1.本发明涉及医疗康复设备技术领域,具体涉及一种基于柔性驱动器的外骨骼康复手套及其交互方法。
背景技术:
2.目前,对于因意外事故受伤或疾病而导致手部功能丧失的人群来说,由于手部功能的缺陷,会给他们的生活带来不便。如果手部长时间得不到运动,就会出现肌肉萎缩的情况,甚至造成关节和肌腱粘连,进而给手部造成不可逆性的伤害。手部的康复机器人主要分为外骨骼式和末端牵引式。相比于后者,外骨骼式康复机器人是根据人体工程学原理并结合仿生技术设计的,与人体的契合度高,穿戴舒适方便。但是目前,大多数外骨骼手部康复机器人都使用电机进行驱动。如已经公开的发明专利cn110314066a,其公开日为2019年10月11日,公开了一种外骨骼手指康复训练装置及其使用方法。外骨骼手指康复训练装置包括外骨骼手指康复训练机构,该外骨骼手指康复训练机构包括支撑座、指套作动机构以及与指套作动机构的动力输出端连接的指关节指套;指关节指套能够套接在待康复指关节外围,且指关节指套在指套作动机构的动力作动下,带动待康复指关节被动弯曲/拉伸,支撑座包括仿形壳,该仿形壳的内表面依照完整的手掌背面/部分的手掌背面仿形设置,而仿形壳的背面则设置有动力固定座;指套作动机构的动力部分安装在动力固定座上;当待康复指关节进行康复运动时,指套作动机构位于手掌外侧。但其技术方案存在导致外骨骼手套具有质量大、能耗高、控制复杂且噪音高等缺点。
技术实现要素:
3.本发明所要解决的技术问题:目前缺乏重量轻且低噪音的手部康复设备的技术问题。提出了一种基于柔性驱动器的外骨骼康复手套及其交互方法。
4.解决上述技术问题,本发明采用如下技术方案:一种基于柔性驱动器的外骨骼康复手套,包括壳体、触摸屏、控制器、手背板、柔性驱动器、驱动绳和若干个指外骨骼,所述触摸屏固定安装在所述壳体上,所述壳体与手腕固定连接,所述控制器和柔性驱动器均安装在壳体内,所述手背板与所述壳体转动连接,所述指外骨骼安装在所述手背板上,所述驱动绳一端与指外骨骼连接,另一端与所述柔性驱动器连接,所述触摸屏和所述柔性驱动器均与控制器连接。
5.作为优选,所述外骨骼康复手套还包括张紧连杆组和滑轮组,所述指外骨骼的数量为五个,五个所述指外骨骼分别对应五个手指,所述张紧连杆组设置在驱动绳上,使驱动绳张紧,所述滑轮组转动安装在所述手背板上,所述滑轮组限制所述驱动绳的位置。
6.作为优选,所述指外骨骼还包括自适应装置,所述自适应装置包括接触滑轮、顶板、顶杆、固定壳、弹簧和滑柱,所述固定壳安装在所述手背板上,所述滑柱固定安装在所述固定壳底部,所述弹簧套在所述滑柱上,所述顶杆底部开有与所述滑柱匹配的孔,所述顶杆与所述滑柱滑动连接,所述顶板与顶杆固定连接,所述接触滑轮转动安装在所述顶板上。
7.作为优选,所述指外骨骼包括机架、固定脚、三角杆、两个横向三角杆、两个指尖连杆、指尖套、两个前被动杆、两个扭簧、两个后被动杆、滑动连杆、滑块和滑轨,所述驱动绳包括滑动驱动绳和弯指驱动绳,所述固定脚与手背板固定连接,所述机架与所述固定脚转动连接,所述三角杆包括两个三角板和横向连杆,所述横向连杆两端分别与两个所述三角板固定连接,所述横向连杆的长度与预设手指宽度匹配,所述三角板的三个角处分别加工有孔,两个所述三角板的孔位置相同,所述横向三角杆呈钝角三角板状,所述横向三角杆的三个角处分别加工有孔,两个所述三角板的第一个孔分别与两个横向三角杆最靠近后端的孔转动连接,靠近机架的所述三角板的第一个孔还与机架转动连接,靠近机架的所述三角板的第二个孔与滑动连杆前端转动连接,滑动连杆后端与滑块转动连接,所述滑块与滑动驱动绳固定连接,所述滑块与滑轨卡接,所述滑轨与手背板固定连接,远离机架的所述三角板的第二个孔安装有定滑轮,所述定滑轮边缘与弯指驱动绳固定连接,所述指尖连杆的两端分别与横向三角杆前端的孔和指尖套后端转动连接,所述指尖套后端两侧上部分别与两个前被动杆的一端转动连接,所述前被动杆的另一端与后被动杆转动连接,两个所述扭簧分别安装在前被动杆和后被动杆转动连接处,所述扭簧使所述前被动杆和后被动杆的夹角趋于增大,两个所述前被动杆中部均设置有分叉杆,所述分叉杆末端与所述横向三角杆中部的孔转动连接,后被动杆另一端与三角板第三个孔转动连接。
