用于pet成像系统设置和质量控制的利用轴向短体模的连续床运动采集
1.相关申请的交叉引用本技术根据35 u.s.c.
ꢀ§ꢀ
119(e)要求保护于2019年10月9日提交的美国临时申请第62/912,817号的优先权,该美国临时申请的全部内容通过引用并入本文。
技术领域
2.本公开总体上涉及医学成像,并且更具体地,涉及正电子发射断层摄影(pet)系统中用于连续床运动采集模式的时间对准校准和晶体效率归一化的系统和方法。
背景技术:
3.pet是一种核医学模式,用于通过采用由患者摄入或注射到患者体内的放射性药物发出的伽马光子,来对代谢过程进行成像。在多个方向上取得多个pet数据,以生成/重建三维pet图像和/或pet图像的多个切片。在图像重建之前,pet原始图像数据处于投影/正弦图空间中。pet扫描通常提供关于身体组织和系统(诸如心血管系统、呼吸系统和/或其他系统)的功能状况的有用信息。pet扫描对于指示软组织肿瘤的存在或流向身体某些器官或区域的血流减少是有用的。
4.时间对准(ta)程序指代校准pet扫描仪以用于使两个检测器之间的任何剩余时间偏移相符合的过程。虽然硬件和电子器件尽可能地仔细匹配,但是可能遗留一些时间差异。这些时间差降低了飞行时间(tof) pet扫描仪的性能,因为tof pet扫描仪沿着响应线(lor)检测符合事件的定位。为了确保tof数据中时间信息的正确性,定期对tof pet扫描仪执行ta程序。
5.tof数据重建图像显示出对数据不一致性的较低敏感性,诸如校正因子中的系统误差。另一方面,tof重建的质量很大程度上取决于时间信息的正确性。为了确保pet扫描仪中tof重建的准确时间信息,在pet扫描仪中定期执行ta程序,也称为定时校准。在2012年1月3日授权的美国专利第8,089,043号中公开了用于pet扫描仪系统的ta校准的示例,该美国专利的内容通过引用并入本文。
6.通常,测试对象(模型)用于校准和/或验证(qc)核医学成像设备(诸如pet扫描仪)的准确性。体模是一种包含以已知形状和贯穿其全身的分布的正电子(β )发射活度的对象。因此,通过对体模进行成像,可以评估pet仪器及其软件的准确性,并且如果需要,则可以调整设置。
7.常规地,使用圆柱体体模对pet、pet/ct和pet/mr系统进行质量控制和校准,所述圆柱体体模包括68ge作为正电子源,分散在固体聚氨酯基质中,并封装在聚乙烯壳中。圆柱形便于通过对称性进行后续分析。
8.对于ta程序,将均匀活度(activity)圆柱体体模放置在检测器视场(fov)的中心处。假设源自特定检测器的所有lor具有以零为中心的tof质心。然后,相应地选取每个晶体时间偏移(to)。生成的to存储在系统中,并且在每个lor tof信息移位的数据重组期间使
用,lor tof信息移位是符合晶体to的组合。
9.圆柱体体模与成像体积的轴向范围相比更长,因此21 cm直径
×
35 cm长的尺寸是典型的。体模相当重,大约10-15 kg,并且需要超过100 kg的铅来保护技术人员、扫描仪、患者和其他人在不使用时免受大量湮没伽马光子的影响。
10.在现代pet扫描仪中,pet扫描仪的长度变得更长,以试图延长fov,并且因此获得灵敏度。缩放体模以匹配具有不断增加的轴向范围的这些pet扫描仪的更长fov是不切实际的,因为存在伽马光子的过度衰减和散射,并且体模在存储时变得过重且难以遮挡。
11.基于硅光电倍增管(sipm)的检测器的开发显著提高了pet扫描中的tof分辨率。例如,西门子新一代sipm原型pet/ct扫描仪已经达到大约250 ps的tof分辨率。然而,由于基于sipm的检测器中tof分辨率的提高,因此验证tof信息需要更高的标准,因为tof重建对于基于不准确时间测量的事件的任何错位是敏感的。
12.通常,pet扫描仪质量控制(qc)程序每天在均匀的圆柱体体模上执行,用于pet扫描仪校准,涉及晶体效率(ce)估计和时间对准(ta)。然而,这样的体模相对庞大和沉重,并且在临床环境中不一定是最佳的。最近,引入了自校正方法,诸如用于任意对象(包括患者)的ta和ce估计的基于患者的qc程序。
13.因此,需要一种改进的ta和ce估计程序,其为长fov pet扫描仪系统的qc程序提供更准确的系统设置。
技术实现要素:
14.本文公开了通过使用轴向短校准体模来改进用于具有长fov的pet扫描仪系统的ta和ce估计程序的新颖方法,所述轴向短校准体模与常规使用的校准体模相比具有更短的总长度。
15.连续床运动(cbm)采集和重建目前是许多pet扫描仪的标准。这种类型的采集开启了使用轴向短并且因此轻的体模用于系统设置的可能性。在cbm采集中,来自各种检测器对的计数被组合在一起,将床运动考虑在内。虽然这对于准确的活度重建是有益的,但是由于对运动的平均,轴向检测器结构会丢失。为了对检测器特性进行可行的估计,产生了类似于步进和拍摄(s&s)数据的附加“静态”数据。在该补充的集合中,在保持检测器轴向结构的同时,活度在运动上被积分。同一重组器可以用于生成这两个数据集;在一种情况下,运动被积分到重组过程中,并且在第二种情况下,它被忽略。使用这两个补充的数据集,在cbm中可实现pet活度和pet检测器特性的同时重建。
16.本文公开了在cbm系统设置期间使用轴向短均匀体模的ta设置程序和晶体效率(ce)归一化估计。虽然cbm“静态”扫描在轴向方向上自然是均匀的,但是这些数据的精确建模需要重建cbm数据。本公开涉及ta设置和ce估计的改进。
17.在ta设置程序中,在没有tof信息的情况下产生cbm数据,因为此时to未知。这些数据通过普通的非tof cbm重建方法进行重建。
18.在静止坐标系中采集的补充数据集被建模为来自先前步进重建的图像的运动模糊tof投影。注意,衰减包括在模糊操作中,因为它没有从活度投影中分离出来。基于数据动量,在ta程序中使用所产生的tof数据。
19.在一些实施例中,公开了一种用于pet扫描仪系统的时间对准(ta)方法。该方法包
括:接收列表模式数据;生成非飞行时间(tof)投影数据、扫描仪效率归一化阵列n和衰减因子a;从非tof投影数据重建图像f,通过归一化阵列n针对扫描仪效率进行校正,并通过衰减因子a针对衰减进行校正;对非tof和tof散射s以及非tof和tof投影进行建模;对于每条响应线,从建模的tof数据的零阶矩m0和一阶矩m1对真实符合分布的tof质心(建模的tof com)进行建模;对于每条响应线,计算测量的tof质心(测量的tof com);以及通过在所测量的tof com和建模的tof com之间求差来确定tof时间偏移to。
