥结合的规避策略进行预测规避;
当机器人检测到的目标信号达到预设阈值时,则该目标视为搜索成功,当所有目标都搜索成功时,搜索完成。
[0143]
方法验证
[0144]
对本实施例中的搜索方法进行验证,包括以下步骤:
[0145]
步骤1、建立系统参数设置及群机器人任务搜索性能评价指标模型,任务环境参数设置如表2。
[0146]
表2任务环境参数设置
[0147]
符号意义设定值nr群机器人数量30~100n
t
目标数量10no障碍物数量7s搜索区域(unit)1000
×
1000rr机器人半径2v
rm
机器人运行最大速度10v
om
动态障碍物运行速度1dm目标、威胁物最大感应半径30d
com
机器人最大通信距离300q目标信号能量105m目标信号衰减系数0.1i
l
目标信号阈值400n
mⅰ类机器人数量阈值4l
max
步长最大值10l
min
步长最小值5
[0148]
从2个方面评价群机器人任务搜索的性能:系统时耗tr和转角次数na,其中系统时耗即为任务完成时的迭代次数,而转角次数是指机器人在搜索的过程中改变上一时刻方向的次数。设t
r1
、t
r2
、t
r3
,n
a1t
、n
a2t
、n
a3t
,n
r1t
、n
r2t
、n
r3t
分别为t时刻机器人处于漫游时刻、协同搜索时刻以及声明时刻的时耗、转角次数以及机器人数量,其中n
r|t
=n
r1|t
n
r2|t
n
r3|t
,tk为单个目标tk搜索成功耗时,则tk与tr,na与n
a1|t
、n
a2|t
、n
a3|t
,有如下关系:
[0149][0150]
[0151][0152]
其中,n
rk
为搜索目标tk形成的子联盟成员个数,由于处于声明状态的机器人不再参与其他的搜索任务,其速度为0,位置保持不变,因此,处于声明状态的机器人对于后续任务搜索的转角次数na不造成影响,即n
a3
=0。
[0153]
步骤2、验证试验
[0154]
在二维未知动态环境的搜索过程中,考虑复杂静、动态非凸障碍物,以nr=50为例,具体说明基于多目标搜索策略(mstc)下的群机器人多目标搜索论证实验过程,如图9所示。
[0155]
步骤2.1、基于膨胀三角锥(etc)仿真实验过程
[0156]
图9(c)、9(d)演示了基于etc的规避过程。图9(c)中机器人r
12
在其探测范围内检测到障碍物信息,并根据etc判断出若继续沿着当前方向前行会碰到障碍物,因此,r
12
根据etc计算其可行范围并进行规避障碍物。在图9(d)中,机器人r6检测到障碍物信息,但是根据etc判断按照当前时刻移动不会发生碰撞,因此机器人r6不需要改变方向;而r
36
、r
44
在检测到障碍物信息时根据etc判断沿着当前时刻方向移动会发生碰撞,因此r
36
、r
44
按照etc计算可行范围,并在可行范围中随机选择一个方向移动;同理,r
45
在检测到障碍物信息时根据etc判断出会发生碰撞,因此机器人r
45
根据etc改变方向;而r
49
判断出不会发生碰撞,因此不需要改变方向。
[0157]
步骤2.2、基于漫游方向锥(rdc)仿真实验过程
[0158]
初始时刻,机器人处于100
×
100unit,它们位置随机,且当前状态都为漫游搜索状态,因此,它们将按照rdc方法向周围扩散以开发环境,如图9a)所示。图9(b)为t=30-40时刻处于漫游状态下的机器人跟据rdc进行全局环境开发的过程,此时机器人正在快速的开发未知环境,并且目标9已被机器人r
23
搜索成功。图9(c)为t=60-70期间处于漫游状态下的机器人根据rdc开发全局环境的过程,可以看到机器人正在向未知环境进行开发探索。该策略可以在不获取先验信息的情况下以最大速度遍历搜索空间,具有很强的未知环境开发能力。
[0159]
步骤2.3、基于目标搜索锥(tsc)仿真实验过程
[0160]
图9(d)为t=70~89基于tsc搜索目标10的过程。t=70时,机器人r
38
、r
16
