1.本发明属于高光谱图像处理技术领域,特别涉及一种高光谱图像分类方法及系统
背景技术:
2.高光谱遥感影像是一个光谱与图像相结合的立方体三维数据,具有“图谱合一”的特点,被广泛应用于植被分类、精细化农业、环境监测和矿物填图等相关领域。在图像分析任务中,分类是高光谱技术应用领域中非常重要的研究内容。由于高光谱数据的高维、高非线性和"小样本问题",高光谱分类任务仍然面临着巨大的挑战。
3.早期的高光谱图像分类通常只利用了地物的光谱特征,没有深入挖掘图像内部的上下文信息。对于光谱特征的提取主要有基于特征变换和波段选择的方法。常用的特征变换方法有主成分分析,独立主成分分析,线性判别分析等方法,这类方法简单快速,可以有效地保留原始高维数据的大部分信息,但在映射的过程中会改变波段原有的物理意义;基于特征选择的光谱特征提取是从数据的原始波段中选择出相似度低、信息量大的子集,用该子集表示原始波段,可以在不改变原有物理意义的前提下保留更有用的信息。常用的测量方式有:基于信息量的信息熵与联合熵、最佳指数法等;基于相似度的信息散度(id)、欧氏距离(ed)和余弦距离等。仅利用高光谱图像的光谱信息进行分类,容易造成地物空间上的不连续,产生“椒盐”现象,使分类结果达不到理想的效果。
4.后来,研究人员通过引入空间信息来改善高光谱分类的结果。例如,灰度共生矩阵(glcm),局部二值模式(lbp),形态学(mp)等方法。此外,gabor滤波,小波变换,双边滤波器(bf)也应用于高光谱图像分类,用以提取高光谱图像的纹理特征。2014年,pablo等人提出一种基于小波变换和mp相结合的空谱联合特征提取方法。2015年dalla等人将独立主成分分析(ica)和扩展形态学相结合得到空谱联合特征。2018年,jia等人提出了3-d gabor表面特征融合方法,同时得到了光谱信息和空间信息,有效地提高了分类精度。以上的空谱联合特征提取方式虽然得到了高光谱影像的空谱特征,但都存在分类精度较低,空谱特征提取效果不好,计算量大,耗费时间长的问题。
5.空谱联合特征成为高光谱数据特征提取的趋势,在提高分类精度的同时也为分类问题带来了新的机遇和挑战,选择更有效的空谱联合特征提取方式成为了分类问题研究的热点。
技术实现要素:
6.本发明的目的在于提供一种高光谱图像分类方法及系统,以解决现有的高光谱图像特征提取技术没有进行空谱联合特征提取或空谱特征提取效果不好,计算量大,耗费时间长的问题。
7.为实现上述目的,本发明采用以下技术方案:
8.一种高光谱图像分类方法,包括以下步骤:
9.对高光谱数据进行归一化处理,将归一化后高光谱图像的光谱维均分为n个子空
间;
10.将每个子空间内的单波段图像拉伸为一维向量,构造相邻子空间中波段间相似性矩阵,使用信息散度进行波段间的相似性测量,对均分后的子空间按照聚类方式自适应划分为n个数量的子空间,使得每个子空间包含不同数量的波段;
11.求取每个子空间光谱维的平均值,将每个子空间的光谱平均值叠加后作为光谱特征输出;
12.利用多尺度相对总变分方法对光谱特征输出的特征提取多尺度空间特征;
13.对提取多尺度空间特征使用核主成分分析进行降维处理,得到最终的空谱联合特征;
14.选取5%的indian pines数据和1%的university of pavia数据作为训练集,剩余样本作为测试集;
15.利用带有rbf核的支持向量机模型对测试集进行分类,对分类结果进行分类精度评价。
16.进一步的,对高光谱数据进行归一化处理之前,将原始数据进行标准化处理,使得数据被规范在[0,1]之间,运算过程如下:
[0017][0018]
假设高光谱数据为l,波段的总数为i;初次分割时,将原始立方体数据l等分为n个子立方体,计算过程如下:
[0019][0020]
l
→
{l1,l2,
…
,ln}
ꢀꢀ
(3)
[0021]
此时,li(i≤n)为划分后的子空间,每个子空间含有相同数量的波段z。
[0022]
进一步的,构造相邻子空间中波段间相似性矩阵,具体为:
[0023]
相邻的两个子空间li和l
i 1
(i 1≤n)之间波段的相似性,将波段拉伸为一维向量后构造相似性矩阵,相似性的测量使用信息散度,对这两个相邻子空间的划分点按照聚类的方式重新进行划分;