20.在ce估计程序中,对取自轴向短体模的cbm数据执行tof重建。tof图像重建和ce更新之间的交替最终导致对活度和ce分量的正确估计,直到达到缩放参数。在唯一的图像tof重建中使用来自旋转杆采集的ce估计(用于导出所有归一化分量),随后通过v.y, panin的
ꢀ“
simultaneous activity and crystal efficiencies reconstruction: tof patient-based detector quality control”,ieee mic 2014中描述的最大似然交替条件期望(ml-ace)算法的十次迭代进行ce更新。
21.通过在ta和ce估计程序中使用轴向短圆柱体体模,通过移动短圆柱穿过较长fov,轴向较长pet扫描仪的轴向较长fov。
22.在一些实施例中,公开了一种编码有用于控制pet扫描仪的程序指令的非暂时性机器可读存储介质。当处理器执行程序指令时,处理器执行本文所公开的用于pet扫描仪的ta的方法和/或ce估计的方法。
附图说明
23.图1是根据本公开实施例的具有时间对准校准管理器的pet扫描仪系统的高级框图;图2是根据本发明实施例的pet扫描仪检测器的透视图和与体模一起使用的环形检测器的二维前视图;图3a是图示本公开的ta程序的流程图300;图3b是图示本公开的用于cbm模式pet扫描仪的ta程序的流程图400;图4a和4b图示了cbm采集设置中的两个坐标系。仅标记了轴向轴;图5是图示根据本公开的一些实施例的用于通过cbm扫描轴向短圆柱体体模60为pet扫描仪生成ce归一化估计的方法的流程图600;图6示出了ml-ace算法步骤中使用的数据集;图7a示出了根据本公开的轴向短圆柱体体模的示例,所述轴向短圆柱体体模放置在被安装在cbm床上的标准支架上;图7b示出了活度、横断面(左)和冠状面(右)视图的cbm数据重建;图7c示出了基于ct的衰减图,横断面(左)和冠状面(右)视图;图8a-8d示出了“静态”扫描数据的建模正弦图,其是轴向短圆柱体体模的运动模糊衰减投影;图9a-9c示出了通过两种不同方法进行的检测器晶体to估计及其差异;图10a-10e示出了标准和cbm设置情况下的ce估计;图11a示出了使用cbm轴向短圆柱体体模导出重建和标准归一化导出重建的均匀圆柱体的归一化差异图像。顶部的视图是横断面视图,底部的视图是冠状面视图;
图11b示出了使用虚拟圆柱体导出重建和标准归一化导出重建的均匀圆柱体的归一化差异图像。顶部的视图是横断面视图,底部的视图是冠状面视图;图12是根据一些实施例的适用于图1的系统的计算机系统示例的详细框图。
具体实施方式
24.示例性实施例的该描述旨在结合随附附图进行阅读,所述附图要被视为整个书面描述的一部分。
25.图1是pet扫描仪系统100的高级示意图,pet扫描仪系统100包括pet检测器环105、控制单元101和病床260。控制单元101可以包括中央控制器28、任何必要的存储器26、符合处理器110、ta管理器135和图像重建单元115。ta管理器135是微处理器,其被适当地配置用于执行本文公开的ta程序。pet检测器环105包括闪烁体晶体130和光电倍增管125,它们以围绕患者隧道的环形配置提供,患者床260在患者隧道中进出。
26.通常,在进行pet扫描之前,对活体受试者,例如患者,注射短寿命放射性示踪同位素(例如,通常进入血液循环)。示踪同位素例如是氟脱氧葡萄糖(fdg),它是一种糖。在pet扫描期间,随着示踪剂同位素衰变,从浓缩示踪剂的组织中记录数据。
27.随着浓缩示踪剂的组织经历正电子发射衰变,该组织发射正电子,这是具有相反电荷的电子的反粒子。正电子最终与电子碰撞,产生一对沿相反方向移动的湮没(伽马)光子。当伽马光子到达pet检测器环105中的闪烁体晶体130时,它们被检测到,从而创建由光电倍增管125检测到的光突发。这对光子沿大致相反的方向移动并且由符合处理单元110处理,以确定检测到的这对光子是否源自符合事件。如果是,则表示检测到的光子对的信号被发送到图像重建单元115,用于使用数学图像重建程序生成的图像数据。
28.ta设置程序符合处理单元110包括ta管理器135,其促进针对符合的两个检测器之间的任何剩余to校准pet检测器。尽管ta管理器135被示出为符合处理单元110的一部分,但是ta管理器135可以是单独的独立单元或者pet系统100的另一组件的一部分,诸如图像重建单元115。
29.图2是根据本发明实施例的具有检测器环105的pet检测器的透视图。在该示例中,检测器环105是pet机架105a的一部分,并且具有427.6 mm的半径和672个晶体/间隙(例如,晶体a和b)。cbm患者床260位于pet扫描架105a的前面。在图2的右侧是检测器环105的示意放大图,示出了通过检测器晶体a到检测器晶体b之间的fov 215的示例lor 210。
30.tof事件是到达晶体a的符合事件减去到达晶体b的符合事件的时间的时间差。本领域技术人员应当领会,tof事件的定位可以从符合的时间差中计算。tof事件的定位可以在lor上的某处确定。在计算to时,正时间方向一般是从检测器晶体a到检测器晶体b。
31.本文描述了用于使用轴向短体模来校准pet检测器105的时间对准的ta程序。在本文描述的ta程序中,轴向短体模的列表模式数据文件是可用的,并且不需要进行轴向短体模的ct扫描,因为轴向短体模的参数是已知的,并且可以根据pet数据确定体模的定位。然而,在一些实施例中,可以对轴向较短的体模进行ct扫描。
32.本文所述的cbm采集模式中的ta程序类似于美国专利申请公开号2020/0033491a1中公开的用于使用患者cbm扫描数据的通用自ta程序。美国专利申请公开号2020/0033491a1的公开内容通过引用并入本文。然而,在这里,轴向短体模的cbm扫描数据被用于
准确的ta估计。
33.to(晶体时间偏移)估计具有空间(径向()、方位角()和轴向(),其包括极角段)投影索引和tof仓(bin)索引t的tof即时数据集y可以通过使用以下等式(1)通过组合建模投影和散射估计s以及平均随机函数来进行建模,所述建模投影来自发射对象f,由体素索引k定义,由归一化阵列n针对扫描仪效率进行校正,由a针对衰减进行校正,所述散射估计s也针对扫描仪效率进行校正:其中是tof提示数据集y的平均值,c是几何投影系统矩阵。在非tof标记法中,t索引将被省略,因为对t执行求和。根据公认的常规惯例,变量上方带
“‾”
条的变量标示平均值。
34.图3a是图示由ta管理器135执行的本公开的ta程序的流程图300。参考流程图300,在一些实施例中,系统的ta管理器从轴向短圆柱体体模的pet扫描接收列表模式数据(框305)。所使用的发射数据不需要对体模进行ct扫描。根据列表模式数据,生成非tof投影数据(框310),以及归一化阵列n(框312)和衰减因子a(框314)。医学成像技术领域的普通技术人员应当容易理解如何从列表模式数据中生成这些。
