1.本发明涉及一种采煤机端头采高显示装置的角度调节系统和角度自动调节方法。
背景技术:
2.采煤机是煤矿井下综采工作面重要的割煤设备,当采煤机割煤时,工作面会产生大量煤尘,且采煤工作面光线较暗,不利于采煤机司机观察滚筒的截割高度,进而无法判断顶底板是否割到合适的位置。采煤机端头采高显示装置可以为采煤机司机实时提供采高数据,方便煤机司机参考该数据调整滚筒高度,减少其观察滚筒的次数,降低其劳动强度。
3.现有采煤机端头采高显示装置是固定安装在采煤机行走部上方或者摇臂上的合适位置,该方式简单易实现,但角度不能调节,采煤机司机只有身处某个固定区域时才能观察到采高数据。
技术实现要素:
4.本发明的目的是提供一种采煤机端头采高显示装置角度自动调节系统及方法,能自动调节显示装置的角度,扩展采煤机司机观察滚筒采高数据的位置范围。
5.本发明的主要技术方案有:
6.一种采煤机端头采高显示装置角度自动调节系统,包括安装架、显示装置、遥控器、天线、采煤机控制模块、电机和电机驱动模块,电机和电机驱动模块电气连接,显示装置铰接在安装架上,铰接轴线竖直延伸,所述显示装置与所述电机的输出轴固定连接,所述显示装置能够在所述电机的带动下绕铰接轴线左右转动,显示装置、天线、电机驱动模块均与采煤机控制模块电气连接,所述遥控器通过所述天线与所述采煤机控制模块进行无线遥控信号交互。
7.所述显示装置的顶面和底面上分别连接有上铰接轴和下铰接轴,上铰接轴和下铰接轴分别向上和向下安装在所述安装架的上部和下部。
8.所述安装架的上部和下部可以分别为实体结构和空腔结构,上铰接轴向上穿过安装架的上部,且上铰接轴的上端设有轴向限位端头,所述电机设置在安装架的下部空腔内,下铰接轴的下端穿过安装架的下部的顶板,并与所述电机的输出轴同轴固定连接。
9.所述采煤机端头采高显示装置角度自动调节系统还包括采高传感器,所述采高传感器的信号输出端接入采煤机控制模块。
10.所述采煤机端头采高显示装置角度自动调节系统还包括采煤机箱体,所述安装架固定安装在采煤机箱体前侧外壁上。
11.所述天线优选安装在采煤机箱体前侧外壁上且处于采煤机箱体前侧中部位置。
12.一种采煤机端头采高显示装置角度自动调节方法,在采煤机箱体前侧外壁上固定安装天线和一个安装架,将显示装置铰接在所述安装架上,铰接轴线竖直延伸,使用电机带动显示装置绕铰接轴线左右旋转,所述电机为步进电机或伺服电机,使用遥控器通过所述天线与采煤机控制模块进行无线遥控信号交互,所述遥控器有左右两个,左侧遥控器与采
煤机控制模块之间进行通信时,采煤机控制模块控制显示装置向左旋转,右侧遥控器与采煤机控制模块之间进行通信时,采煤机控制模块控制显示装置向右旋转,当采煤机控制模块通过天线接收遥控器的遥控信号时,采煤机控制模块进行遥控信号接收延时计算并通过信号标识判断所述遥控器是左、右哪个遥控器,进而判断所述遥控器相对显示装置的左右方向,以及实时记录遥控信号接收延时、遥控器所在方向、电机驱动脉冲信号的脉冲数以及显示装置的当前角度,然后给电机驱动模块发送驱动信号,电机驱动模块向电机输出电机驱动脉冲信号,使电机带动显示装置向遥控器所在方向旋转,旋转角度的大小与遥控信号接收延时成正比,当遥控信号接收延时大于预设的延时上限值或显示装置的角度达到预设的角度上限值时,电机停止转动。