8.作为优选,所述指外骨骼还包括弯曲度传感器和若干个压力传感器,所述弯曲度传感器两端分别安装在所述前被动杆和后被动杆上,所述弯曲度传感器检测所述前被动杆和后被动杆之间的弯曲度,若干个所述压力传感器安装在指尖套前端,所述弯曲度传感器及压力传感器均与控制器连接。
9.作为优选,所述壳体包括上盖和下盖,所述外骨骼康复手套还包括电池,所述手背板与下盖转动连接,若干个所述柔性驱动器、控制器及电池均安装在下盖。
10.一种如前述的基于柔性驱动器的外骨骼康复手套的交互方法,包括以下步骤:通过触摸屏选择训练模式,所述训练模式包括握力训练、单指活动度训练、捏拉训练和拉伸训练;所述控制器根据选择的训练模式控制所述柔性驱动器收缩;所述控制器读取所述弯曲度传感器及压力传感器的检测值,判断训练动作是否完成;若未完成训练动作,则等待预设时长后再次读取所述弯曲度传感器及压力传感器的检测值;若已完成训练动作,则控制所述柔性驱动器复位,并将完成次数记录增加1;若完成次数记录达到训练模式预设值,则停止训练。
11.作为优选,所述握力训练的方法包括:所述控制器控制所述柔性驱动器收缩,带动手指弯曲;读取所述弯曲度传感器的检测值,若弯曲度超过预设阈值,则立即停止训练并发出报警,若弯曲度未超过预设阈值,则等待预设时长后再次读取所述弯曲度传感器的检测值;读取压力传感器的测得的抓握物品的力反馈值,若达到预设阈值,则所述柔性驱
动器保持位置;等待3秒后,所述柔性驱动器复位,所述指外骨骼在扭簧的作用下亦复位;周期性读取所述弯曲度传感器的检测值,当所述弯曲度传感器检测值为预设的复位值时,等待2秒,完成一次握力训练;每组握力训练需完成10次握力训练,组间休息1min,完成15组后握力训练结束。
12.作为优选,所述单指活动度训练的方法包括:所述控制器控制所述柔性驱动器收缩,带动手指弯曲;读取所述弯曲度传感器的检测值,若弯曲度达到预设的训练要求值,则保持3秒;而后所述柔性驱动器复位,周期性读取所述弯曲度传感器的检测值,当所述弯曲度传感器检测值为预设复位值时,完成一次单指活动度训练;每组单指活动度训练需完成10次单指活动度训练,组间休息1min,完成15组后单指活动度训练结束。
13.作为优选,所述捏拉训练的方法包括:所述控制器控制所述柔性驱动器收缩,带动手指弯曲;读取压力传感器的测得的捏拉物品的力反馈值,若达到预设阈值,则所述柔性驱动器保持位置;提示训练者抬起手腕,保持3秒;手腕复位,所述柔性驱动器复位;周期性读取所述弯曲度传感器的检测值,当所述弯曲度传感器检测值为预设复位值时,完成一次捏拉训练;每组捏拉训练需完成10次捏拉训练,组间休息1min,完成15组后捏拉训练结束。
14.作为优选,所述拉伸训练的方法包括:所述控制器控制所述柔性驱动器收缩,带动手指弯曲;读取弯曲度传感器的检测值,若达到预设阈值,则所述柔性驱动器保持位置;提示训练者缓慢拉动手臂,而后复位手臂,所述柔性驱动器复位;周期性读取所述弯曲度传感器的检测值,当所述弯曲度传感器检测值为预设复位值时,完成一次拉伸训练;每组拉伸训练需完成10次拉伸训练,组间休息1min,完成15组后拉伸训练结束。