35.流程图300还涵盖衰减校正的另一选项,其中衰减通过对轴向短圆柱体体模的ct扫描获得(框307)。
36.接下来,从非tof投影数据重建图像f(框320),通过归一化阵列n针对扫描仪效率进行校正,并且通过衰减因子a针对衰减进行校正。在步骤330中,已知f,对非tof和tof散射s以及非tof和tof投影进行建模,这里应当注意,如医学成像技术领域的普通技术人员应当容易理解的那样,f、n、a、s以及是向量。
37.然后在步骤350中,对于每个lor,通过从建模的tof数据的零阶和一阶矩进行建模来估计真实符合分布的建模的tof质心(com)数据。这是使用下面的等式组(2)来实现的:,其中,并且。
38.注意,在每个lor的com估计中,不需要归一化(在分子和分母上消除)。注意,m0独立于时间分辨率模型。这意味着对于任何分辨率的扫描仪,例如250或500 ps,m0将保持不变。此外,如果在现实中tof曲线不是高斯的,而是其他对称的曲线,则m0仍将是相同的值。假设归一化对称tof核,m1在真实未散射部分中也独立于时间分辨率模型。这可能是本发明方法的一个重要优点,因为不能保证均匀的(跨各种lor)时间分辨率,并且可以不需要确切
的知识。
39.在列表模式处理中,由步骤340表示,使用以下等式组(3)也针对每个lor计算所测量的tof com,:,其中是所测量的tof com,并且。
40.注意,分母中的总质量m0是通过使用建模数据而不是测量数据来计算的,以通过除法抑制噪声放大。lor归一化(其是针对每个lor单独计算的归一化系数)用于所测量的数据。在以前的标记法中,正弦图是压缩数据,其是包含多于一个lor的投影仓。因此,在声谱图数据的lor上组合归一化。列表模式的投影数据不被压缩,每个仓包含一个lor。m1的计算包括减去延迟事件r和加上即时事件y。
41.在步骤360中,确定tof时间偏移to。这是通过在来自等式组(3)的所测量tof com, 与来自等式组(2)的建模tof com, 之间求差来实现的:。
42.由单个检测器晶体定义,由索引i和j标示,并且to由to标示。在优化程序中使用未加权的高斯模型来估计to:其中l是所测量的时间偏移和建模的时间偏移之间的最小二乘差,并且是lor贡献因子,定义如下:。
43.注意,贡献因子保持跟踪有序的i,j对,因为tof信息是有方向的。下面的等式(5)是坐标下降(cd)优化算法更新等式:,其中
ꢀꢀꢀ
(5)。
44.在等式(5)中,l是单个晶体to的顺序更新的子迭代次数,m是所有晶体都更新一次时的迭代次数。注意,等式(5)包含源自晶体i的数据的扇和,并且ni标示晶体i和所有可能的晶体j之间符合的lor的数量
由于to仅定义为加性常数,因此在算法的每次迭代后,to由常数因子更新,以确保特性:(6)。
45.用于ta程序的cbm采集情况用于确定to的方法的方案也适用于cbm采集情况。
46.如图4a和图4b所示,在cbm采集中存在两个坐标系要与之抗衡。一个是房间的坐标系,与扫描仪对准。在第二种情况下,房间和扫描仪在移动,而病人是静止的。扫描仪数据由轴向平面坐标z表示,其包括极角。移动对象虚拟lor具有相同的横断面坐标,但是由不同的轴坐标描述。我们标示一个函数,其中我们将坐标映射到扫描仪系统坐标为,其中t是采集持续时间。该函数使用对象/床轴向运动知识。该函数将房间和移动扫描仪系统的轴向坐标与最近邻近似对齐,以便在数据重组期间保持泊松统计。重组器产生两种类型的数据:用于活度重建的cbm,和用于to估计的静态数据。活度,即pet图像,是根据cbm非tof投影数据重建的。使用以下等式组(7)对在静止坐标系中采集的补充数据集com进行建模:(7)其中,、和被如上针对静止床系统定义。
47.由模糊算子b修改建模的tof数据,以计及在cbm模式下床运动期间的模糊。由cbm运动引起的模糊算子b可以标示为(8)其中,是特定同位素的衰变校正常数,是克罗内克符号,d是死区时间校正因子,t是采集时间。注意,建模数据的定义包括模糊操作中的衰减。
48.一旦定义了运动模糊建模com数据,就根据表达式(3)计算测量com,现在在扫描仪坐标系中,并且to估计程序与(4)-(6)中描述的相同。
49.图3b是图示由ta管理器135执行的cbm系统中的本公开的ta程序的流程图400。参考流程图400,在一些实施例中,系统的ta管理器从轴向短圆柱体体模的pet扫描接收列表模式数据(框405)。所使用的发射数据不需要对圆柱体体模进行ct扫描。利用列表模式数
据,利用cbm床运动知识(框411)生成cbm非tof投影数据(框410)。床运动数据存储在列表模式数据文件中,并且以几分之一秒的间隔报告,精度为几分之一毫米。这提供了床运动知识。cbm数据生成是将列表模式事件分配到适当的声谱图平面中的动态过程。转换成cbm声谱图空间中的直方图的列表模式事件利用轴向上的最近邻插值。换句话说,当cbm床移位的距离等于声谱图平面之间的间距时,来自同一检测器对的事件将被分配给下一个图像数据平面。还利用cbm床运动知识(框411)生成归一化阵列n(框412)。归一化阵列n是通过模拟对象通过扫描仪的移动来计算的,由对基本扫描仪采集参数(诸如单光子计数率)的监控来辅助。该程序基本上是专门针对每个正弦图平面进行平均的扫描仪归一化系数。衰减因子a也从列表模式数据中生成(框414)。医学成像技术领域的普通技术人员应当容易理解如何从列表模式数据中生成这些。
50.流程图400还涵盖衰减校正的另一选项,其中衰减因子a从轴向短体模的ct扫描中获得(框407)。
51.接下来,从cbm非tof投影数据重建图像f(框420),通过归一化阵列n针对扫描仪效率进行校正,并通过衰减因子a针对衰减进行校正。在步骤430中,已知f,对运动模糊的非tof和tof散射s以及运动模糊的非tof和tof投影进行建模。这里提到的运动模糊归因于cbm模式中的床运动。这里要注意的是,如医学成像技术领域的普通技术人员应当容易理解的那样,f、n、a、s和是向量。
52.从框420中提到的cbm非tof投影数据重建图像f的过程是本领域技术人员已知的。这样的过程的示例可以在如下中找到:v.y. panin等人的“continuous bed motion on clinical scanner: design, data correction, and reconstruction”,phys. med. biol. 59 (2014) 6153-6174,其全部内容通过引用并入本文。