13.显示装置向左、右方向的旋转角度分别记为负值和正值,同时将显示装置的显示屏平行于采煤机箱体前侧外壁且朝向采空侧时的角度作为0
°
,显示屏偏向0
°
位置的左侧和右侧时显示装置的角度分别记为负值和正值,当采煤机的截割电机和牵引电机断电后以及采煤机上电后,若显示装置的角度不是0
°
初始位置,则采煤机控制模块对显示装置的当前角度取绝对值,计算该绝对值角度对应的电机驱动信号的脉冲数,并根据显示装置的当前角度确定显示装置的复位旋转方向,然后采煤机控制模块发送驱动信号给电机驱动模块,驱使电机转动并带动显示装置复位,即旋转到0
°
初始位置。
14.当遥控器与天线的距离沿同一方向由远变近或由近变远时,采煤机控制模块实时检测遥控信号接收延时,当连续相邻两次同一方向的遥控信号接收延时大小发生变化,且其间仅有该方向的遥控器发送遥控信号,将根据这两次遥控信号接收延时的差值调整显示装置的角度,具体调整方法为:延时数值增大则向该方向继续旋转延时的差值的绝对值对应的角度,延时数值减小则向相反方向旋转延时的差值的绝对值对应的角度。
15.本发明的有益效果是:
16.本发明无需人为旋转显示装置调节角度,自动化程度高,旋转精度可调节,扩展了采煤机司机观察滚筒采高数据的位置范围。
17.本发明通过自动且灵活地调整显示装置与采煤机司机的相对角度,让采煤机司机能多方位观察到清晰的采高数据,不仅有效降低了采煤机司机的劳动强度,增强采煤工作面的生产安全性,还显著提升了采煤机的自动化水平。
附图说明
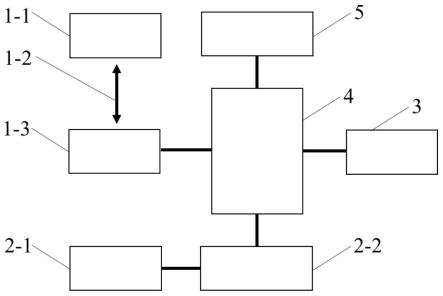
18.图1为本发明的采煤机端头采高显示装置角度自动调节系统的电气连接关系示意图;
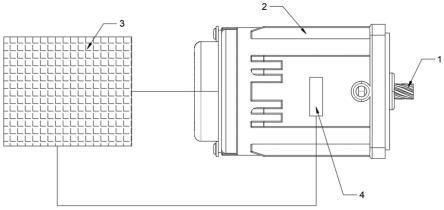
19.图2为本发明的采煤机端头采高显示装置角度自动调节系统的一个实施例的主视图(显示屏朝前);
20.图3为图2的右视图;
21.图4为图2所示实施例中显示装置向右旋转90度的状态图(显示屏朝右)。
22.附图标记:
23.1-1.遥控器;1-2.遥控信号;1-3.天线;2-1.电机;2-2.电机驱动模块;2-3.下铰接轴;3.显示装置;4.采煤机控制模块;5.采高传感器;6.安装架;6-1.上铰接轴;7.采煤机箱体。
具体实施方式
24.如图1-4所示,本发明公开了一种采煤机端头采高显示装置角度自动调节系统,包括安装架6、采煤机端头采高显示装置(简称为显示装置)3、遥控器1-1、天线1-3、采煤机控制模块4、电机2-1和电机驱动模块2-2,电机和电机驱动模块电气连接,显示装置铰接在安装架上,铰接轴线竖直延伸。所述显示装置与所述电机的输出轴固定连接,所述显示装置能够在所述电机的带动下绕铰接轴线左右转动。电机驱动模块驱动电机工作,电机带动显示装置向左或向右旋转。显示装置、天线、电机驱动模块均与采煤机控制模块电气连接,所述遥控器通过所述天线与所述采煤机控制模块进行无线遥控信号交互。所述显示装置和电机驱动模块均与所述采煤机控制模块双向通信连接。采煤机控制模块是采煤机电控系统的核心,其作为所述采煤机端头采高显示装置角度自动调节系统的电气控制中心,掌控各电气节点的状态。显示装置上显示的采高数据来自采煤机控制模块。采煤机控制模块通过电机驱动模块控制电机的启停。遥控器可用于对采煤机的行进速度、方向以及滚筒高度等进行调整。
