1.本发明涉及推土机技术领域,特别涉及一种通过激光控制平整度的推土机。
背景技术:
2.申请号为200810046921.6的中国专利公开了一种激光控制平整推土机,在推土机铲刀前上方设有激光信号接收器,推土机的驾驶室内设有激光控制器,激光信号发射器放置在施工现场适当的位置,三位四通电磁阀、阻尼阀和安全阀集成在集成阀块上,集成阀块及液压控制油路与推土机上的液压系统并联,该发明利用激光信号发射器在作业面上方一定高度形成一个高精度参照基准面,在推土机铲刀上安装配套的激光接收器,用于检测当前平整位置与参照基准面的位差信号,此位差信号经过控制器处理后,输出至改造后的推土机液压系统,控制推土机铲刀自动升降,实现推土机平整自动控制。
3.但是,上述专利的方案存在以下技术问题:1、激光信号接收器长时间暴露,容易沾染泥土和粉尘,影响信号精度;2、激光信号接收器的位置难以调节,不能适应复杂的作业场地,例如,作业场地中,推土机所在位置与激光发射器之间存在障碍物的情况下,障碍物会阻挡激光路径,使激光接收器无法正常接收信号。
技术实现要素:
4.本发明所要解决的技术问题是:如何改进推土机的结构,以解决背景技术所涉及的技术问题。
5.为了解决上述技术问题,本发明采用的技术方案为:一种通过激光控制平整度的推土机,包括:机架;铲刀本体,所述铲刀本体活动连接于机架的前部;铲刀调节油缸,所述铲刀调节油缸连接于机架与铲刀本体之间,用于调节铲刀本体的位移;还包括:支架,所述支架连接于所述铲刀本体的上部;激光接收组件,所述激光接收组件包括水平气缸、箱体、连接杆、激光接收器和加重块;所述水平气缸的缸体连接于支架,所述水平气缸的活塞杆的移动方向为朝向机架外侧;所述箱体连接于水平气缸的活塞杆,所述箱体的外侧设有开口;所述连接杆的一端通过第一转轴枢接于箱体内的上部,所述第一转轴的轴向为机架的前后方向;所述激光接收器的上端中部通过活动连接部活动连接于连接杆的另一端。
6.进一步,上述通过激光控制平整度的推土机结构中,所述激光接收组件的数量为2
个,2个所述激光接收组件呈左右对称分布。
7.进一步,上述通过激光控制平整度的推土机结构中,还包括箱门,所述箱门枢接于箱体的开口处的一侧棱。
8.进一步,上述通过激光控制平整度的推土机结构中,所述箱门与箱体的枢接处连接有扭转弹簧。
9.进一步,上述通过激光控制平整度的推土机结构中,所述箱体的上部的盖板为内低外高的斜板。
10.进一步,上述通过激光控制平整度的推土机结构中,还包括喷水头,所述喷水头固定于箱体内的前侧板上,所述喷水头朝向激光接收器的激光接收面。
11.进一步,上述通过激光控制平整度的推土机结构中,所述箱体的下部设有通孔。
12.进一步,上述通过激光控制平整度的推土机结构中,所述活动连接部包括第二转轴、球体和球壳;所述第二转轴通过第二枢接轴枢接于连接杆,所述第二转轴平行于第一转轴;所述球壳连接于第二转轴,所述球体连接于激光接收器上端中部,所述球体铰接于球壳。
13.进一步,上述通过激光控制平整度的推土机结构中,所述第二转轴连接有限位装置,所述限位装置用于限制球体和球壳的相对移动。
14.进一步,上述通过激光控制平整度的推土机结构中,所述限位装置包括限位气缸和限位件,所述限位气缸的缸体连接于第二转轴,所述球壳设有通孔,所述限位气缸的活塞杆穿设于所述通孔,所述限位件连接于限位气缸的活塞杆端部。