53.然后在步骤450中,对于每个lor,通过从建模的tof数据的零阶矩和一阶矩进行建模来估计在静止坐标系中采集的真实符合分布的tof质心(com)数据。这是使用上面讨论的等式组(7)来执行的:,其中,,并且。
54.如同上面讨论的静止床模式计算,注意在每个lor的com估计中不需要归一化(在分子和分母上消除)。注意,m0独立于时间分辨率模型。这意味着对于任何分辨率的扫描仪,例如250或500 ps,m0将保持不变。此外,如果实际上tof曲线不是高斯的,而是其他对称的曲线,则m0仍将是相同的值。假设归一化对称tof核,m1在真实未散射部分中也独立于时间分辨率模型。这可能是本发明方法的一个重要优点,因为不能保证均匀的(跨各种lor)时间分辨率,并且可以不需要确切的知识。
55.在列表模式处理中,由步骤440表示,也使用下面的等式组(3)针对每个lor计算所
测量的tof com,:,其中是所测量的tof com,并且。
56.注意,分母中的总质量m0是通过使用建模数据而不是测量数据来计算的,以通过除法抑制噪声放大。lor归一化(其是针对每个lor单独计算的归一化系数)用于测量数据。在以前的标记法中,正弦图是压缩数据,其是包含多于一个lor的投影仓。因此,在声谱图数据的lor上组合归一化。列表模式投影数据不被压缩,每个仓包含一个lor。m1的计算包括减去延迟事件r和加上即时事件y。
57.在步骤460中,如在静止床情况下,确定tof时间偏移to。这通过首先在来自表达式(3)的所测量tof com,与来自表达式(7)的建模tom com,之间求差来完成:。
58.由单个检测器晶体定义,由索引i和j标示,并且to由用to标示。上面讨论的未加权高斯模型(4)被用于优化程序中以估计to。
59.时间对准系统ta程序产生存储在系统中并且在符合处理器级处应用的估计。这导致列表模式文件包含针对每个符合光子对的正确定时信息(即,针对to进行调整)。系统ta程序不经常执行。
60.ta程序与上面在to估计和cbm采集情况中描述的相同,除了其估计特定数据集的to,并且在列表模式数据的附加重组期间考虑to估计。换句话说,ta程序检测存储在系统上的关于to估计的剩余to。只有重组的数据将包含正确的定时信息。
61.根据本公开的另一方面,公开了一种编码有用于控制pet扫描仪系统100的程序指令的非暂时性机器可读存储介质。当pet扫描仪系统的ta管理器135中的处理器执行程序指令时,该处理器执行用于pet扫描仪的ta的方法,其中所述方法包括:(a)在cbm模式下从轴向短体模的pet扫描接收列表模式数据;(b)生成非飞行时间(tof)投影数据、扫描仪效率归一化阵列n和衰减因子a;(c)从非tof投影数据重建图像f,通过归一化阵列n针对扫描仪效率进行校正,并且通过衰减因子a针对衰减进行校正;(d)对非tof和tof散射s以及非tof和tof投影进行建模;(e)对于每条响应线,通过从建模的tof数据的零阶矩m0和一阶矩m
1 来对真实符合分布的tof质心(com)进行建模来进行估计;(f)对于每条响应线,计算所测量的tof com;以及(g)通过在所测量的tof com和建模的tof com之间求差来确定tof时间偏移to。
62.在本公开中,当通过建模来完成某些参数或值的估计时,术语“估计”和“建模”可互换使用,以表示同一事物。
63.在非暂时性机器可读存储介质的一些实施例中,使用以下表达式执行步骤(e ):;其中,;并且;其中是表示径向()、方位()和轴向()投影的空间投影索引,其包括极角段;其中t是tof仓索引;其中是估计的tof com数据, 是建模的tof数据,是的一阶矩,是的零阶矩,并且c是几何投影系统矩阵。
64.在非暂时性机器可读存储介质的一些实施例中,使用以下表达式执行步骤(f ):,其中是所测量的tof com并且。
65.根据另一方面,公开了一种编码有用于控制cbm pet扫描仪的程序指令的非暂时性机器可读存储介质。当cbm pet扫描仪系统100的ta管理器135中的处理器执行程序指令时,该处理器执行用于cbm pet扫描仪的时间对准的方法,其中该方法包括:(a)在cbm模式中从轴向短体模的pet扫描接收列表模式数据;(b)生成cbm非飞行时间(tof)投影数据、扫描仪效率归一化阵列n和衰减因子a;(c)从cbm非tof投影数据重建图像f,通过归一化阵列n针对扫描仪效率进行校正,并通过衰减因子a针对衰减进行校正;(d)对运动模糊的非tof和tof散射s以及运动模糊的非tof和tof投影进行建模;(e)对于每条响应线,从建模tof数据的零阶矩和一阶矩中估计在静止坐标系中采集的真实符合分布的tof质心(com);(f)对于每条响应线,计算所测量的tof com;以及(g)通过在所测量的tof com和建模的tof com之间求差来确定tof时间偏移to。
66.在非暂时性机器可读存储介质的一些实施例中,使用以下表达式执行步骤(e ):;
其中,;并且其中是表示径向(ρ)、方位()和轴向()投影的空间投影索引,其包括极角段;其中t是tof仓索引;其中是估计的tof com数据,是建模的tof数据,是的一阶矩,是的零阶矩,并且c是几何投影系统矩阵;以及并且b是模糊算子,定义如下。
67.在非暂时性机器可读存储介质的一些实施例中,使用以下表达式执行步骤(f ):,其中是所测量的tom com并且。
68.ce归一化估计根据另一方面,公开了一种使用轴向短体模来对cbm采集模式进行扫描仪性能监控(即扫描仪校准)的方法。考虑到轴向床运动,来自各种检测器对的cbm数据形成、计数被组合在一起。虽然轴向ce结构对于活度重建是有益的,但是由于对轴向床运动进行平均,因此轴向ce结构实际上在对应的所计算归一化阵列中丢失了。如在美国专利申请公开号2015/0297168中公开的步进拍摄(s&s)静态采集中所做的,在轴向短体模的cbm采集模式扫描期间生成附加的补充数据。
69.在补充数据集中,来自轴向短体模的tof数据的活度在患者床的轴向运动上被积分,然而ce结构被保留。同一重组器可用于生成两个数据集。使用两个补充数据集,从来自cbm采集过程的轴向短体模tof数据同时重建活度和闪烁ce归一化分量变得可行。该算法可以被解释为具有闪烁ce归一化分量估计的嵌套循环的常规活度最大似然(ml)重建,其使用以不同方式压缩的相同数据。
70.通过考虑在cbm采集运动上积分的轴向短体模tof数据,可以对cbm采集的轴向短体模图像以及闪烁ce归一化系数进行估计。本文讨论的ce归一化估计程序类似于美国专利第10,482,596号中公开的程序,其被推广用于在cbm采集模式中使用患者扫描数据。美国专利第10,482,596号的公开内容通过引用并入本文。然而,这里使用轴向短体模的cbm扫描数据来生成准确的ce归一化估计。