15.本发明的有益技术效果包括:利用柔性驱动器进行驱动,使外骨骼康复手套具有质量小、控制简单及功耗低的特点;基于仿生原理设计的外骨骼连杆,不仅体积小、便于穿戴而且可进行多关节运动;同时通过设计自适应张紧机构,可以适应腕部的内屈和外伸动作,更贴合多样化的生活场景。
16.本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
附图说明
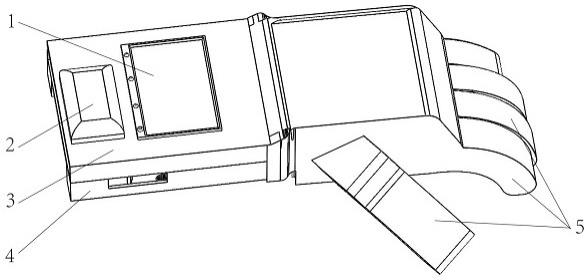
17.下面结合附图对本发明做进一步的说明:图1为本发明实施例外骨骼康复手套结构示意图。
18.图2为本发明实施例外骨骼康复手套使用示意图。
19.图3为本发明实施例外骨骼康复手套手背板结构示意图。
20.图4为本发明实施例外骨骼康复手套柔性驱动器安装示意图。
21.图5为本发明实施例外骨骼康复手套指外骨骼结构示意图。
22.图6为本发明实施例外骨骼康复手套指外骨骼侧视结构示意图。
23.图7为本发明实施例外骨骼康复手套自适应装置结构示意图。
24.图8为本发明实施例外骨骼康复手套进行握力训练方法流程图。
25.图9为本发明实施例外骨骼康复手套进行单指活动度训练方法流程图。
26.图10为本发明实施例外骨骼康复手套进行捏拉训练方法流程图。
27.图11为本发明实施例外骨骼康复手套进行拉伸训练方法流程图。
28.其中:其中:1、触摸屏,2、控制器,3、上盖,4、下盖,5、一体软套,7、手模,8、手背板,9、自适应装置,10、指外骨骼,11、柔性驱动器,12、张紧连杆组,13、电池,101、弯曲度传感器,102、机架,103、滑动连杆,104、滑块,105、滑动驱动绳,106、指尖连杆,107、横向三角杆,108、三角杆,109、固定脚,1010、滑轨,1011、弯指驱动绳,1012、指尖套,1013、前被动杆,1014、扭簧,1015、后被动杆,901、接触滑轮,902、顶板,903、顶杆,904、固定壳,905、弹簧,906、滑柱。
具体实施方式
29.下面结合本发明实施例的附图对本发明实施例的技术方案进行解释和说明,但下述实施例仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其他实施例,都属于本发明的保护范围。
30.在下文描述中,出现诸如术语“内”、“外”、“上”、“下”、“左”、“右”等指示方位或者位置关系仅是为了方便描述实施例和简化描述,而不是指示或暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
31.一种基于柔性驱动器11的外骨骼康复手套,请参阅附图1,包括壳体、触摸屏1、控制器2、手背板8、柔性驱动器11、驱动绳和若干个指外骨骼10,触摸屏1固定安装在壳体上,壳体与手腕固定连接,控制器2和柔性驱动器11均安装在壳体内,手背板8与壳体转动连接,指外骨骼10安装在手背板8上,驱动绳一端与指外骨骼10连接,另一端与柔性驱动器11连接,触摸屏1和柔性驱动器11均与控制器2连接。附图2中使用手模7展示了本实施例提供的外骨骼康复手套的使用方法,手背板8位于手背位置,手背板8及指外骨骼10上覆盖有一体软套5,壳体位于小手臂前端,壳体与小手臂固定,手指伸入指外骨骼10。
32.请参阅附图3,外骨骼康复手套还包括张紧连杆组12和滑轮组,指外骨骼10的数量为五个,五个指外骨骼10分别对应五个手指,张紧连杆组12设置在驱动绳上,使驱动绳张紧,滑轮组转动安装在手背板8上,滑轮组限制驱动绳的位置。外骨骼康复手套的指外骨骼10大小是根据成年人手的平均尺寸进行选定,最大程度的达到普适性,且每个关节都可达到30
°
以上的转动幅度,有较大的运动范围。利用自适应装置9和张紧连杆组12,可以适应手腕的内屈20
°
和外伸30