作为ⅰ类机器人探测到目标10发出的信号并迅速结成子联盟sub10,此时子联盟成员数量小于nm,因此sub10紧急向周围发布招募信息,而r8、r
15
接收到信息并作为ⅱ类机器人加入子联盟sub10,并按照tsc策略共同搜索目标10。t=89时,子联盟sub10中机器人r
15
成功搜索到目标10,sub10解散,其余成员转为漫游搜索状态继续搜索其它机器人。
[0161]
图9(e)为t=140~167子联盟sub7按照tsc策略的搜索过程。t=140时,机器人r
34
检测到目标7发出的信号,并与通信范围内机器人交互,r6、r
11
、r
44
通过交互与r
34
形成子联盟sub7,并利用tsc策略共同搜索目标7,t=167时,机器人r
34
成功搜索到目标7,子联盟sub7
解散。
[0162]
t=229时,机器人r
11
检测到目标4发出的信号,而r6、r
44
接受到ⅰ类机器人r
11
发出的信息并与之结成联盟sub4共同搜索目标4,如图9(f)所示。t=251时,机器人r
44
的目标响应信号达到阈值,视为目标4搜索成功,如图9(g),此时所有目标搜索完成,标志此次搜索任务完成。
[0163]
步骤2.4、基于三角锥的群机器人多目标搜索策略(mstc策略)的仿真实验过程
[0164]
图9(h)为找到目标位置的机器人在整个搜索过程中全部路径,而图中的静、动态障碍物皆为任务完成时的最终状态,虽然图中显示的机器人部分轨迹与障碍物有所重合,但在仿真实验实际运行过程中,机器人未曾碰到过障碍物,具体可看图9(c)、(d)中的机器人避碰过程。图9(h)中机器人在漫游状态下基于rdc进行全局环境的开发,通过rdc可以先预测当前方向有无改动方向的必要性再抉择下一步移动方向,在探测到目标时先基于tsc判断当前方向的可行性,若当前方向落在tsc范围内,则无需改动方向,使得机器人更加快速的搜索到目标。例如搜索到目标9和目标8的机器人r
23
、r
49
,是基于tsc判断准则在没有过多转动方向的情况下快速搜索到了目标。而其余的机器人也是在判断当前方向落在可行区域范围内的情况下选择不转动方向以快速的接近目标。在移动过程中,除了障碍物的威胁,还有来自其它机器人的碰撞威胁,而规避威胁物的优先级最高,即当遇到威胁物时先利用etc判断是否需要避碰再决策下一步移动方向,以确保机器人安全移动。因此,图9(h)中的其它机器人也有不可避免的转动方向过程。
[0165]
步骤2.5、仿真对比实验
[0166]
本实施例设置了六组对比实验来分析动态非凸障碍物环境下多目标搜索的两个性能指标,如表3所示。其中,svf、lsdn、kcpso分别是简化虚拟受力避障方法、与近邻不同的直线搜索方式、具有运动学约束的粒子群优化算法,而etc、rdc、tsc分别是发明中的避障方法、漫游搜素策略以及协同搜索策略,其中mode6为本实施例中三个方法结合形成的多目标搜索策略(mstc策略)。
[0167]
表3二维未知动态环境下群机器人多目标搜索模式
[0168]
模式避障策略漫游搜索策略协同搜索策略mode1svflsdnkcpsomode2svfrdckcpsomode3svfrdctscmode4etclsdnkcpsomode5etcrdckcpsomode6etcrdctsc
[0169]
按照机器人数量20、40、60、80、100,在上述六组模式下分别独立进行仿真实验30次,记录每次运行完成后的机器人搜索时间、转角次数,并求取平均值以及最大、最小值,得到的数据如表4。
[0170]
表4不同规模的群机器人系统在6种模式下的性能比较
[0171][0172][0173]
将种群大小nr作为横轴,tr、na作为纵轴,如图10所示,随着种群数量nr增加,搜索耗时tr在逐渐减小,而转角次数除了跟种群大小有关还与迭代次数相关。
[0174]
步骤2.6、仿真结果分析
[0175]
由图10可知,转角次数会随着时耗增加而增加,因此在后续的数据对比中,用转角次数除以时耗计算。
[0176]
步骤2.6.1、etc对比结果分析
[0177]