71.仅需要估计ce归一化分量。这进一步显著降低了未知数的数量以及解对噪声的敏
感性,但是需要开发特定的重建算法。活度和晶体效率(a-ce)问题的ml重建具有附加的方面:散射事件建模参与效率估计,并且模型等式相对于具有已知活度的闪烁ce是非线性的。衰减和活度是多少被定义为比例常数,因为在估计中仅使用它们的乘积。因此,未知数的全局缩放是较小的问题,因为平均效率值是已知的,这是由于体素活度与放射性示踪剂的注射剂量的单独校准。
72.中央控制器28根据存储的指令进行操作,以执行本文所述的各种动作,诸如确定衰变校正效率、确定给定时间的单光子计数率、确定检测时间效率、计算归一化系数、对响应线数据进行归一化、和/或重建。中央控制器28由软件和/或硬件配置,以执行本文公开的方法的任何或所有动作。
73.图5是图示根据本公开的一些实施例的用于通过cbm扫描轴向短圆柱体体模60来为pet扫描仪生成ce归一化估计的方法的流程图600。轴向短圆柱体体模60安装在患者床206上,患者床206在体模60的cbm采集期间移动体模,如图7a所示。该方法包括(a)在cbm采集模式中生成轴向短圆柱体体模60的tof数据,同时计及患者床206在cbm采集期间的轴向运动,作为第一数据集(参见框610);(b)通过在cbm采集期间在患者床206的轴向运动上对轴向短圆柱体体模60的tof数据进行积分来生成补充数据集(参见框620);以及(c)从补充数据集同时重建活度和ce归一化系数(见框630)。
74.首先在下文中描述了中央控制器28的操作和配置。在以下讨论中更详细地描述了一个示例实现。
75.中央控制器28被配置为确定归一化系数。计算用于计及检测相对于患者的不同响应线的效率差异的权重。在cbm中,当相对于患者考虑时,响应线随时间的经过改变轴向定位。结果,各种检测器对和其他因素有助于检测的效率。这些可能随时间的经过而变化的因素被包括在归一化系数的计算中。
76.中央控制器28计及衰变。针对在pet扫描期间使用的同位素来确定衰变校正效率。同位素的衰变特性随时间的经过而改变。这种衰变中的变化用于衰变校正效率。
77.中央控制器28计及了床和患者的速度变化。随着床的速度改变,检测时间效率也改变。pet扫描期间在床或患者的不同时间和对应定位处的检测时间效率部分地基于速度来确定。
78.中央控制器28还可以计及其他因素,诸如扫描仪的单光子计数率的时间变化和/或扫描仪的归一化(例如,s&s或其他扫描协议中使用的归一化,在扫描期间无轴向床运动)。
79.中央控制器28应用归一化系数。对于每个给定的lor,活度由该lor的归一化系数进行加权。中央控制器28或另一处理器可以根据归一化的lor重建对象空间。
80.中央控制器28使用存储在存储器26中的事件(例如,响应线事件)、经验信息(例如,全球单光子计数率)和/或已知信息(例如,衰变校正常数)进行处理。为了处理,数据绕过存储器26,临时存储在存储器26中,或者从存储器26加载。
81.检测到的事件、lor信息(例如正弦图)、时间步、单光子计数率、衰变信息、扫描仪归一化信息、cbm归一化系数、重建的图像或其他数据存储在存储器26中。数据以任何格式存储。存储器26是缓冲器、高速缓存、ram、可移动介质、硬盘驱动器、磁、光、数据库或其他现在已知或以后开发的存储器。存储器26是单个设备或两个或更多个设备的组。存储器26是
pet系统100或远程工作站或数据库的一部分,诸如pacs存储器。
82.存储器26附加地或可替代地是具有处理指令的非暂时性计算机可读存储介质。存储器26存储表示由编程的中央控制器28可执行的指令的数据,用于计算连续床运动采集中的归一化系数。用于实现本文讨论的过程、方法和/或技术的指令在非暂时性计算机可读存储介质或存储器上提供,诸如高速缓存、缓冲器、ram、可移动介质、硬盘驱动器或其他计算机可读存储介质。计算机可读存储介质包括各种类型的易失性和非易失性存储介质。响应于存储在计算机可读存储介质中或其上的一个或多个指令集,执行在附图中图示或者在本文中描述的功能、动作或任务。所述功能、动作或任务独立于特定类型的指令集、存储介质、处理器或处理策略,并且可以由软件、硬件、集成电路、固件、微代码等单独或组合地操作。同样,处理策略可以包括多处理、多任务、并行处理等。在一个实施例中,所述指令存储在可移动介质设备上,用于由本地或远程系统读取。在其他实施例中,所述指令存储在远程位置,用于通过计算机网络或电话线传送。在又另外的实施例中,所述指令存储在给定的计算机、cpu、gpu或系统内。
83.pet系统100可以包括显示器。例如,中央控制器28从归一化的响应线数据重建被扫描的患者或对象。该重建用于对象或患者的功能的三维渲染、多平面重建或二维成像。图像显示在显示器上。显示器是crt、lcd、等离子屏幕、投影仪、打印机或用于显示图像的其他输出设备。
84.cbm数据重组根据本公开的一方面,通过cbm采集在轴向短体模的qc扫描期间进行扫描仪性能监控的方法涉及cbm数据重组。如上文结合图4a和4b所述,在cbm采集中存在两个坐标系统。一个是实验室,其与扫描仪对准。第二个是移动的,其中对象是静止的。cbm扫描仪数据由横断面径向坐标、方位角坐标和包括极角的轴平面坐标z表示。移动对象虚拟lor具有相同的横断面坐标,但是由不同的轴坐标描述。让我们标示一个函数,其中我们将坐标映射到扫描仪系统坐标上,为。该函数使用对象/床轴向运动知识。该函数将实验室和移动系统轴向坐标与最近邻近似对准,以便在数据重组期间保持泊松统计。重组器产生两种类型的数据:用于a(活度重建)的一个数据集以及用于ce估计的补充数据集。
85.活度重建步骤具有空间投影索引和tof仓索引t的tof即时cbm数据y可以通过组合如下各项来建模:来自发射对象f的真实事件(非散射伽马符合事件)建模投影,由体素索引k定义,通过a针对衰减通过归一化阵列n针对扫描仪效率进行校正;和散射估计s,也针对扫描仪效率进行校正;以及平均随机数据 :其中c是几何投影系统矩阵,其包含在处检测到源自活度阵列体素k的符合事件的概率,并且是晶体效率。cbm数据归一化(由坐标标示)是根据下式在计及cbm
期间的轴向移动的情况下从扫描仪归一化因子计算的(在时间上积分):其中,是特定同位素的衰变校正常数,是克罗内克符号,d是死区时间校正因子,并且t
acq
是cbm采集时间。死区时间校正——其在检测器处理相对较高的计数率时适应信号损失——由于单光子计数率可变而是时间相关的。等式(2)描述了虚拟lor效率相对于扫描仪lor效率的平均过程,并且由发明人在v.y. panin、a.m. smith、j. hu, f. kehren和m.e. casey的“continuous bed motion on clinical scanner: design, data correction and reconstruction”(phys. med. bio.,vol. 59,pp. 6153