25.所述显示装置的顶面和底面上分别连接有上铰接轴6-1和下铰接轴2-3,上铰接轴和下铰接轴分别向上和向下安装在所述安装架的上部和下部。附图所示实施例中,安装架的上部和下部均为由后向前延伸的悬臂结构,连同安装架的后部形成一个左右贯通、开口朝前的凹槽,所述显示装置位于该凹槽内。
26.所述安装架的上部和下部可分别为实体结构和空腔结构,上铰接轴向上穿过安装架的上部,且上铰接轴的上端设有轴向限位端头。上铰接轴可相对安装架自由转动。所述电机设置在安装架的下部空腔内,下铰接轴的下端穿过安装架的下部的顶板,并与所述电机的输出轴同轴固定连接,下铰接轴可相对安装架自由转动,电机转动时经下铰接轴带动显示装置同步转动。
27.所述采煤机端头采高显示装置角度自动调节系统还包括采高传感器5,所述采高传感器的信号输出端接入采煤机控制模块,采煤机控制模块接收采高传感器检测到的采高数据,再将其送至显示装置进行显示。所述采高传感器是专门针对采煤机端头采高显示装置的显示需求设置的传感器。
28.所述采煤机端头采高显示装置角度自动调节系统还包括采煤机箱体7,所述安装架固定安装在采煤机箱体前侧(即带有采煤机操作按钮侧)外壁上。
29.所述天线优选安装在采煤机箱体的采煤机箱体前侧外壁上且处于采煤机箱体前侧中部位置。
30.通常遥控器由采煤机司机手持,用于根据工作面割煤情况对采煤机的行进速度、方向以及滚筒高度等进行实时调整。当采煤机司机操作遥控器时,采煤机控制模块通过天线接收遥控信号1-2,采煤机控制模块根据遥控信号进行采煤机动作调整,并给电机驱动模块发送驱动信号,使电机带动显示装置向遥控器所在方向旋转,以便采煤机司机能更好地观察显示装置上的内容。至于旋转的角度,可以由采煤机控制模块或者其与其他传感器配合另外测算遥控器相对显示装置的方位来确定。
31.由于所述采煤机端头采高显示装置角度自动调节系统可以自动控制显示装置向遥控器也就是采煤机司机的方向旋转,在无需自己操作的情况下就能满足观察滚筒采高数据的需求,因此不仅增强了采煤工作面的生产安全性,更是显著降低了采煤机司机的劳动
强度。
32.本发明还公开了一种采煤机端头采高显示装置角度自动调节方法,如图1-4所示,具体是在采煤机箱体7前侧(带有采煤机操作按钮侧)外壁上固定安装天线1-3和一个安装架6,将采煤机端头采高显示装置(简称显示装置)1铰接在所述安装架上,保持铰接轴线竖直延伸,使用电机2-1带动采煤机端头采高显示装置绕铰接轴线左右旋转。所述电机为步进电机或伺服电机。使用遥控器1-1通过所述天线与采煤机控制模块4进行无线遥控信号交互。所述遥控器有左右两个,由两个采煤机司机分别持有,一个采煤机司机在左侧,一个采煤机司机在右侧。左侧遥控器与采煤机控制模块之间进行通信时,采煤机控制模块控制显示装置向左旋转,右侧遥控器与采煤机控制模块之间进行通信时,采煤机控制模块控制显示装置向右旋转。
33.通常遥控器用于远程操作采煤机,对采煤机的行进速度、方向以及滚筒高度等进行调整。当采煤机控制模块通过天线接收到任意一个遥控器的遥控信号时,即表示此时相应侧采煤机司机有观察采高数据的需要。
