1.本发明涉及一种激光测深的自动化沉水植物种植船,属于水体沉水植物生态修复领域。
背景技术:
2.随着国民经济快速增长,水体环境污染逐渐严重,生态破坏逐渐加剧,生物多样性日益减少,生态系统功能逐步退化,不仅制约社会发展,而且危害人民健康,影响社会和环境安全。因此,对污染水体进行修复,使其恢复原有生态功能迫在眉睫。
3.水体修复技术包括物理修复、化学修复、生物修复与生态修复。与传统的物理化学修复技术相比,生态修复技术具有投资少、环境友好、无二次污染等突出优点,在污染水体修复中得到广泛应用。在污染水体的生态修复过程中,沉水植物具有十分重要的作用,不仅能通过根系、茎、叶的直接吸收和吸附作用降低水体中的可溶性和悬浮性颗粒,以去除水体中氮磷等营养物质,而且可为水生动物提供生存栖息地,扩大其有效生存空间,增加水中溶解氧。然而当前沉水植物种植方式多为人工种植,不仅费时费力,种植效率低,而且种植密度难以精准控制,种植效果差。因此研发沉水植物自动化种植技术尤为重要。
4.目前沉水植物自动化种植设备如专利号为zl201510064096.2的中国发明公开了一种沉水植物种植机,包括安装于船只上的第一承重架、安装于第一承重架上的控制台、植物放置装置和第二承重架、若干组种植杆以及齿轮;所述第二承重架上并排安装有若干由控制台控制的电动机和齿轮,所述齿轮并排设置并均与固定轴承连接,固定轴承通过传动链条将各个电动机与其对应的齿轮传动连接;所述种植杆并排竖直安装于第一承重架并插入水面,种植杆上正对齿轮的一侧设有若干与齿轮啮合的矩形开口,电动机带动齿轮运转进而带动各个植物杆作上下运动,采用压力传感器和阻力传感器获得水底底质硬度、水流速度、水底地形等数据;公开号为zl201620688662.7的中国实用新型公开了一种浅水区沉水植物种植设备,包括动力装置、分苗装置与插植装置,所述动力装置与分苗装置和插植装置相连,为所述分苗装置和所述插植装置提供动力,所述插植装置上设置有传苗口以及相对于水平面上下运动的压苗装置,所述分苗装置与所述传苗口位置相对,同样也是多采用压力传感器或阻力传感器来测量并确定种植深度,测量误差大,导致种植效果不佳。
技术实现要素:
5.本发明的目的是为了克服现有技术存在的缺点和不足,而提供一种激光测深的自动化沉水植物种植船。
6.一种激光测深的自动化沉水植物种植船,包括主船体、动力系统、控制模块、测深组件、传输组件、种植仓、种植组件与排水系统;所述种植仓位于主船体下方,所述传输组件包括设置在种植仓内的升降台、设置在主船体内的横向传送带和纵向传送带;所述种植组件包括设于种植仓内部的可伸缩取苗爪和可伸缩压苗杆;所述测深组件由gps定位仪与激光探测仪组成;所述控制模块连接至动力系统、测深组件、传输组件、种植仓、种植组件与排
水系统,用于收集信息及控制各个组件之间的启闭。
7.进一步的,所述gps定位仪与激光探测仪通过一杆件进行连接,垂直固定于主船体前部。
8.优选的,所述控制模块与测深组件位于主船体前部。
9.优选的,所述排水系统位于种植仓尾部,所述排水系统包括抽水泵和排水管。
10.优选的,所述种植仓顶端开有位于纵向传送带运动方向前方的内部输苗口,底端开有外部输苗口,所述升降台位于内部输苗口下方。
11.进一步的,所述种植仓内壁顶部设有滑轨,所述滑轨上设有第一滑动块和第二滑动块,所述可伸缩取苗爪和可伸缩压苗杆分别设于第一滑动块和第二滑动块上。
12.优选的,所述滑轨位于内部输苗口下方;所述外部输苗口位于滑轨下方。
