1.本实用新型涉及油门控制技术领域,具体涉及一种油门踏板组件和车辆。
背景技术:
2.车辆在行驶中遇到危险需要刹车时,情急之下,有可能误将油门当成刹车踩下,新手司机则更容易出现此问题,可能造成严重的后果。
3.针对此问题,目前的解决方案主要是通过电子化的方式,主要有检测车辆前方的障碍物的距离,当距离很近时,则通过电子系统切断油泵供油,使得车辆的油门踩下时无加速效果。但目前的方式存在电子失效风险,有可能未切断供油,导致踩下踏板依然加速。
技术实现要素:
4.本实用新型的目的是提供一种油门踏板组件和车辆,解决目前的电子化方式失效导致的踩下踏板依然加速的问题。
5.为实现本实用新型的目的,本实用新型提供了如下的技术方案:
6.第一方面,本实用新型提供一种油门踏板组件,包括:底座;踏板,所述踏板的一端与所述底座转动连接;踏板撑杆,所述踏板撑杆的一端与所述踏板的下表面接触;旋转摆臂,所述旋转摆臂可转动的设置于所述底座上,所述旋转摆臂转动角的大小与油门大小正相关;安全控制件,所述安全控制件设置于所述旋转摆臂和所述踏板撑杆之间,所述安全控制件用于实现所述旋转摆臂和所述踏板撑杆的连接或分离;当所述安全控制件使所述旋转摆臂和所述踏板撑杆连接时,所述旋转摆臂在所述踏板撑杆的作用下转动;当所述安全控制件使所述旋转摆臂和所述踏板撑杆分离时,所述旋转摆臂无法在所述踏板撑杆的作用下转动。
7.一种实施方式中,所述安全控制件包括控制主体和伸缩杆,所述控制主体固定在所述旋转摆臂上,所述伸缩杆相对所述控制主体可伸缩设置;所述踏板撑杆上开设有容置槽,当所述伸缩杆嵌入所述容置槽时,所述旋转摆臂和所述踏板撑杆连接。
8.一种实施方式中,所述伸缩杆上朝向所述踏板撑杆的一端的横截面呈多边形或椭圆形,所述容置槽的形状与所述伸缩杆朝向所述踏板撑杆的一端的形状相匹配。
9.一种实施方式中,还包括复位件,所述复位件与所述底座和所述旋转摆臂连接,当所述旋转摆臂与所述踏板撑杆分离时,所述复位件推动所述旋转摆臂转动至初始位置。
10.一种实施方式中,所述油门踏板组件还包括位于所述底座和所述踏板之间的限位板,所述限位板与所述底座连接固定,并与所述底座共同围合形成容纳腔,所述旋转摆臂容置在所述容纳腔,所述旋转摆臂处于所述初始位置时,所述旋转摆臂与所述限位板背向所述踏板的表面紧贴。
11.一种实施方式中,所述踏板撑杆带动所述旋转摆臂转动的过程中,所述踏板撑杆与所述踏板的下表面相对滑动。
12.一种实施方式中,所述底座上设有导向槽,所述导向槽用于限定所述踏板撑杆相
对于所述底座的运动方向。
13.一种实施方式中,所述油门踏板组件还包括角度传感器,所述角度传感器用于检测所述旋转摆臂转动角的大小。
14.第二方面,本实用新型还提供一种车辆,包括第一方面各种实施方式中任一项所述的油门踏板组件。
15.一种实施方式中,所述车辆还包括整车控制器,所述整车控制器用于根据所述旋转摆臂的转动角大小调节油门的大小。
16.一种实施方式中,所述车辆还包括距离传感器,所述距离传感器用于检测车辆周围预设距离内的障碍物,并向所述整车控制器传输距离信号,所述整车控制器根据所述距离信号确定是否发出危险信号,所述安全控制件用于根据危险信号使所述旋转摆臂和所述踏板撑杆分离。
17.本实用新型的油门踏板组件,通过安全控制件实现旋转摆臂和踏板撑杆的连接或分离,既能在正常行驶时使得旋转摆臂与踏板撑杆连接,踩下踏板能够通过踏板撑杆带动旋转摆臂转动,旋转摆臂的转动角的大小与油门大小正相关,保证踏板能够控制油门,又能在遇到危险时使得旋转摆臂与踏板撑杆分离,踩下踏板不能通过踏板撑杆带动旋转摆臂旋转,不能控制油门,如此,即使将油门当成刹车踩下,也不会给油而加速,避免发生事故,相比于现有的电子方式,能显著提升可靠性。
附图说明
18.为了更清楚地说明本实用新型实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
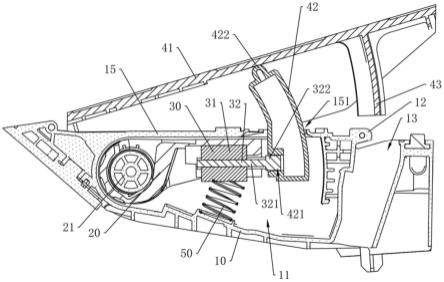
19.图1是一种实施例的油门踏板组件的示意图;
20.图2是一种实施例的油门踏板组件的其中一个状态的示意图;
21.图3是一种实施例的油门踏板组件的其中一个状态的示意图;
22.图4是一种实施例的车辆的示意图。