–
6174,2014)中更详细地讨论。
86.扫描仪归一化因子(由坐标z标示)可以适应lor的混合和重组,如西门子扫描仪,将两个检测器晶体i和i’连接到投影仓中:,其中g是归一化阵列的几何分量。是由于混合和跨越数据压缩技术而进入投影数据的lor贡献因子,其中由下式定义:(4)。
87.由于(2)中对轴向移动的积分,cbm归一化阵列丢失了关于轴向ce结构的信息。因此,假设已知ce,所描述的数据集用于活度重建。
88.ce估计步骤(ce步骤)在静止坐标系中采集的补充数据集,即时数据,建模如下:其中运动模糊算子可以标示为。
89.注意,ce步骤建模的真实的定义包括模糊操作中的衰减。由于(6)中在移动上的积分,活度分布的轴向结构将丢失。
90.总采集时间在(2)和(6)之间可以不同,因为(5)中的建模不应包括重建的活度视场(fov)的轴向范围之外的投影。随机均值在两个数据集之间也不同,并且从延迟事件不同地估计。
91.ml-ace算法可以使用图6所示的两个数据集执行同时的活度和晶体效率归一化分量重建(a-ce)。在图6中,第一列表示建模的活度预测。第二列表示归一化阵列,直接平面。第一行是活度重建步骤(a步骤),第二行是ce归一化分量重建步骤(ce步骤)。垂直轴是轴向方向。通过迭代来执行优化;每个步骤被划分为上述两个步骤。a步骤是利用固定归一化(效率)阵列的活度更新,其中使用cbm tof数据。一种常用的有序子集期望最大化(os-em)算法。下面的目标函数要关于f最大化,其中f是如(1)中定义的活度图像。
92.ce步骤是由在v.y. panin的“monotonic iterative algorithms for crystal efficiencies estimation from normalization data and single rates estimation from compressed random coincidence data”(2013 ieee nucl. sci. symp. and med. imag. conf. (seoul, korea), m23-1, 2013)中描述的迭代算法更新的效率,其中运动模糊的活度和散射分布将从a步骤中得知。在该步骤中,使用补充的tof或非tof数据,并且在ce的估计中执行四次迭代。这里,目标是关于最大化以下目标函数:。
93.为了完整性,提供了ce步骤更新等式:为了完整性,提供了ce步骤更新等式:其中m是更新晶体效率的迭代次数。注意,tof信息在a和b的计算中被消除,其中和表示在tof 仓索引t上的和的总和。然而,tof信息在c的计算中被保留。如果
在ce步骤中使用非tof数据,则c的计算没有对t索引求和。
94.每个步骤使用同步单调更新算法。然而,这两个步骤合在一起可以表示顺序更新方法。该方法可以被解释为具有ce归一化分量估计的嵌套循环的常规活度ml重建,其有效地使用了相同的数据,但是以不同方式压缩。在下面的tof/非tof嵌套循环中,ml-ace将标示来自tof/非tof ce步骤数据的ce归一化分量估计。
95.ml-ace初始条件是由平均块值和均匀活度分布启动的ce。执行顺序更新方法的三次迭代。这有效地导致了os-em活度重建的3次迭代和21个子集以及ce归一化分量估计的12次迭代。
96.图12图示了示例性计算环境900,其中包括图1的中央控制器28的实施例。例如,计算环境900可以用于实现本文公开的方法。诸如中央控制器28和计算环境900之类的计算机和计算环境对于本领域技术人员来说是已知的,因此在此简要描述。
97.如图12所示,中央控制器28可以包括通信机构,诸如系统总线921或用于在中央控制器28内传送信息的其他通信机构。中央控制器28进一步包括与系统总线921耦合的一个或多个处理器920,用于处理信息。
98.处理器920可以包括一个或多个中央处理单元(cpu)、图形处理单元(gpu)或本领域已知的任何其他处理器。更一般而言,处理器可以包括用于执行存储在计算机可读介质上的机器可读指令的设备,用于执行任务,并且可以包括硬件和固件中的任何一种或其组合。处理器还可以包括存储可执行用于执行任务的机器可读指令的存储器。处理器通过操纵、分析、修改、转换或传输信息以供可执行程序或信息设备使用,和/或通过将信息路由到输出设备,来对信息起作用。例如,处理器可以使用或包括计算机、控制器或微处理器的能力,并且使用可执行指令进行调节,以执行通用计算机不执行的专用功能。处理器可以与任何其他处理器耦合(电耦合和/或如包括可执行组件),以使得能够实现它们之间的交互和/或通信。用户界面处理器或生成器可以包括电子电路或软件或这两者的组合,用于生成显示图像或其部分。用户界面可以包括一个或多个显示图像,使得用户能够与处理器或其他设备进行交互。
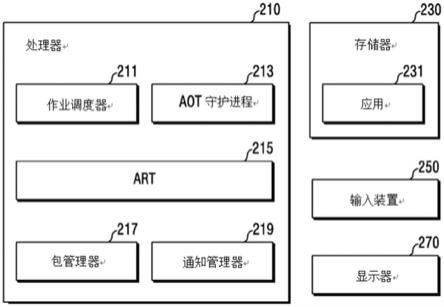
99.继续参考图12,中央控制器28还包括耦合到系统总线921的系统存储器930,用于存储信息和要由处理器920执行的指令。系统存储器930可以包括易失性和/或非易失性存储器形式的计算机可读存储介质,诸如只读存储器(rom) 931和/或随机存取存储器(ram) 932。ram 932可以包括(一个或多个)其他动态存储设备(例如,动态ram、静态ram和同步dram)。rom 931可以包括(一个或多个)其他静态存储设备(例如,可编程rom、可擦除prom和电可擦除prom)。此外,系统存储器930可以用于在处理器920执行指令期间存储临时变量或其他中间信息。基本输入/输出系统933 (bios)——其包含诸如在启动期间帮助在中央控制器28内的元件之间传输信息的基本例程——可以存储在rom 931中。ram 932可以包含处理器920立即可访问和/或当前正在由处理器920操作的数据和/或程序模块。系统存储器930可以附加地包括例如操作系统934、应用程序935、其他程序模块936和程序数据937。
100.中央控制器28还可以包括耦合至系统总线921的磁盘控制器940,以控制用于存储信息和指令的一个或多个存储设备,诸如磁硬盘941和可移动介质驱动器942(例如,软盘驱动器、致密盘驱动器、磁带驱动器和/或固态驱动器)。可以使用适当的设备接口(例如,小型计算机系统接口(scsi)、集成设备电子器件(ide)、通用串行总线(usb)或火线)将存储设备
添加到中央控制器28。