°
的转动幅度。保证患者在穿戴康复手套时能够的适应日常生活。本实施例所使用的柔性驱动器11采用基于电活性聚合物的柔性驱动器11,如pvc/cpvc凝胶驱动器及介电弹性体聚合物的柔性驱动器11。柔性驱动器11的尺寸为10x10x70mm, 的收缩行程约为7mm,即形变10%,柔性驱动器11复位时,通过扭簧1014实现指外骨骼10的复位。
33.请参阅附图4,壳体包括上盖3和下盖4,外骨骼康复手套还包括电池13,手背板8与
下盖4转动连接,若干个柔性驱动器11、控制器2及电池13均安装在下盖4。
34.请参阅附图5和附图6,指外骨骼10包括机架102、固定脚109、三角杆108、两个横向三角杆108107、两个指尖连杆106、指尖套1012、两个前被动杆1013、两个扭簧1014、两个后被动杆1015、滑动连杆103、滑块104和滑轨1010,驱动绳包括滑动驱动绳105和弯指驱动绳1011,固定脚109与手背板8固定连接,机架102与固定脚109转动连接,三角杆108包括两个三角板和横向连杆,横向连杆两端分别与两个三角板固定连接,横向连杆的长度与预设手指宽度匹配,三角板的三个角处分别加工有孔,两个三角板的孔位置相同,横向三角杆108107呈钝角三角板状,横向三角杆108107的三个角处分别加工有孔,两个三角板的第一个孔分别与两个横向三角杆108107最靠近后端的孔转动连接,靠近机架102的三角板的第一个孔还与机架102转动连接,靠近机架102的三角板的第二个孔与滑动连杆103前端转动连接,滑动连杆103后端与滑块104转动连接,滑块104与滑动驱动绳105固定连接,滑块104与滑轨1010卡接,滑轨1010与手背板8固定连接,远离机架102的三角板的第二个孔安装有定滑轮,定滑轮边缘与弯指驱动绳1011固定连接,指尖连杆106的两端分别与横向三角杆108107前端的孔和指尖套1012后端转动连接,指尖套1012后端两侧上部分别与两个前被动杆1013的一端转动连接,前被动杆1013的另一端与后被动杆1015转动连接,两个扭簧1014分别安装在前被动杆1013和后被动杆1015转动连接处,扭簧1014使前被动杆1013和后被动杆1015的夹角趋于增大,两个前被动杆1013中部均设置有分叉杆,分叉杆末端与横向三角杆108107中部的孔转动连接,后被动杆1015另一端与三角板第三个孔转动连接。
35.滑动驱动绳105绕在滑动连杆103末端,通过柔性驱动器11形变收缩向后拉动滑块104,滑动连杆103拉动三角杆108,使横向三角杆108107与三角杆108之间形成角度变化。弯指驱动绳1011拉动横向三角杆108107,进而带动指尖连杆106运动,并与横向三角杆108107形成弯曲,实现手指弯曲。柔性驱动器11复位,不再对滑块104施加拉力,指外骨骼10内部处于弯曲的的扭转弹簧905释放能量,使手指伸直。
36.指外骨骼10还包括弯曲度传感器101和若干个压力传感器,弯曲度传感器101两端分别安装在前被动杆1013和后被动杆1015上,弯曲度传感器101检测前被动杆1013和后被动杆1015之间的弯曲度,若干个压力传感器安装在指尖套1012前端,弯曲度传感器101及压力传感器均与控制器2连接。
37.请参阅附图7,指外骨骼10还包括自适应装置9,自适应装置9包括接触滑轮901、顶板902、顶杆903、固定壳904、弹簧905和滑柱906,固定壳904安装在手背板8上,滑柱906固定安装在固定壳904底部,弹簧905套在滑柱906上,顶杆903底部开有与滑柱906匹配的孔,顶杆903与滑柱906滑动连接,顶板902与顶杆903固定连接,接触滑轮901转动安装在顶板902上。当手腕内屈时,自适应张紧机构配合放线,使驱动绳的长度适应内屈动作。手腕外伸时,自适应张紧机构配合收线,使驱动绳的长度适应外伸动作。
