技术特征:
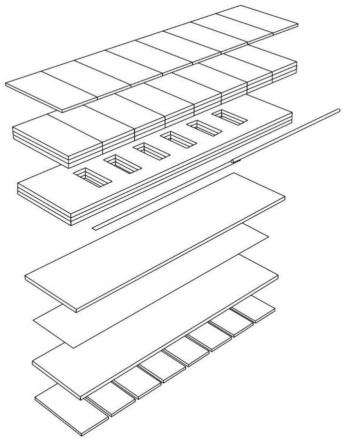
1.一种基于层叠技术的多材料气动软体机器人制造方法,其特征在于,包括:步骤s1:将软体机器人的三维模型根据需要进行切片分层;步骤s2:基于分层得到的每一层的二维图案,对材料进行加工,实现二维的结构;步骤s3:将加工完的材料进行层叠装配,完成多材料气动软体机器人的制造。2.根据权利要求1所述的基于层叠技术的多材料气动软体机器人制造方法,其特征在于,所述步骤s1中三维模型包括多种材料,所述多种材料包括多种弹性软材料和不可拉伸软材料。3.根据权利要求1所述的基于层叠技术的多材料气动软体机器人制造方法,其特征在于,所述步骤s2中对材料进行加工包括:基于分层得到的每一层的二维图案,对每一层对应的材料进行加工制造,形成二维平面的结构。4.根据权利要求1所述的基于层叠技术的多材料气动软体机器人制造方法,其特征在于,所述步骤s3包括:将激光切割加工完的每一层材料进行堆叠,从而形成三维的复杂结构。5.根据权利要求1所述的基于层叠技术的多材料气动软体机器人制造方法,其特征在于,所述软体机器人至少包括一个自由度。6.根据权利要求1所述的基于层叠技术的多材料气动软体机器人制造方法,其特征在于,所述气动软体机器人具有多种单自由度驱动模态,包括弯曲、伸长、收缩、扭转以及角度开关。7.根据权利要求1所述的基于层叠技术的多材料气动软体机器人制造方法,其特征在于,所述气动软体机器人与气源联通,每一个单一自由度独立控制,在压缩气体的充气作用下,产生驱动效果。8.一种基于层叠技术的多材料气动软体机器人制造系统,其特征在于,包括:模块m1:将软体机器人的三维模型按照需要进行切片分层;模块m2:基于分层得到的每一层的二维图案,对材料进行加工,实现二维的结构;模块m3:将加工完的材料进行层叠装配,完成多材料气动软体机器人的制造。9.根据权利要求8所述的基于层叠技术的多材料气动软体机器人制造系统,其特征在于,所述模块m1中三维模型包括多种材料,所述多种材料包括多种弹性软材料和不可拉伸软材料;所述模块m2中对材料进行加工包括:基于分层得到的每一层的二维图案,对每一层对应的材料进行加工制造,形成二维平面的结构。10.根据权利要求8所述的基于层叠技术的多材料气动软体机器人制造系统,其特征在于,所述模块m3包括:将激光切割加工完的每一层材料进行堆叠,从而形成三维的复杂结构。
技术总结
本发明提供了一种基于层叠技术的多材料气动软体机器人制造方法及系统,包括:步骤S1:将软体机器人的三维模型进行切片分层;步骤S2:基于分层得到的每一层的二维图案,对材料进行加工,实现二维的结构;步骤S3:将加工完的材料进行层叠装配,完成多材料气动软体机器人的制造。本发明制造方法简单,能够实现复杂三维结构的多材料气动软体机器人的制造,灵活性强,具有广泛的应用前景。具有广泛的应用前景。具有广泛的应用前景。
技术研发人员:邹江 谷国迎 罗驿驰
受保护的技术使用者:上海交通大学
技术研发日:2021.05.10
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。