建立了三组对比实验,分别是mode1与mode4、mode2与mode5、mode3与mode6,这三
组对比试验是在漫游搜索策略和协同搜索策略相同的情况下分别对etc与svf进行对比的。对于mode1与mode4,在漫游搜索策略同为mstc、协同搜索策略同为kcpso时,etc相比svf转角次数减少了0.04%~5.64%,时耗减少了0.73%~6.13%;对比mode2与mode5,其转角次数及时耗分别减少了0.19%~10.09%、0.81%~6.13%;对比mode3与mode6,其转角次数及时耗分别减少了1.68%~8.68%、3.50%~13.85%。
[0178]
群机器人在进行任务搜索时,会因规避威胁物而放弃原规划的最优路线,而etc不仅能安全避开威胁物,同时还能预测规避的必要性,减少了不必要的避碰过程,并在一定程度上减少时耗和转角次数。
[0179]
步骤2.6.2、rdc对比结果分析
[0180]
为比较rdc在搜索性能上的特点,建立了两组对比实验,分别是mode1与mode2、mode4与mode5。这两组对比实验是在避碰策略与协同搜索策略相同而漫游策略不同的情况下进行。由表4中的mode1、2可知,当避障策略和协同搜索策略都为svf、kcpso,而漫游策略由lsdn转为rdc时,搜索效率提高了1.02%-13.32%;此时转角次数减小了24.96%-52.45%。对于mode4、5,当避障策略和协同搜索策略都为etc、kcpso,而漫游策略由lsdn转为rdc时时,其搜索效率提高了1.4%-13.46%;此时转角次数减小了21.13%-54.52%。
[0181]
基于rdc的漫游搜索策略可以在保证不错过目标的情况下均匀地探索未开发的环境,在一定程度上提高了全局环境的搜索能力,进而提高完成整个任务搜索的效率。由于rdc可以先行判断当前方向是否落在可行区域再决策下一步移动,在很大程度上减少转角次数,进而减小转角过程带来的时耗、能耗和机械磨损。
[0182]
步骤2.6.3、tsc对比结果分析
[0183]
为比较tsc在搜索性能上的特点,将tsc与kcpso进行两组对比实验分析。对于mode2、3,当避障策略和漫游策略都为svf、rdc,而协同搜索策略由kcpso转为tsc时,其效率提高了2.6%-11.18%;此时转角次数减小了8.89%-18.60%。对于mode5、6,当避障策略和漫游策略都为etc、rdc,而协同搜索策略由kcpso转为tsc时,其效率提高了10.61%-22.9%,此时转角次数减小了3.68%-22.91%;
[0184]
基于tsc的协同搜索策略,可以在保证种群多样性的同时快速向目标靠近,有效提高了机器人局部搜索能力。tsc的方向策略使得机器人在决策下一步移动前随机选择可行范围内的任意方向,避免种群陷入局部最优;tsc的步长策略根据基于目标响应信号的非线性递减步长函数,有效控制机器人每步的步长,使得机器人在移动过程中既不会因步长太大而错过目标也不会因步长过短而增加时耗,因此机器人可以较快地找到目标。并且,tsc可以先行判断转动方向的必要性,既不会错过搜寻目标的最佳方向,也可以减少转角次数。
[0185]
步骤2.6.4、mstc对比结果分析
[0186]
将mode6与mode1整体相比,可以看出搜索效率提高了15.93%-28.31%,转角次数减少了34.51%-61.18%。因为etc可以安全有效地规避复杂非凸障碍物,rdc更有利于开发未知环境,tsc的局部搜索能力比较突出,并且etc、rdc、tsc皆可在决策下一步移动之前先判断当前方向的优劣性,这样既可以避免因转动方向而错过原来的最优方向,还能在一定程度上减少机器人转动角度过程带来的时间损耗、能量损耗及机械磨损等问题。由图10可以明显看出,mode6在提高搜索效率、减少转角次数上优于mode1。因此,本发明的mstc策略相对其他三种策略更有利于群机器人多目标搜索。
[0187]
上述实施案例只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。