[0024]
信息散度:假设数据一共有n个波段,随机选取两个波段x和y,用一维向量表示为x=(x1,x2,
…
,xn)和y=(y1,y2,
…
,yn),这两个波段之间的信息散度d
id
(x,y)定义为公式(4)-(6);
[0025]did
(x,y)=d(x‖y) d(y‖x)
ꢀꢀ
(4)
[0026][0027][0028]
其中,和分别表示xi和yi(i《n)概率,d(y‖x)和d(x‖y)分别是y相对于x和x相对于y的信息散度测量;当散度值越大,表明两个波段的相似度越低,若两个波段完全相同其信息散度值为0;
[0029]
子空间聚类是最大化类间距离和最小化类内距离,划分目标函数的一般形式表示如下:
[0030]
argmin(d
intra-d
inter
)
ꢀꢀ
(7)
[0031]
其中d
inter
是相邻两个子空间的类间距离,用两个子空间中最大的信息散度值表示,定义如下:
[0032]dinter
=max|d
id
(m,n)|
ꢀꢀ
(8)
[0033]did
(m,n)表示波段m和波段n之间的信息散度值,假设m是第i(i≤n)个子空间中的波段,则n是第i 1个子空间中的波段;
[0034]dintra
是类内距离,用两个相邻子空间的信息散度平均值之和表示,定义如下:
[0035]dintra
=mi m
i 1
ꢀꢀ
(9)
[0036][0037][0038]did
(p,q)为第p和第q个波段之间的信息散度值,第p和第q个波段属于同一个子空间;假设mi为第i个子立方体信息散度总和的平均值,则m
i 1
为第i 1个子立方体信息散度总和的平均值,t为第i个子立方体中包含的频带总数;经过目标函数(7)再次划分后的子空间可以表示为:
[0039]
b={b1,b2,b3…
,bn}
ꢀꢀ
(12)
[0040]
其中b表示聚类算法的输出,bi(i《n)表示聚类算法后新的子空间。
[0041]
进一步的,求取每个子空间的光谱平均值,用这个平均值代表这个子空间作为输出,表示如式(13):
[0042][0043]
是对子空间bi(i《n)求光谱平均值的结果,输出n个子空间的平均光谱值并进行叠加,得到波段数为n的光谱特征;avgb是每个子立方体光谱平均值叠加后的结果。
[0044]
进一步的,利用rtv技术提取图像的空间特征,rtv的定义如下:
[0045][0046]
λ为权重即惩罚参数,用来控制图像平滑度;像素点p处的rtv定义如式(15);
[0047][0048]
其中,ε是一个非零常数,目的是避免公式(15)中分母为零,d
x
和dy分别为x和y方向上的窗口全变分,l
x
和ly分别为x和y方向上的窗口固有变分,d取决于邻域内像素梯度值的绝对大小,而l不仅取决于梯度值的绝对大小,还取决于梯度的方向,定义如式(16)-(19);
[0049][0050]
[0051][0052][0053]
其中,q是像素p矩形邻域内的像素点,和分别表示图像s在x和y方向上的偏导数;g
p,q
是二者距离的高斯权值,计算方式如公式(20);
[0054][0055]
其中,σ是高斯标准差,控制邻域的尺度大小;x
p-xq表示二者在x方向上的距离差,y
p-yq表示y方向上的距离差。
[0056]
在rtv的基础之上,设置不同的参数,对同一数据多次提取结构特征,将得到的特征子集按光谱维堆叠,从而可以满足不同物质的结构特征提取的需要,形成mrtv空间特征提取框架,具体表示如式(21)和(22)
[0057]fi
=rtv(i,λi,σi)(i≤c)
ꢀꢀ
(21)
[0058]
f={f1,f2,f3…
fc}
ꢀꢀ
(22)
[0059]
其中,i为原始数据,假设i的波段数为m,对i进行c次不同参数设置下的rtv计算,可以得到c个波段数为m的特征子集{f1,f2,f3…
fc};λi控制图像的平滑度,其值越大,图像越模糊,反之图像更加清晰;σi为控制邻域大小;fi为第i个特征子集,波段数为m;f表示c个特征子集按光谱维堆叠后的立方体数据,波段数为m
×
c。
[0060]
进一步的,对多尺度结构特征进行kpca降维处理,kpca的定义如下:
[0061]