13.进一步的,所述可伸缩压苗杆由外套筒、内套筒和中间压杆嵌套组成;所述中间压杆顶端装有两片可开合的扇叶。
14.进一步的,所述横向传送带与纵向传送带为垂直设置,所述横向传送带数量至少为一个。
15.本发明的有益效果如下:本发明采用自动化沉水植物种植船代替人工种植,不仅可提高种植效率,节约成本,而且能规范种植密度,所采用的激光测深技术能根据不同的水底地形条件精准控制种植深度,大幅提升种植效果。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
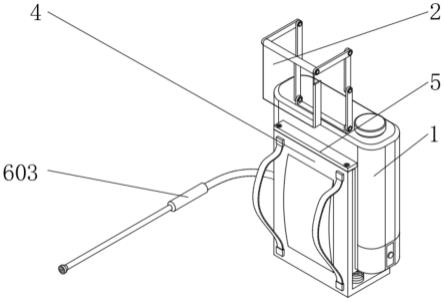
17.图1为本发明中种植船主船体结构示意图;
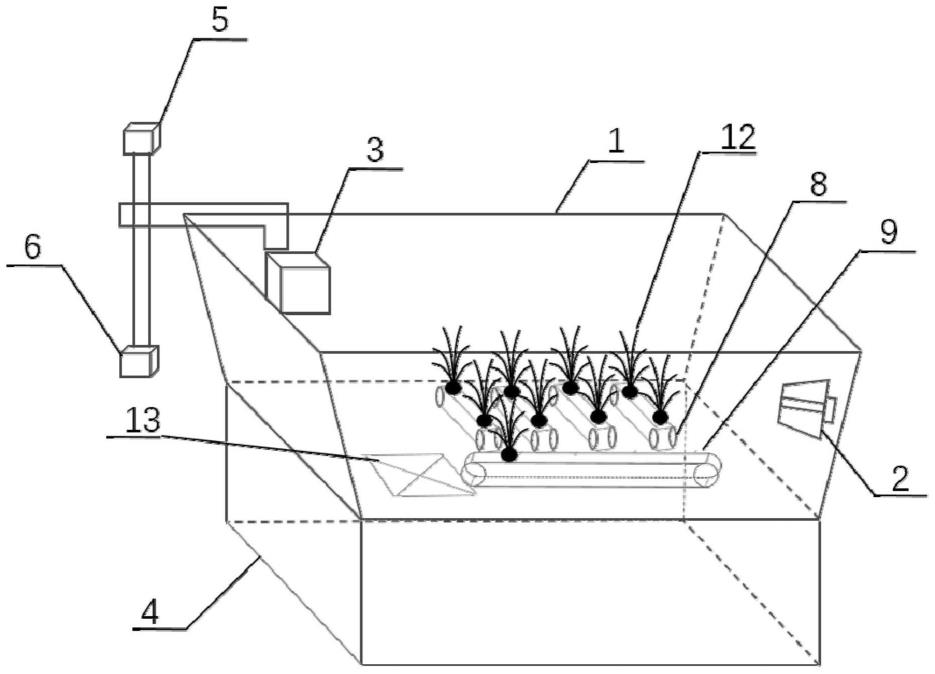
18.图2为本发明中种植仓内部结构示意图;
19.图中,1、种植船主船体;2、动力系统;3、控制模块;4、种植仓;5、gps定位仪;6、激光探测仪;7、升降台;8、横向传送带;9、纵向传送带;10、可伸缩取苗爪;11、可伸缩压苗杆;12、沉水植物苗;13、内部输苗口;14、滑轨;15、第一滑动块;16、第二滑动块;17、外部输苗口;18、外套筒;19、内套筒;20、中间压杆;21、扇叶;22、抽水泵;23、排水管。
具体实施方式
20.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
21.需要说明的是,本发明实施例中所有使用“第一”和“第二”的表述均是为了区分两个相同名称非相同的实体或者非相同的参量,可见“第一”“第二”仅为了表述的方便,不应理解为对本发明实施例的限定,后续实施例对此不再一一说明。
22.本发明所提到的方向和位置用语,例如「上」、「下」、「前」、「后」、「左」、「右」、「内」、「外」、「顶部」、「底部」、「侧面」等,仅是参考附图的方向或位置。因此,使用的方向和位置用语是用以说明及理解本发明,而非对本发明保护范围的限制。
23.如图1-2所示,为本发明一种激光测深的自动化沉水植物种植船的实施例,包括主船体、动力系统2、控制模块3、测深组件、传输组件、种植仓4、种植组件与排水系统;种植仓4位于主船体下方,传输组件包括设置在种植仓4内的升降台7、设置在主船体内的横向传送带8和纵向传送带9;种植组件包括设于种植仓4内部的可伸缩取苗爪10和可伸缩压苗杆11;测深组件由gps定位仪5与激光探测仪6组成;控制模块3连接至动力系统2、测深组件、传输组件、种植仓4、种植组件与排水系统,用于收集信息及控制各个组件之间的启闭,各个组件相互配合形成整体种植系统,通过测深组件中的gps定位仪5与激光探测仪6收集种植船实时位置信息和水深信息反馈至控制模块3,确定需要的种植信息后控制模块3能够根据收集到的信息将沉水植物以最适合生长的种植深度进行种植,替代人工种植,在提高种植效率的基础上也保证了种植精度优于使用压力传感器或阻力传感器进行测深的其它种植设备,提高了种植效果。
24.控制模块3为plc动力控制系统,能够整合信息并控制各个组件的开启和关闭,使其正常运行,顺利种植沉水植物,且plc动力控制系统是市场上的成熟技术,应用于多个领域,容易获取和使用,在此不多赘述。