15.本发明的有益效果在于:通过改进激光接收组件中的水平气缸、箱体、连接杆及激光接收器的结构及其位置连接关系,在推土机停用时,连接杆和激光接收器可收纳于箱体内,避免受到雨水、尘土的侵蚀,当推土机需要进行平整度控制时,通过控制连接杆的摆动即可使激光接收器移出箱体;由于激光接收器和连接杆通过活动连接部进行活动连接,且在激光接收器的下部设置加重块,使得激光接收器在移动过程中,在加重块的重力作用下,始终保持竖直状态,从而保证找平的控制精度;本发明通过在铲刀上部通过支架连接水平气缸,通过水平气缸能够大幅度地调节箱体以及激光接收器的侧向位移,当作业场地中,推土机所在位置与激光发射器之间存在障碍物的情况下,可通过较大幅度地调节激光接收器的水平方向位移,使其绕开障碍物,从而接收到激光信号,从而在具有障碍物的复杂作业环境下,不再需要频繁移动激光发射器,并频繁校准,大大提升了作业效率。
附图说明
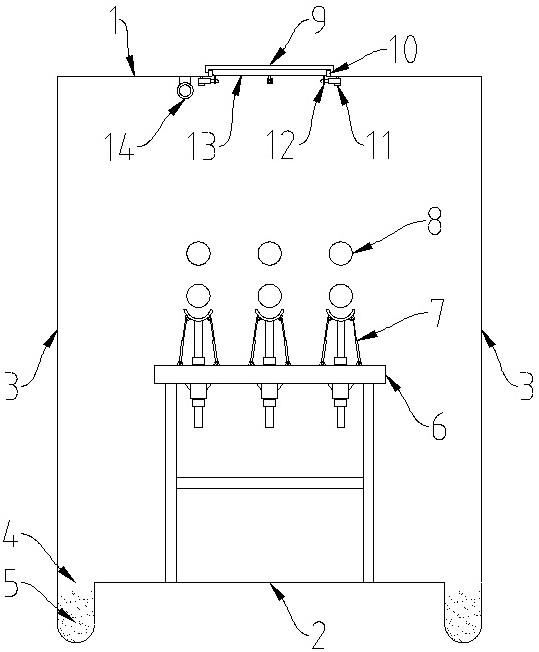
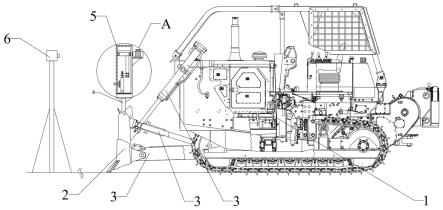
16.图1为本发明具体实施方式的一种通过激光控制平整度的推土机的侧视图;图2为图1的a部放大图;图3为本发明具体实施方式的一种通过激光控制平整度的推土机的局部结构在第一状态下的主视图;图4为本发明具体实施方式的一种通过激光控制平整度的推土机的局部结构在第二状态下的主视图;图5为图4的b部截面图;
标号说明:1、机架;2、铲刀本体;3、铲刀调节油缸;4、支架;5、激光接收组件;51、水平气缸;52、箱体;521、箱门;5211、磁铁;522、喷水头;53、连接杆;54、激光接收器;55、加重块;56、第一转轴;57、活动连接部;571、第二转轴;572、球体;573、球壳;58、限位装置;581、限位气缸;582、限位件;59、驱动电机;6、激光发射器。
具体实施方式
17.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
18.实施例1请参照图1至图5,本发明涉及一种通过激光控制平整度的推土机,包括:机架1;铲刀本体2,所述铲刀本体2活动连接于机架1的前部;所述铲刀调节油缸3,所述铲刀调节油缸3连接于机架1与铲刀本体2之间,用于调节铲刀本体2的位移;还包括:支架4,所述支架4连接于所述铲刀本体2的上部;激光接收组件5,所述激光接收组件5包括水平气缸51、箱体52、连接杆53、激光接收器54和加重块55;所述水平气缸51的缸体连接于支架4,所述水平气缸51的活塞杆的移动方向为朝向机架1外侧;所述箱体52连接于水平气缸51的活塞杆,所述箱体52的外侧设有开口;所述连接杆53的一端通过第一转轴56枢接于箱体52内的上部,所述第一转轴56的轴向为机架1的前后方向;所述激光接收器54的上端中部通过活动连接部57活动连接于连接杆53的另一端。
19.以上结构中,第一转轴56连接有驱动电机59,通过驱动电机59驱动第一转轴56转动,从而带动连接杆53沿第一转轴56转动;以上结构中,还包括控制器,所述控制器分别与激光接收器54、铲刀调节油缸3、水平气缸51、驱动电机59电连接,用户通过推土机的中控室能够直接控制铲刀调节油缸3、水平气缸51和驱动电机59;以上通过激光控制平整度的推土机的工作原理:在需要推土作业的场地预先架设好激光发射器6,使激光发射器6的发射方向为水平方向;控制水平气缸51移动,从而控制箱体52相对于机架1的水平位置;控制驱动电机59带动连接杆53沿第一转轴56转动,使激光接收器54沿第一转轴56