假设原始数据空间为rd,原始数据为s={x1,x2,...,xm}∈rd,共有m个样本,为低维空间到高维空间的映射函数,且映射后的数据均值为0,得到公式(23);
[0062][0063]
由此得到映射数据的协方差矩阵c为公式(24);
[0064][0065]
若矩阵c的特征向量矩阵为v,特征值为λ,则可以得到公式(25);
[0066]
λv=cv
ꢀꢀ
(25)
[0067]
设xi和xj为任意两个样本点,定义大小为m
×
m的矩阵k
ij
,如公式(26);
[0068][0069]
对特征向量矩阵v的第k个特征矢量vk进行归一化处理得到(27);
[0070]vkvk
=1
ꢀꢀ
(27)
[0071]
则得出原始空间中的任一样本x的映射函数在vk的投影为(28);
[0072][0073]
为线性表出系数;对映射数据中心化,用来代替k如公式(29);
[0074][0075]
其中im是一个m
×
m矩阵;则样本数据的第k维表示为公式(30);
[0076][0077]
kpca利用rbf核函数对非线性不可分数据进行映射,如式(31)所示,n为特征融合后波段数量,p为最终特征输出;
[0078]
p=kpca(f,n)
ꢀꢀ
(31)。
[0079]
进一步的,根据设定的训练样本比例随机选择训练样本,设训练样本有n个,每个样本的维度为d,则训练样本集可以表示为测试集样本有m个表示为:划分训练集和测试集,样本总数为(m n)。
[0080]
进一步的,使用svm对两个高光谱数据集进行分类,并且将svm的惩罚参数c和核参数σ设置为24.5。
[0081]
进一步的,分类性能评价指标采用总体分类精度、平均分类精度和kappa系数。
[0082]
进一步的,一种高光谱图像分类系统,包括:
[0083]
预处理模块,用于对高光谱数据进行归一化处理,将归一化后高光谱图像的光谱维均分为n个子空间;
[0084]
构造矩阵模块,用于将每个子空间内的单波段图像拉伸为一维向量,构造相邻子空间中波段间相似性矩阵,使用信息散度进行波段间的相似性测量,对均分后的子空间按照聚类方式自适应划分为n个数量的子空间,使得每个子空间包含不同数量的波段;
[0085]
特征输出模块,用于求取每个子空间光谱维的平均值,将每个子空间的光谱平均值叠加后作为光谱特征输出;
[0086]
特征提取模块,用于利用多尺度相对总变分方法对光谱特征输出的特征提取多尺度空间特征;
[0087]
降维处理模块,用于对提取多尺度空间特征使用核主成分分析进行降维处理,得到最终的空谱联合特征;
[0088]
测试集分类模块,用于选取5%的indian pines数据和1%的university of pavia数据作为训练集,剩余样本作为测试集;利用带有rbf核的支持向量机模型对测试集进行分类,对分类结果进行分类精度评价。
[0089]
与现有技术相比,本发明有以下技术效果:
[0090]
本发明根据高光谱数据既有光谱维又有空间维的特点,本文提取其空谱联合特征。(1)利用信息散度度量波段间相似性并基于聚类的思想划分子空间,最后将子空间的光谱平均值叠加后作为光谱特征输出;(2)使用不同参数设置下的相对全变分技术提取多尺度空间特征;(3)利用核主成分分析对数据进行降维,得到最终的空谱联合特征。(4)使用带有rbf核的svm模型对空谱联合特征进行分类,并在两个高光谱数据集上证明该算法提高了分类精度。
[0091]
为了减少信息的冗余,本发明利用信息散度值判断波段之间的相似性,通过聚类的思想划分自适应子空间,实现光谱特征的提取。由于纹理细节中可能包含噪声,提出对图像提取结构特征作为空间特征,利用不同参数设置下的相对全变分技术实现多尺度空间特
征的提取并用核主成分分析进行降维,最终得到空谱联合特征,通过和常用的特征提取方法相比较,该模型能够获得更好的精度。
附图说明
[0092]
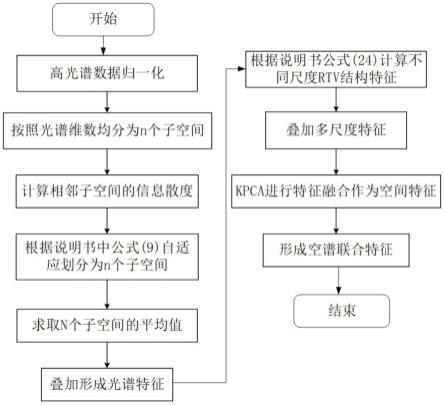
图1是基于空谱联合特征的高光谱特征提取流程图。
[0093]
图2是基于自适应子空间划分的光谱特征提取结构图。
[0094]
图3是基于多尺度相对全变分的空间特征提取结构图。
[0095]
图4是indian pines影像。
