技术特征:
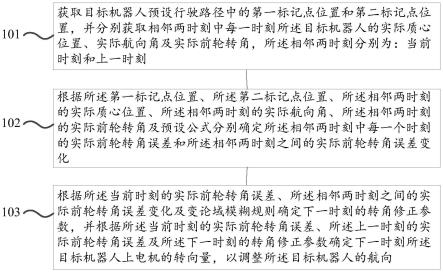
1.一种农用机器人行驶路径控制方法,其特征在于,包括:获取目标机器人预设行驶路径中的第一标记点位置和第二标记点位置,并分别获取相邻两时刻中每一时刻所述目标机器人的实际质心位置、实际航向角及实际前轮转角,所述相邻两时刻分别为:当前时刻和上一时刻;根据所述第一标记点位置、所述第二标记点位置、所述相邻两时刻的实际质心位置、所述相邻两时刻的实际航向角、所述相邻两时刻的实际前轮转角及预设公式分别确定所述相邻两时刻中每一个时刻的实际前轮转角误差和所述相邻两时刻之间的实际前轮转角误差变化;根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化及变论域模糊规则确定下一时刻的转角修正参数,并根据所述当前时刻的实际前轮转角误差、所述上一时刻的实际前轮转角误差及所述下一时刻的转角修正参数确定下一时刻所述目标机器人上电机的转向量,以调整所述目标机器人的航向。2.根据权利要求1所述的农用机器人行驶路径控制方法,其特征在于,所述根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化及变论域模糊规则确定下一时刻的转角修正参数,包括:根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化确定伸缩因子;根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化、所述伸缩因子及所述变论域模糊规则确定所述下一时刻的转角修正参数。3.根据权利要求1或2所述的农用机器人行驶路径控制方法,其特征在于,所述根据所述第一标记点位置、所述第二标记点位置、所述相邻两时刻的实际质心位置、所述相邻两时刻的实际航向角及所述相邻两时刻的实际前轮转角分别确定所述相邻两时刻中每一个时刻的实际前轮转角误差和所述相邻两时刻之间的实际前轮转角误差变化,包括:根据所述第一标记点位置的坐标、所述第二标记点位置的坐标、所述上一时刻的实际质心位置的坐标、所述上一时刻的实际航向角确定所述上一时刻的前轮期望转角,并根据所述上一时刻的前轮期望转角和所述上一时刻的实际前轮转角确定所述上一时刻的实际前轮转角误差;根据所述第一标记点位置的坐标、所述第二标记点位置的坐标、所述当前时刻的实际质心位置的坐标、所述当前时刻的实际航向角确定所述当前时刻的前轮期望转角,并根据所述当前时刻的前轮期望转角和所述当前时刻的实际前轮转角确定所述当前时刻的实际前轮转角误差;根据所述上一时刻的实际前轮转角误差和所述当前时刻的实际前轮转角误差确定所述相邻两时刻之间的实际前轮转角误差变化。4.根据权利要求3所述的农用机器人行驶路径控制方法,其特征在于,根据所述第一标记点位置的坐标、所述第二标记点位置的坐标、某一时刻的实际质心位置的坐标、所述某一时刻的实际航向角及如下公式确定所述某一时刻的前轮期望转角:
d
θ
=(1-λ1)k1e
d
λ1k2e
θ
其中,e
d
为某一时刻的横向偏差,(x1,y1)为第一标记点位置的坐标,(x2,y2)为第二标记点位置的坐标,(x3,y3)为某一时刻的实际质心位置的坐标,e
θ
为某一时刻的航向角偏差,θ为某一时刻的实际航向角,d
θ
为某一时刻的前轮期望转角,λ1为偏差权重,k1为某一时刻的横向偏差增益,k2为某一时刻的航向角偏差增益。5.根据权利要求4所述的农用机器人行驶路径控制方法,其特征在于,根据所述上一时刻的前轮期望转角、所述上一时刻的实际前轮转角及如下公式确定所述上一时刻的实际前轮转角误差:e(t-1)=d
θ
(t-1)-m
θ
(t-1)根据所述当前时刻的前轮期望转角、所述当前时刻的实际前轮转角及如下公式确定所述当前时刻的实际前轮转角误差:e(t)=d
θ
(t)-m
θ
(t)根据所述上一时刻的实际前轮转角误差、所述当前时刻的实际前轮转角误差及如下公式确定所述相邻两时刻之间的实际前轮转角误差变化:ec(t)=e(t)-e(t-1)其中,e(t-1)为上一时刻的实际前轮转角误差,d
θ
(t-1)为上一时刻的前轮期望转角,m
θ
(t-1)为上一时刻的实际前轮转角,e(t)为当前时刻的实际前轮转角误差,d
θ
(t)为当前时刻的前轮期望转角,m
θ