101.中央控制器28还可以包括耦合至系统总线921的显示控制器965,以控制显示器或监视器966,诸如液晶显示器(lcd),用于向计算机用户显示信息。计算机系统包括输入接口960和一个或多个输入设备,诸如键盘962和定点设备961,用于与计算机用户交互并向处理器920提供信息。定点设备961例如可以是鼠标、光笔、跟踪球或操纵杆,用于向处理器920传送方向信息和命令选择,并且用于控制显示器966上的光标移动。显示器966可以提供触摸屏界面,该界面允许输入来补充或替换由定点设备961进行的方向信息和命令选择的通信。
102.中央控制器28可以响应于处理器920执行存储器(如系统存储器930)中包含的一个或多个指令的一个或多个序列,来执行实施例的部分或全部处理步骤。这样的指令可以从另一个计算机可读介质,诸如磁硬盘941或可移动介质驱动器942,读入系统存储器930。磁硬盘941可以包含由各种实施例使用的一个或多个数据存储和数据文件。可以加密数据存储内容和数据文件以提高安全性。处理器920也可以在多处理布置中采用,以执行包含在系统存储器930中的一个或多个指令序列。在替代实施例中,可以使用硬连线电路来代替软件指令或者与软件指令相组合。因此,实施例不限于硬件电路和软件的任何特定组合。
103.一些实施例包括以高级语言编写的软件指令,诸如c、c 、c#、java、fortran或python。一些实施例是为多范式数值计算环境编写的,诸如马萨诸塞州纳蒂克的mathworks公司出售的matlab等。
104.如上所述,中央控制器28可以包括至少一个计算机可读介质或存储器,用于保存指令和用于包含数据结构、表、记录或本文所述的其他数据。本文使用的术语“计算机可读介质”指代参与向处理器920提供指令以供执行的任何非暂时性机器可读存储介质。计算机可读介质可以采取多种形式,包括但不限于非暂时性、非易失性介质和易失性介质。非易失性介质的非限制性示例包括光盘、固态驱动器、磁盘和磁光盘,诸如磁硬盘941或可移动介质驱动器942。易失性介质的非限制性示例包括动态存储器,诸如动态随机存取存储器930。
105.中央控制器28可以在使用与一个或多个远程计算机(诸如远程计算设备980)的逻辑连接的联网环境中操作。远程计算设备980可以是个人计算机(膝上型或台式)、移动设备、服务器、路由器、网络pc、对等设备或其他常见的网络节点,并且典型地包括上面相对于中央控制器28描述的许多或所有元件。当在联网环境中使用时,中央控制器28可以包括调制解调器972,用于通过网络971(诸如互联网)建立通信。调制解调器972可以经由用户网络接口970或经由另一种适当的机构连接到系统总线921。
106.网络971可以包括但不限于,互联网、内联网、局域网(lan)、广域网(wan)、城域网(man)、个域网(pan)、直接连接或一系列连接、蜂窝电话网络或者能够促进中央控制器28和其他计算机(例如,远程计算设备980)之间的通信的任何其他网络或介质。网络971可以是有线的、无线的或其组合。有线连接可以使用以太网、通用串行总线(usb)、rj-6或任何其他有线连接来实现。可以使用wi-fi、wimax和蓝牙、红外、蜂窝网络、卫星或任何其他无线连接方法来实现无线连接。附加地,几个网络可以单独工作或彼此通信,以促进网络971中的通信。
107.本文所述的功能和过程步骤可自动或全部或部分响应用户命令而执行。自动执行的活动(包括步骤)是响应于一个或多个可执行指令或设备操作来执行的,而无需用户直接启动该活动。
108.本文所述的方法和系统可至少部分体现为计算机实现的过程和用于实践这些过程的装置的形式。所公开的方法还可以至少部分地以编码有计算机程序代码的有形的、非暂时性的机器可读存储介质的形式来体现。该介质可以包括例如ram、rom、cd-rom、dvd-rom、bd-rom、硬盘驱动器、闪速存储器或任何其他非暂时性机器可读存储介质,其中,当计算机程序代码被加载到计算机中并由计算机执行时,该计算机成为用于实践该方法的装置。该方法还可以至少部分地以计算机的形式体现,计算机程序代码被加载和/或执行到该计算机中,使得该计算机成为用于实践该方法的专用计算机。当在通用处理器上实现时,计算机程序代码段配置处理器来创建特定的逻辑电路。可替代地,该方法可以至少部分地体现在用于执行该方法的专用集成电路形成的数字信号处理器中。
109.因此,根据本发明的一方面,公开了一种用计算机程序软件编码的非暂时性机器可读存储介质,使得当处理器执行计算机程序软件时,处理器执行用于cbm pet扫描仪中的ta的方法,其中该方法包括:(a)从cbm模式中的轴向短体模的pet扫描中接收列表模式数据;(b)生成cbm非飞行时间(tof)投影数据、扫描仪效率归一化阵列n和衰减因子a;(c)从cbm非tof投影数据重建图像f,通过归一化阵列n针对扫描仪效率进行校正,并且通过衰减因子a针对衰减进行校正;(d)对运动模糊的非tof和tof散射s以及运动模糊的非tof和tof投影进行建模;(e)对于每条响应线,从建模的tof数据的零阶矩和一阶矩估计在静止坐标系中采集的真实符合分布的tof质心(com);(f)对于每条响应线,计算测量的tof com;以及(g)通过在所测量的tof com和建模的tof com之间求差来确定tof时间偏移to。
110.根据一些实施例,公开了一种编码有计算机程序软件的非暂时性机器可读存储介质,使得当处理器执行计算机程序软件时,处理器执行用于在cbm采集期间监控pet扫描仪性能的方法,其中pet扫描仪具有患者床,其在cbm采集期间通过pet扫描仪以轴向运动移动轴向短圆柱体体模,该方法包括:(a)在轴向短体模的cbm采集期间生成飞行时间(tof)数据,同时计及cbm采集期间患者床的轴向运动,作为第一数据集;(b)通过在cbm采集期间对患者床的轴向运动上的tof数据进行积分来生成补充数据集;以及(c)从补充数据集同时重建活度和晶体效率归一化系数。
111.轴向短体模的用途本文所述的用于cbm ta程序和ce估计的“轴向短体模”的轴向长度与pet扫描仪的fov相比更短。本公开的轴向短体模包括圆柱形外壳,其具有常规长度,例如大约28 cm长。然而,进与pet扫描仪的fov更短的中心部分填充有活度。“轴向短”是指体模的活度填充部分与pet扫描仪的fov相比更短。图7a示出了根据本公开放置在安装在cbm床260上的标准支架上的这种轴向短体模600的示例。
112.图7b示出了活度、横断面(左)和冠状面(右)视图的cbm数据重建。
113.图7c示出了基于ct的衰减图,横断面(左)和冠状面(右)视图。
114.体模外壳的其余部分充满空气,在活度丝和将体模连接到cbm床的金属支架之间