[0096]
图5是university of pavia影像。
[0097]
图6是不同特征提取方式对indian pines数据的分类图,其中(a)地面真实图(b)svm(c)asps(ed)(d)asps(id)(e)asps-lbp(f)asps-glcm(g)asps-bf(h)asps-mrtv。
[0098]
图7是不同特征提取方式对university of pavia数据的分类图,其中(a)地面真实图(b)svm(c)asps(ed)(d)asps(id)(e)asps-lbp(f)asps-glcm(g)asps-bf(h)asps-mrtv。
具体实施方式
[0099]
下面结合附图和实施例详细说明本发明的实施方式。
[0100]
本发明是一种基于波段聚类和多尺度结构特征融合的高光谱图像分类方法,首先对高光谱图像进行归一化,针对高光谱数据同时具有光谱维和空间维的特点,提出了一种空谱联合特征提取方式,计算波段之间的信息散度值,并利用聚类的思想形成自适应子空间划分,用每个子立方体的平均值代替该立方体,起到光谱特征提取作用。对于空间信息,通过计算不同尺度下的相对全变分,提取数据的多尺度结构空间特征,利用核主成分分析进行降维,最终形成空谱联合特征。为了验证特征提取框架的有效性,使用带有rbf核的svm模型对空谱联合特征进行分类,并在两个高光谱数据集上证明该算法提高了分类精度。
[0101]
如图1所示,本发明具体包括如下步骤:
[0102]
首先,对高光谱遥感影像数据进行归一化,对于光谱信息的提取,构建了基于自适应子空间划分策略(adaptive subspace partitioning strategy,asps)光谱特征提取结构图。如图2所示。具体如下:首先,将高光谱数据按照光谱维数均分为n个子空间,然后计算相邻子空间的信息散度,并对子空间按照聚类的方式重新进行划分,以此来得到自适应划分后的子空间,最后,求取n个子空间的平均值进行叠加形成光谱特征。对于空间信息的提取,构建了基于多尺度相对全变分(multi-scale rtv,mrtv)的空间特征提取结构图。如图3所示,通过计算不同尺度下的相对全变分,提取数据的多尺度结构空间特征,然后对其进行kpca降维处理,最终形成空谱联合特征。
[0103]
本发明的一个更具体的实施例如下:
[0104]
1.硬件平台
[0105]
本次空谱联合特征提取实验基于windows10和matlab2019a的实验环境,处理器为inter core i7-8750,gpu为nvidia geforce gtx1050ti,内存为16gb。
[0106]
2.实验数据
[0107]
2.1 indian pines数据集
[0108]
indian pines数据(简称为ip)的真实场景源于印第安纳州西北部的一片实验区域,由机载可见光成像光谱仪aviris采集而得到。该数据大小为145
×
145
×
220像素,具有20m的空间分辨率,光谱范围为0.2μm~2.4μm。去除20个覆盖水吸收区域的谱带对实验的影响,共有200个波段。该影像共包含16种真实地物,伪色彩图、地面真实图及地物类型如图4所示,真实地物数量分布如表1所示。
[0109]
表1 ip数据集地物类别及样本划分
[0110][0111][0112]
2.2 university of pavia数据集
[0113]
university of pavia数据(简称为up)是由成像光谱仪rosis-3对意大利的帕威亚大学部分场景拍摄而得的。该影像的空间分辨率达到了1.3m,波长范围为0.43-0.86um。影像大小为610
×
340
×
115,去除12个覆盖水吸收区域的谱带对实验的影响,共保留了103个波段,包含9类地物。伪色彩图、地面真实图及地物类型如图5所示,真实地物数量分布如表2所示。
[0114]
表2 up数据集地物类别及样本划分
[0115][0116][0117]
3.评价指标
[0118]
(1)混淆矩阵(confusion matrixa)
[0119]
混淆矩阵是n*n的方阵,其中n代表类别的数量,一般定义为以下形式:
[0120][0121]
式中m
ij