34.当采煤机控制模块通过天线接收遥控器的遥控信号1-2时,采煤机控制模块进行遥控信号接收延时计算并通过信号标识判断所述遥控器是左、右哪个遥控器,进而判断所述遥控器相对显示装置的左右方向,以及实时记录遥控信号接收延时、遥控器所在方向(即遥控器相对显示装置的左右方向)、电机驱动脉冲信号的脉冲数以及显示装置的当前角度,然后给电机驱动模块2-2发送驱动信号,电机驱动模块向电机输出电机驱动脉冲信号,使电机带动显示装置向遥控器所在方向旋转,常规范围内旋转角度的大小、驱动脉冲信号的脉冲数与遥控信号接收延时三者成正比。遥控信号接收延时越长,表示遥控器或采煤机司机距离天线越远,需要带动显示装置旋转更大的角度。
35.由于实际采煤机司机在天线左右两边最大角度一般小于90度,因此将显示装置调整到90度已经能够满足现场的实际需求,因此并不会无限制地调节显示装置的角度。为此可以预设一些上限值用以限制显示装置的角度最大值,例如预设延时上限值或角度上限值(角度上限值的典型值为
±
90度),当遥控信号接收延时大于预设的延时上限值或显示装置的角度达到预设的角度上限值时,电机停止转动。
36.当采煤机控制模块接收到相反方向遥控器信号时,将给电机驱动模块发送驱动信号,电机驱动模块再向电机输出电机驱动脉冲信号,使电机带动显示装置向遥控器所在方向(即相反方向)旋转。
37.每单位的遥控信号接收延时(例如1秒延时、1毫秒延时)与电机或显示装置的旋转角度的关系可以用比例系数n(n>0)表示,n的值可以根据实际情况调整。当比例关系确定后,遥控信号接收延时与旋转角度线性相关,二者一一对应。
38.显示装置向左、右方向的旋转角度分别记为负值和正值,同时将显示装置的显示屏平行于采煤机箱体前侧外壁且朝向采空侧时的角度作为0
°
,显示屏偏向0
°
位置的左侧和右侧时显示装置的角度分别记为负值和正值,显示装置的角度的取值范围是-180
°
至 180
°
。
39.显示装置向左旋转时,用显示装置的当前角度值减去输出的电机驱动脉冲信号的脉冲数所对应的角度值可以得到向左旋转后的角度值。显示装置向右旋转时,用显示装置的当前角度值加上输出的电机驱动脉冲信号的脉冲数所对应的角度值可以得到向右旋转
后的角度值。
40.当采煤机的截割电机和牵引电机断电后以及采煤机上电后,若显示装置的角度不是0
°
初始位置,则采煤机控制模块对显示装置的当前角度取绝对值,计算该绝对值角度对应的电机驱动信号的脉冲数(该脉冲数即为显示装置复位需要旋转的角度所对应的脉冲数),并根据显示装置的当前角度确定显示装置的复位旋转方向(即与当前角度对应的方向相反),然后采煤机控制模块发送驱动信号给电机驱动模块,电机驱动模块再输出电机驱动脉冲信号给电机,驱使电机转动并带动显示装置复位,即旋转到0
°
初始位置。
41.当遥控器与天线的距离沿同一方向由远变近或由近变远时,采煤机控制模块实时检测遥控信号接收延时,当连续相邻两次同一方向的遥控信号接收延时大小发生变化,且其间仅有该方向的遥控器发送遥控信号,将根据这两次遥控信号接收延时的差值调整显示装置的角度,具体调整方法为:延时数值增大则向该方向继续旋转延时的差值的绝对值对应的角度,延时数值减小则向相反方向旋转延时的差值的绝对值对应的角度。该方法相当于对显示装置的角度进行微调,使显示装置的角度的自动调节结果更好地契合实际情况需要。
42.本发明的采煤机端头采高显示装置角度自动调节系统可用于实现所述采煤机端头采高显示装置角度自动调节方法,所述系统及方法可以扩展采煤机司机观察滚筒采高数据的位置范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。