形成缓冲。轴向短体模被设计成使得活度lor不穿过cbm床或体模支架。与标准的常规长度的体模相比,本文公开的轴向短体模大约更轻,使得其更易于处置。
115.用于确认的实验数据使用轴向短体模进行cbm ta程序,并且与使用常规的28 cm长体模进行的标准ta程序进行比较。在siemens vision pet/ct扫描仪上测试具有本公开的轴向短体模的cbm设置。有760(一个环中的横断面)x 80个(轴向环)检测器晶体。列表模式信息由13ps tof仓组成。在ta程序期间,时间窗口打开至6.7 ns,以避免时间方向上的数据截断。
116.在采集用于比较的轴向短体模cbm数据之前,使用常规的28 cm长体模执行标准ta程序。列表模式扫描由2.5亿个真值计数组成。该程序的结果是to阵列,其由固件下载,用于在4.7 ns时间窗口的以下列表模式数据采集中进行tof仓索引校正。
117.利用轴向短体模进行cbm扫描,无需下载估计to(无ta),以采集列表模式数据。扫描以0.3 mm/s的速度执行。在数据采集扫描开始和结束时,轴向短体模完全在扫描仪fov之外。这导致“静态”数据中的大约3.52亿个真实计数。一旦to被估计,它们就通过改变tof箱索引来在列表模式数据处理期间被应用。修改的列表模式文件用于ce估计。
118.出于比较目的,cbm数据也被视为静态扫描。为了产生长的虚拟圆柱扫描(从活度和衰减的观点来看),忽略了床的运动。该数据集经历了to和ce估计的标准程序。
119.根据美国电气制造商协会(nema)标准,将线源体模放置在扫描仪的中心,以评估时间分辨率。列表模式数据是在没有下载to的情况下采集的。在列表模式数据处理期间,通过改变tof仓索引来应用to。以该方式,使用相同的数据集来估计各种ta程序的性能。
120.图8a至图8d示出了“静态”扫描数据的建模正弦图,其是轴向短圆柱体体模的运动模糊衰减投影。图8a和8b示出了不同极角段的活度正弦图。图8a是直接平面正弦图。图8b是最倾斜的正弦图。图8c和图8d示出了在投影数据的建模中使用的衰减因子。图8c是直接平面衰减因子,冠状面视图。图8d是最倾斜的衰减因子,冠状面。可以提及的是,由于衰减的显著差异,直接正弦图和倾斜正弦图具有不同的结构。对于倾斜数据,活度lor除了穿过圆柱体体模的表面之外,还可以穿过其底部,这是直接平面lor的情况。该示例示出,通过移动短圆柱体构建的均匀虚拟圆柱体的可能假设可能是不适当的。因为在采集开始和结束时,体模在fov之外,所以投影数据极角段在轴向方向上是均匀的。
121.图9a至图9c示出了通过两种不同方法进行的检测器晶体估计及其差异。图9a示出了通过标准ta方法进行的to估计。图9b示出了通过cbm ta方法进行的to估计。图9c示出了差异。差异很小,并且主要归因于估计噪声。to值以tof仓为单位(每13ps)。
122.在应用标准ta to之后,线源tof分辨率为205.32 ps。cbm to导致同一数据集的205.61 ps 的tof分辨率。
123.图10a至图10e示出了标准和cbm设置情况下的ce估计。当轴向短圆柱体体模被正确建模时,观察到小的差异作为块边缘模式。对于虚拟圆柱体体模,差异跨轴向方向是不均匀的。衰减仅为近似的独特lor对其中直接平面具有适当衰减的轴向fov的边缘没有贡献。这样的不平衡在ce的估计中产生了不均匀性。图10a示出了通过标准方法进行的ce估计。图10b示出了使用cbm轴向短体模to的ce估计。图10c示出了图10a和图10b所示的ce估计之间的差异。图10d示出了使用虚拟圆柱体to的ce估计。图10e示出了图10a和图10d所示的ce估计之间的差异。
124.图10f示出了在一个检测器模块上平均的ce的轴向曲线。线(1)表示图10a所示的ce估计,线(2)表示图10b所示的ce估计,线(3)表示图10d所示的ce估计。
125.图11a和图11b检查了ce估计缺陷在圆柱体图像重建中的传播。图11a示出了使用cbm轴向短圆柱体体模导出的均匀圆柱体重建和标准归一化之间的归一化差异图像。图11b示出了使用虚拟圆柱体导出的均匀圆柱体重建和标准归一化之间的归一化差异图像。在图11a和图11b中,顶部的视图是轴向视图,底部的视图是冠状面视图。
126.具有标准qc归一化图像重建的标准qc采集被用作金标准。然后,在归一化阵列中替换ce分量,并且再次重建数据。利用cbm轴向短圆柱体体模获得的ce分量,图像差异示出小的圆形伪影。这些归因于观察到的块边缘模式。利用虚拟圆柱体体模导出的ce分量归一化,图像差异示出大约5%的轴向不均匀性,这可以归因于该ce分量的轴向不均匀性。
127.当pet扫描仪长度变得更长以试图获得灵敏度时,轴向长度比扫描仪轴向fov更短的体模是比为系统设置制造更长的体模更合期望的选择。静态扫描可以用于仅覆盖一部分可用lor。由于覆盖所有可能的lor是有益的,因此可以利用多次或cbm扫描。所呈现的结果证实,与标准ta相比,使用短的均匀圆柱体体模的cbm ta程序产生了实际上相同的to校正。
128.通过采用cbm重建,无需对虚拟(未计及床运动)投影数据进行假设。它允许使用具有附加的精细结构的更复杂模型,这也可以覆盖其他目的,诸如pet和ct扫描仪的空间对准。
129.轴向短体模的附加用途pet扫描仪cbm模式下的轴向短体模可以用于检查pet检测器的归一化系数。通过在轴向短体模移动通过pet机架的患者隧道的同时执行pet扫描,可以测量pet检测器沿pet扫描仪fov的均匀性,并用于确定检测器的归一化系数。
130.此外,由于体模具有均匀且已知的光子输出,因此cbm设置中的轴向短体模600可以用于通过在cbm模式下扫描轴向短体模600来检查cbm床260的轴向移动与pet检测器的对准。用于检查cbm床的轴向移动的对准的方法包括在cbm模式下从轴向短体模的pet扫描中采集列表模式数据;从列表模式数据计算轴向短体模的tof质心;以及将所计算的轴向短体模的tof质心与pet扫描仪台架的中心轴进行比较。
131.此外,由于轴向短体模较轻,因此可以以悬臂布置将其安装在cbm床260上,如图7a所示。在该悬臂布置中,轴向短体模600位于远离cbm床260延伸的位置并且在其前方。通过在轴向短体模移动通过pet台架时测量和跟踪其tof com,可以检查cbm床260的轴向对准。
132.轴向短体模600的悬臂布置允许将cbm床和体模保持硬件280的任何衰减效应最小化。
133.虽然已根据示例性实施例描述了主题,但不限于此。相反,所附权利要求应当被宽泛地解释,以包括本领域技术人员可以做出的其他变型和实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。