表示第i类的样本被错分到第j类中去的样本数目。
[0122]
(2)总体精度(overall accuracy,oa)
[0123]
假设图像类别为c,计算公式如下:
[0124][0125]
其中n代表测试样本的总数,m
ii
表示混淆矩阵中第i行第i列值。oa表示分类结果与参考分类结果相一致的概率。oa越大,表明分类效果越好。
[0126]
(3)平均分类精度(average accuracy,aa)
[0127]
平均分类精度表示各个类别被正确分类的百分比的均值。aa越大,表明分类效果越好,其计算公式如下:
[0128][0129]
(4)kappa系数
[0130]
kappa系数测量了分类结果的不确定性,计算基于混淆矩阵m。kappa系数越大,表明分类效果越好,其公式如下:
[0131][0132]
4.实验结果及评估
[0133]
4.1实验设置
[0134]
实验过程中,我们分别从ip数据和up数据中随机选择5%和1%的数据作为训练样本,剩余样本作为测试样本。为了验证特征提取框架的有效性,在对比实验中统一使用带有rbf核的svm进行分类,并且将svm的惩罚参数c和核参数σ设置为24.5,分类性能评价指标采用oa,aa和kappa系数。表3中展示了本实验中所涉及的参数及代表的的含义。
[0135]
表3各参数及其含义
[0136][0137]
4.2参数优化
[0138]
在空间特征提取过程中,λ和σ是决定rtv效果的两个关键参数,λ的取值范围通常在[0,0.05]之间,而σ的取值范围通常在[1,3],并且为整数。为了提取到更多种类物质的结构特征,本文选取了5个尺度的λ,λ1=0.003,λ2=0.015,λ3=0.01,λ4=0.02,λ5=0.05,使它
们尽可能包括大尺度和小尺度,σ的调优过程使用控制变量法,固定其余σ,得到分类性能最佳的σ1。用同样的方法,对其余σ进行优化。最初,统一设置k=n=30,σ
1-σ5都被简单地设置为1。ip数据的σ实验得到的结果如表4,最优精度加粗表示。
[0139]
表4σ在ip上的寻优过程
[0140]
σ112311111111σ211123111111σ311111231111σ411111112322σ511111111123oa(%)96.5996.5096.5396.3396.3696.4996.4696.6796.0896.7396.76kappa(%)96.0995.9896.0295.7895.8295.9795.9496.1995.5096.2596.28aa(%)84.9984.6385.6184.1783.9184.1884.0385.1183.8285.2985.66
[0141]
在确定λ和σ后对参数k进行优化。k的初始值设置为30,由于ip数据共有200个波段,所以对ip数据k设置的实验范围为[10,100],结果如表5所示,最优结果加粗表示。
[0142]
表5参数k对ip分类精度的影响
[0143]
n102030405060708090100oa(%)95.4196.0096.7696.5295.5996.0095.0895.2394.7293.98kappa(%)94.8995.0796.2895.9394.9395.4094.3594.5193.9393.22aa(%)83.3384.3185.1684.0183.3483.6182.5582.5881.7381.11time(s)127.3129.5130.9132.4134.3135.4135.9137.0137.7139.8
[0144]
ip数据中n的实验范围为[10,100],n在ip数据上实验结果如表6所示,最优结果加粗表示。
[0145]
表6参数n对ip分类精度的影响
[0146]
n102030405060708090100oa(%)96.9897.0696.7696.0195.2693.893.2392.0291.4289.98kappa(%)96.5596.6496.2895.4194.3292.8692.1690.7590.0587.9aa(%)88.0585.9585.1683.882.3880.6879.3876.8975.7573.23time(s)132.1132.4134.4133.9134.7136.1135.9137.1137.8138.7