(t)为当前时刻的实际前轮转角,ec(t)为相邻两时刻之间的实际前轮转角误差变化。6.根据权利要求5所述的农用机器人行驶路径控制方法,其特征在于,所述根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化及变论域模糊规则确定下一时刻的转角修正参数,并根据所述当前时刻的实际前轮转角误差、所述上一时刻的实际前轮转角误差及所述下一时刻的转角修正参数确定下一时刻所述目标机器人上电机的转向量,以调整所述目标机器人的航向,包括:分别确定所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化、第一转角参数、第二转角参数及第三转角参数的基本论域;根据所述当前时刻的实际前轮转角误差和所述相邻两时刻之间的实际前轮转角误差变化确定第一伸缩因子和第二伸缩因子;根据所述当前时刻的实际前轮转角误差的基本论域、所述相邻两时刻之间的实际前轮转角误差变化的基本论域、所述第一转角参数的基本论域、所述第二转角参数的基本论域、所述第三转角参数的基本论域、所述第一伸缩因子、所述第二伸缩因子及变论域模糊规则分别确定所述下一时刻的转角修正参数中的第一转角修正参数、第二转角修正参数和第三转角修正参数;
根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化、所述第一转角修正参数、所述第二转角修正参数及所述第三转角修正参数确定下一时刻所述目标机器人上电机的转向量。7.根据权利要求6所述的农用机器人行驶路径控制方法,其特征在于,根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化及如下公式确定所述第一伸缩因子和所述第二伸缩因子:化及如下公式确定所述第一伸缩因子和所述第二伸缩因子:根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化、所述第一转角修正参数、所述第二转角修正参数、所述第三转角修正参数及以下公式确定下一时刻所述目标机器人上电机的转向量:其中,α(e
t
)为第一伸缩因子,λ2为调整权重,0<λ2<1,e为自然常数,k3为调整系数,β(e
ct
)为第二伸缩因子,λ3为调整权重,0<λ3<1,k4为调整系数,u为下一时刻目标机器人上电机的转向量,δk
p
、δk
i
及δk
d
分别为第一转角修正参数、第二转角修正参数、第三转角修正参数。8.一种农用机器人行驶路径控制系统,采用权利要求1至7中任一项所述的方法,其特征在于,所述系统包括:数据采集模块,所述数据采集模块用于获取目标机器人预设行驶路径中的第一标记点位置和第二标记点位置,并分别获取相邻两时刻所述目标机器人的实际质心位置、实际航向角及实际前轮转角,所述相邻两时刻分别为:当前时刻和上一时刻;数据融合模块,所述数据融合模块用于根据所述第一标记点位置、所述第二标记点位置、所述相邻两时刻的实际质心位置、所述相邻两时刻的实际航向角及所述相邻两时刻的实际前轮转角分别确定所述相邻两时刻中每一个时刻的实际前轮转角误差和所述相邻两时刻之间的实际前轮转角误差变化;数据输出模块,所述数据输出模块用于根据所述当前时刻的实际前轮转角误差、所述相邻两时刻之间的实际前轮转角误差变化及变论域模糊规则确定下一时刻的转角修正参数,并根据所述下一时刻的转角修正参数确定下一时刻所述目标机器人上电机的转向量,以调整所述目标机器人的航向。9.一种电子设备,其特征在于,包括:处理器、存储器、总线;其中,所述处理器、所述存储器通过所述总线完成相互间的通信;所述处理器用于调用所述存储器中的程序指令,以执行如权利要求1至7中任一项所述的方法。10.一种计算机可读存储介质,其特征在于,包括:存储的程序;其中,在所述程序运行时控制所述存储介质所在设备执行如权利要求1至7中任一项所述的方法。
技术总结
本申请提供一种农用机器人行驶路径控制方法及系统。包括:获取目标机器人预设行驶路径中的第一标记点位置和第二标记点位置,分别获取相邻两时刻中每一时刻目标机器人的实际质心位置、实际航向角及实际前轮转角;根据第一标记点位置、第二标记点位置、相邻两时刻的实际质心位置、相邻两时刻的实际航向角、相邻两时刻的实际前轮转角及预设公式分别确定相邻两时刻中每一时刻的实际前轮转角误差和相邻两时刻之间的实际前轮转角误差变化;根据当前时刻的实际前轮转角误差、相邻两时刻之间的实际前轮转角误差变化及变论域模糊规则确定下一时刻的转角修正参数,根据相邻两时刻的实际前轮转角误差、转角修正参数确定下一时刻目标机器人上电机的转向量。标机器人上电机的转向量。标机器人上电机的转向量。
技术研发人员:温浩军 汪光岩 马晓东 周倩倩
受保护的技术使用者:石河子大学
技术研发日:2022.08.19
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。