25.gps定位仪5与激光探测仪6通过一杆件进行连接,垂直固定于主船体前部,控制模块3与测深组件位于主船体前部,有利于快速对水底环境进行探测,收集数据。排水系统位于种植仓4尾部,排水系统包括抽水泵22和排水管23,用于抽出种植仓4内因种植沉水植物灌入的水,避免影响下一次种植。横向传送带8与纵向传送带9为垂直设置,横向传送带8数量至少为一个,可以根据实际的使用情况确定横向传送带8的数量,便于适应不同的水域环境,纵向传送带9的数量为一个,横向传送带8与纵向传送带9均用于传送沉水植物苗12。
26.种植仓4顶端开有位于纵向传送带9运动方向前方的内部输苗口13,底端开有外部输苗口17,升降台7位于内部输苗口13下方,种植仓4内壁顶部设有滑轨14,滑轨14上设有第一滑动块15和第二滑动块16,可伸缩取苗爪10和可伸缩压苗杆11分别设于第一滑动块15和第二滑动块16上,第一滑动块15和第二滑动块16由电机或液压缸驱动,在滑轨14上滑动。可伸缩取苗爪10用于抓取种植仓4内的沉水植物,可伸缩压苗杆11用于对种植到位的沉水植物的周围进行压实,避免沉水植物随水流流动产生脱离种植泥土的问题,可伸缩取苗爪10和可伸缩压苗杆11均由电机或液压缸作为动力源带动启动进行上下移动的动作,电机或液压缸与控制模块3相连,由控制模块3控制动作。滑轨14位于内部输苗口13下方;外部输苗口17位于滑轨14下方,可伸缩压苗杆11由外套筒18、内套筒19和中间压杆20嵌套组成,中间压杆20顶端装有两片可开合的扇叶21,扇叶21也是由一个单独的驱动源例如电机驱动,通过控制模块3控制扇叶21的开合角度挖出种植坑和压实泥土,以适应不同的泥土环境,便于种植沉水植物,提高种植船的种植灵活性和实用性。
27.本发明的工作原理如下:
28.利用gps定位仪5获取种植船的实时位置,并将实时位置数据反馈至控制模块3,通过控制模块3调节动力系统2对种植船的平面位置进行精准校正;利用激光探测仪6精准探测其底面以下部分的水深,将水深数据反馈至控制模块3,控制模块3根据水深数据确定种植深度,并控制传输组件、种植仓4与种植组件完成以下一次种植过程:内部输苗口13打开,升降台7上升至一定高度,横向传送带8将沉水植物苗12输送至纵向传送带9上,纵向传送带9将沉水植物苗12输送至升降台7上,升降台7下降至一定高度,内部输苗口13关闭,第一滑
动块15带动可伸缩取苗爪10移动至升降台7上方,可伸缩取苗爪10伸长并抓取沉水植物苗,外部输苗口17打开,第二滑动块16带动可伸缩压苗杆11移动至外部输苗口17上方,扇叶21合拢,可伸缩压苗杆11伸长至一定长度将扇叶21插入底泥中,扇叶21张开,挖出一个小坑,可伸缩压苗杆11缩回,控制模块3控制第二滑动块16带动可伸缩压苗杆11移动至一侧,第一滑动块15带动可伸缩取苗爪10与沉水植物苗移动至外部输苗口17上方,可伸缩取苗爪10伸长将沉水植物苗放入小坑中,可伸缩取苗爪10缩回,第一滑动块15带动可伸缩取苗爪10移动至一侧,第二滑动块16带动可伸缩压苗杆11移动至外部输苗口17上方,可伸缩压苗杆11伸长至一定长度并控制扇叶21将沉水植物苗周围的底泥压实,可伸缩压苗杆11缩回,外部输苗口17关闭,抽水泵22将种植仓4内的水通过排水管23排出,完成一次种植。
29.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
30.虽然已经参考若干具体实施例描述了本发明,但是应当理解,本发明不限于所公开的具体实施例。本发明旨在涵盖所附权利要求的精神和范围内所包括的各种修改和等效布置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。