做弧线移动,从而使激光接收器54向外向上移动,通过激光接收器54的移动,使激光接收器54接收激光发射器6发射的激光信号,达到校准目的;控制推土机的机架1向前移动,移动过程中,激光接收器54接收激光发射器6发射的激光信号,激光接收器54将激光信号传递给控制器,控制器根据激光接收器54发送的激光信号输出相应的控制信号至铲刀调节油缸3,通过铲刀调节油缸3调节铲刀的移动。
20.本发明的主要改进点在于激光接收组件5中的水平气缸51、箱体52、连接杆53及激光接收器54的结构及其位置连接关系,请参照图3,在第一状态下,在推土机停用时,连接杆53和激光接收器54可收纳于箱体52内,避免受到雨水、尘土的侵蚀,当推土机需要进行平整度控制时,请参照图4,在第二状态下,通过控制连接杆53的摆动即可使激光接收器54移出箱体52;由于激光接收器54和连接杆53通过活动连接部57进行活动连接,且在激光接收器54的下部设置加重块55,使得激光接收器54在移动过程中,在加重块55的重力作用下,始终保持竖直状态,从而保证找平的控制精度;本发明通过在铲刀上部通过支架4连接水平气缸51,通过水平气缸51能够大幅度地调节箱体52以及激光接收器54的侧向位移,当作业场地中,推土机所在位置与激光发射器6之间存在障碍物的情况下,可通过较大幅度地调节激光接收器54的水平方向位移,使其绕开障碍物,从而接收到激光信号,从而在具有障碍物的复杂作业环境下,不再需要频繁移动激光发射器6,并频繁校准,大大提升了作业效率。
21.实施例2实施例1所述的通过激光控制平整度的推土机,其中,所述激光接收组件5的数量为2个,2个所述激光接收组件5呈左右对称分布。
22.以上结构中,2个所述激光接收组件5相互独立,可根据作业场地的地貌情况,灵活控制两个激光接收器54的位置,能够适应于多种、复杂的作业工况,例如当推土机铲刀需要进行斜坡的推土找平作业时,即铲刀倾斜时,同样能够调节两个激光接收器54至同一高度,由于两个激光接收器54的间距较远,通过两个激光接收器54接收激光信号以控制铲刀的位移,能够大大提升控制精度。
23.实施例3实施例1所述的通过激光控制平整度的推土机,其中,还包括箱门521,所述箱门521枢接于箱体52的开口处的一侧棱。
24.以上结构中,通过设置箱门521,使得当推土机停用时,激光接收器54能够收纳在相对密闭的箱体52内,进一步避免激光接收器54收到雨水和尘土的侵蚀。
25.实施例4实施例3所述的通过激光控制平整度的推土机,其中,所述箱门521与箱体52的枢接处连接有扭转弹簧。
26.以上结构中,扭转弹簧的作用是利用其弹性势能使激光接收器54收纳于箱体52内时,箱门521能够自动关闭,激光接收器54移出箱体52时,利用连接杆53可自动将箱门521顶开,不需要人为控制。
27.作为一种优选实施方式,还可在箱门521的另一侧以及箱体52的对应侧棱设置磁铁5211进行磁吸,使得当推土机停用时,激光接收器54能够收纳在相对密闭的箱体52内,进一步避免激光接收器54收到雨水和尘土的侵蚀。
28.实施例5
实施例1所述的通过激光控制平整度的推土机,其中,所述箱体52的上部的盖板为内低外高的斜板。