[0147]
由表4可以看出,对于ip数据来说,当σ1=1,σ2=1,σ3=1,σ4=2,σ5=3时分类精度最高,oa可以达到96.76%,此时kappa可以达到96.28,aa为85.66%。从表5可以看出分类精度随着k的不断上升呈现出先上升后下降的趋势,说明当k比较小时,随着k的增大所提取到的有效信息增加,精度增大,当k过大时信息产生了冗余,分类精度下降,时间随着k的增加而不断上升。当k=30时分类精度最好,此时oa可以达到96.76%,kappa可以达到96.28%,aa的分类精度可以达到85.16%。从表6可以看出,分类精度随着n的增加也呈现先上升后下降的趋势,当n设置为20时,oa最高可以达到97.06%,kappa最高可以达到96.64%,但当n=10时,aa最高可以达到88.02%,但实验中以oa的效果为准。综上所述,对于ip数据,本文设置λ1=0.003,λ2=0.015,λ3=0.01,λ4=0.02,λ5=0.05,σ1=1,σ2=1,σ3=1,σ4=2,σ5=3,k=30,n=20。
[0148]
up数据对σ进行实验得到的结果如表7。up数据共有103个波段,所以k的实验范围
为[10,60],结果如表8所示。对于up数据n的实验范围为[10,60],结果如表9所示,最优结果加粗表示。
[0149]
表7 rtv中参数σ在up上的寻优过程
[0150]
σ112322222222σ211123111111σ311111232222σ411111112322σ511111111123oa(%)98.7698.8698.7798.8398.7698.8698.7798.9098.8998.8798.85kappa(%)98.3598.4898.3698.4598.3498.4998.3698.5498.5398.5195.48aa(%)88.3888.4488.1888.3488.3688.5088.3188.6188.5188.4688.37
[0151]
表8参数k对up分类精度的影响
[0152]
k102030405060oa(%)98.8498.8598.8298.7198.2097.90kappa(%)98.3698.5198.4698.4897.6797.59aa(%)88.4288.5588.5388.2787.7787.71time(s)130.3139.5157.3179.4204.7221.0
[0153]
表9参数n对up分类精度的影响
[0154]
n102030405060oa(%)98.3798.7098.8398.9198.9898.43kappa(%)97.8398.3498.6198.5898.6298.27aa(%)87.6388.4088.6588.5788.7688.35time(s)137.3139.5144.3144.4145.7145.9
[0155]
从表7中可以看出,对于up数据来说,当σ1=2,σ2=1,σ3=2,σ4=2,σ5=1时分类精度最高,oa可以达到98.90%,kappa可以达到98.54%,aa可以达到88.61%。此外还讨论了两个重要参数k和n的取值对分类精度的影响,在表8中可以看出oa,aa和kappa大体上随着k的增加先上升后下降,当k=20时分类效果最好,此时oa可以达到98.85,kappa=98.51%,aa=88.55%。从表9可以看出,随着n的增加,分类性能的变化趋势也呈现先上升后下降的趋势,当n=50时,oa=98.98%,kappa=98.62%,aa=88.76%。为了获得更高的分类精度,对于up数据而言,本文设置λ1=0.003,λ2=0.015,λ3=0.01,λ4=0.02,λ5=0.05,σ1=2,σ2=1,σ3=2,σ4=2,σ5=1,k=20,n=50。
[0156]
4.3结果对比
[0157]
在这部分,将使用不同的特征提取策略和我们所提出的特征提取方法进行对比,分类器统一使用带有rbf核的svm,设置c=σ=24.5,对比方法有六种:
[0158]
svm:用带有rbf核的svm对数据直接进行分类;