38.一种如前述的基于柔性驱动器11的外骨骼康复手套的交互方法,包括以下步骤:通过触摸屏1选择训练模式,训练模式包括握力训练、单指活动度训练、捏拉训练和拉伸训练;控制器2根据选择的训练模式控制柔性驱动器11收缩;控制器2读取弯曲度传感器101及压力传感器的检测值,判断训练动作是否完成;若未完成训练动作,则等待预设时长后再次读取弯曲度传感器101及压力传感器的检测值;若已完成训练动作,则控制柔性驱动器11复位,并将完成次数记录增加1;若完成次数记录达到训练模式预设值,则停止训
练。
39.请参阅附图8,进行握力训练的方法包括:步骤a01)控制器2控制柔性驱动器11收缩,带动手指弯曲;步骤a02)读取弯曲度传感器101的检测值,若弯曲度超过预设阈值,则立即停止训练并发出报警,若弯曲度未超过预设阈值,则等待预设时长后再次读取弯曲度传感器101的检测值;步骤a03)读取压力传感器的测得的抓握物品的力反馈值,若达到预设阈值,则柔性驱动器11保持位置;步骤a04)等待3秒后,柔性驱动器11复位,指外骨骼10在扭簧1014的作用下亦复位;步骤a05)周期性读取弯曲度传感器101的检测值,当弯曲度传感器101检测值为预设的复位值时,等待2秒,完成一次握力训练;步骤a06)每组握力训练需完成10次握力训练,组间休息1min,完成15组后握力训练结束。
40.请参阅附图9,进行单指活动度训练的方法包括:步骤b01)控制器2控制柔性驱动器11收缩,带动手指弯曲;步骤b02)读取弯曲度传感器101的检测值,若弯曲度达到预设的训练要求值,则保持3秒;步骤b03)而后柔性驱动器11复位,周期性读取弯曲度传感器101的检测值,当弯曲度传感器101检测值为预设复位值时,完成一次单指活动度训练;步骤b04)每组单指活动度训练需完成10次单指活动度训练,组间休息1min,完成15组后单指活动度训练结束。
41.请参阅附图10,进行捏拉训练的方法包括:步骤c01)控制器2控制柔性驱动器11收缩,带动手指弯曲;步骤c02)读取压力传感器的测得的捏拉物品的力反馈值,若达到预设阈值,则柔性驱动器11保持位置;步骤c03)提示训练者抬起手腕,保持3秒;步骤c04)手腕复位,柔性驱动器11复位;步骤c05)周期性读取弯曲度传感器101的检测值,当弯曲度传感器101检测值为预设复位值时,完成一次捏拉训练;步骤c06)每组捏拉训练需完成10次捏拉训练,组间休息1min,完成15组后捏拉训练结束。
42.请参阅附图11,进行拉伸训练的方法包括:步骤d01)控制器2控制柔性驱动器11收缩,带动手指弯曲;步骤d02)读取弯曲度传感器的检测值,若达到预设阈值,则柔性驱动器11保持位置;步骤d03)提示训练者缓慢拉动手臂,而后复位手臂,柔性驱动器11复位;步骤d04)周期性读取弯曲度传感器101的检测值,当弯曲度传感器101检测值为预设复位值时,完成一次拉伸训练;
步骤d05)每组拉伸训练需完成10次拉伸训练,组间休息1min,完成15组后拉伸训练结束。
43.本实施例的有益技术效果包括:利用柔性驱动器11进行驱动,使外骨骼康复手套具有质量小、控制简单及功耗低的特点;基于仿生原理设计的外骨骼连杆,不仅体积小、便于穿戴而且可进行多关节运动;同时通过设计自适应张紧机构,可以适应腕部的内屈和外伸动作,更贴合多样化的生活场景。
44.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于附图和上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。