29.以上结构中,斜板的作用在于,第一,能够在箱体52的上表面形成斜坡,利于排水除尘,第二,在节省箱体52整体体积的前提下,使连接杆53能够具有更大的转动幅度,从而大大增加了激光接收器54的位移调节范围。
30.实施例6实施例1所述的通过激光控制平整度的推土机,其中,还包括喷水头,所述喷水头522固定于箱体52内的前侧板上,所述喷水头522朝向激光接收器54的激光接收面。
31.以上结构中,可对应在机架1上挂接水箱,水箱通过水管与喷水头522连接,并在水管连接小型水泵,当作业过程中,因雨水、尘土污染激光接收器54的接收面而导致激光接收器54的灵敏度下降时,可通过喷水头522向激光接收器54的接收面喷水,达到清洗目的。
32.作为进一步优选的技术方案,还可在机架1上挂接热风机,热风机通过管道与水管三通连接,喷水清洗完成时,可通过热风机通过喷水管通入热风,使喷水管以及箱体52内干燥的目的,避免水管、箱体52以及激光接收器54潮湿而滋生细菌以及腐蚀。
33.实施例7实施例6所述的通过激光控制平整度的推土机,其中,所述箱体52的下部设有通孔。
34.上述通孔用于喷水清洗的排水以及热风烘干的排气。
35.实施例8实施例1所述的通过激光控制平整度的推土机,其中,所述活动连接部57包括第二转轴571、球体572和球壳573;所述第二转轴571通过第二枢接轴枢接于连接杆53,所述第二转轴571平行于第一转轴56;所述球壳573连接于第二转轴571,所述球体572连接于激光接收器54上端中部,所述球体572铰接于球壳573。
36.以上结构中,第二转轴571与激光接收器54通过球铰连接,由于球铰连接具有很高的自由度,由于在铲刀调节油缸3的控制下,铲刀本体2的位移并非竖直方向移动,实际上是沿着其连接机架1上某一点为圆形的弧形移动,由于弧形的直径大,铲刀本体2的上下移动近似于竖直方向移动,然而铲刀本体2在上下移动过程中,具有轻微的前后位移,由于箱体52间接地固定连接于铲刀本体2,箱体52同样随铲刀本体2进行弧线移动,若仅靠第二转轴571的枢接配合加重块55的作用下,激光接收器54并非处于完全竖直状态,而通过增设球铰的结构,能够保证激光接收器54无论在何种位置状态下,均能处于竖直状态,从而进一步提高了激光信号接收以及控制的精度。
37.实施例9实施例8所述的通过激光控制平整度的推土机,其中,所述第二转轴571连接有限位装置58,所述限位装置58用于限制球体572和球壳573的相对移动。
38.以上结构中,当激光接收器54调整到位后,例如,在校准阶段,激光接收器54位置调整到位时,又例如,在铲刀位置调整到位时,通过限位装置58限制球体572和球壳573的相对移动,避免在推土机作业过程中,激光接收器54因发生晃动而影响信号接收及控制精度。
39.作为一种优选实施方式,所述限位装置58包括限位气缸581和限位件582,所述限位气缸581的缸体连接于第二转轴571,所述球壳573设有通孔,所述限位气缸581的活塞杆穿设于所述通孔,所述限位件582连接于限位气缸581的活塞杆端部,通过控制限位气缸581的移动,使限位件582接触球体572达到限制球体572和球壳573的相对移动的目的,优选的,所述限位件582可以是橡胶块。
40.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。