[0159]
asps(ed):使用提出的自适应子空间划分策略(adaptive subspace partitioning strategy,asps)得到光谱特征,波段间的相似度测量使用欧氏距离,不再提取空间信息。
[0160]
asps(id):使用提出的自适应子空间划分策略得到光谱特征,波段间的相似度测
量使用信息散度光谱特征,不再提取空间信息。
[0161]
asps-lbp:使用提出的自适应子空间划分策略得到光谱特征,再利用lbp提取空谱联合特征,设置b=10,r=1。
[0162]
asps-gicm:使用提出的自适应子空间划分策略得到光谱特征,再使用glcm提取空谱联合特征,选择4个不同的方向(0
°
,45
°
,90
°
,135
°
)。
[0163]
asps-bf:使用提出的自适应子空间划分策略得到光谱特征,再使用双边滤波器(bilateral filter,bf)对图像提取空谱联合特征;滤波半径w、空域标准差δ
α
、灰度标准差δr分别设置为w=15,δ
α
=8,δr=3。
[0164]
asps-mrtv(am):使用我们提出的特征提取框架得到空谱联合特征。
[0165]
首先对ip数据使用上述7种方法进行实验,得到的结果如表10所示。
[0166]
表10不同特征提取方式对ip分类性能的影响
[0167][0168]
表10中加粗表示最优分类精度,通过该表可以看出本文提出的asps-mrtv具有最好的分类性能,其中oa可以达到97.06%,kappa可以达到96.64%,aa可以达到85.95%。相比较于其他算法,在oa上至少提高了5.24%,kappa至少提高了7.42%,aa提高了至少6.96%。在ip数据的分类结果中,asps(ed)的精度还要低于svm,这说明,ed虽然是一种常见的利用距离计算波段相似度的方式,但并不适用于高维数据。asps(id)相比较asps(ed)分类精度提高了28.44%,说明信息散度作为波段相似度评判标准,可以在减少冗余的同时保留更多有益信息。asps(id)相比较svm分类精度提高了9.8%,说明本文提出的光谱特征提取框架可以增加ip数据的类别可分性。asps-bf、asps-mrtv相比于asps-glcm、asps-lbp精度都有明显的提高,这说明相比于纹理特征,结构特征对ip数据的分类问题更有效,因为图像的纹理中包含不同程度的噪声,而传统的纹理特征提取方法无法有效地去除噪声,使得分类精度不高。而asps-mrtv的分类精度高于asps-bf这说明本文提出空间特征提取框架mrtv能兼顾多种地物的空间结构信息,有效地提高了svm在ip数据上的分类精度。图6为不同方法下分类效果的展示,可以看出asps-mrtv分类误点最少,最接近地面真实图。
[0169]
对up数据使用上述7种方式进行实验,结果如表11所示。
[0170]
表11不同特征提取方式对up分类性能的影响
[0171][0172]
表中加粗表示分类精度最优的值,结果表明asps-mrtv特征提取框架的效果最佳,oa可以达到98.98%,kappa可以达到98.62%,aa可以达到88.76%。而传统svm的分类效果最差,说明空谱联合特征提取对高光谱图像分类的必要性。asps(id)的分类精度高于asps(ed),再次说明信息散度用作ip数据波段之间的相似度的评判标准的有效性。asps-lbp、asps-glcm、asps-bf、asps-mrtv的分类精度均高于asps(id)和asps(ed),这说明在提取光
谱特征的基础上增加空间特征更有利于高光谱图像的分类。asps-bf和asps-mrtv的分类精度高于使用纹理特征的asps-glcm和asps-lbp,再次说明了提取结构特征对于高光谱数据的分类问题效果更好。up数据的分类效果展示如图7所示,从图中可以看出(b)、(c)、(d)没有经过空间特征提取,存在更多的分类误点,而asps-bf和提出的空谱联合特征模型asps-mrtv分类误点最少,这也再次说明了结构特征对噪声具有鲁棒性,能有效地提高分类精度。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。