23.附图标记说明:
24.1000-车辆,100-油门踏板组件,110-距离传感器,120-整车控制器;
25.10-底座,11-容纳腔,12-定位件,13-放置槽,15-限位板,151-开口,20-旋转摆臂, 21-转动轴,30-安全控制件,31-控制主体,32-伸缩杆,321-伸缩部,322-卡接部,41-踏板,42-踏板撑杆,421-容置槽,422-接触头,43-导向件,50-复位件,60-角度传感器。
具体实施方式
26.下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
27.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上
或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。
28.除非另有定义,本实用新型所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本实用新型中在说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本实用新型所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
29.下面结合附图,对本实用新型的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
30.请参考图1和图4,本实用新型实施例提供一种油门踏板组件100,包括底座10、旋转摆臂20、安全控制件30、踏板41和踏板撑杆42。
31.底座10的形状和结构不做限制,其用作结构基础,其他各零部件安装在底座10上,底座10安装至车辆1000的底盘(图中未示出)。
32.旋转摆臂20一端与底座10转动连接。旋转摆臂20的形状和结构不做限制,其与底座 10的连接方式也不做限制。可选的,旋转摆臂20的一端穿设有一转动轴21,该转动轴21的两端与底座10连接,旋转摆臂20通过转动轴21的转动实现与底座10的相对转动。
33.踏板41的一端与底座10转动连接。踏板41大致呈板状,其一端与底座10的转动连接的方式不做限制,例如,可通过铰链连接两者实现转动连接。踏板41包括相背的上表面和下表面,上表面用于让用户踩踏,使得踏板41相对底座10转动。
34.踏板撑杆42的一端与踏板41的下表面接触。用户踩下踏板41时,踏板41带动踏板撑杆42朝向底座10的一侧(即朝下)移动。
35.安全控制件30设置于旋转摆臂20和踏板撑杆42之间,安全控制件30用于实现旋转摆臂20与踏板撑杆42的连接或分离。
36.当安全控制件30使旋转摆臂20和踏板撑杆42连接时,旋转摆臂20在踏板撑杆42的作用下转动。
37.当安全控制件30使旋转摆臂20和踏板撑杆42分离时,旋转摆臂20无法在踏板撑杆42 的作用下转动。
38.旋转摆臂20的转动角大小与油门大小相关。
39.其中,请结合图1和图4,车辆1000在行驶过程中,车辆1000上的距离传感器110会检测障碍物的距离,并将距离信号发给整车控制器120,整车控制器120根据距离的信号可判断车辆1000是否存在危险,并决定是否发送危险信号给油门踏板组件100。具体的,当判断车辆1000存在危险时,则发送危险信号给油门踏板组件100,当判断不存在危险时,则不发送危险信号给油门踏板组件100。
40.请结合图1、图2和图4,在油门踏板组件100未接收到危险信号的情况下,安全控制件30使得旋转摆臂20与踏板撑杆42连接,踏板41被踩下以带动踏板撑杆42朝下移动,踏板撑杆42带动旋转摆臂20转动,旋转摆臂20相对初始位置产生夹角,夹角的大小被调制以与油门的大小正相关。
41.具体的,在正常行驶过程中,油门踏板组件100未接收到危险信号,安全控制件30使得旋转摆臂20与踏板撑杆42连接,使得踩下踏板41时,踏板撑杆42带动旋转摆臂20转动,进而使得旋转摆臂20相对初始位置产生角度变化。当旋转摆臂20与初始位置的夹角为0
°
时,油门开度为0,不会给油。当旋转摆臂20相对初始位置产生角度变化时,该角度变化可以被调制为各种可行的控制信号以控制油门的大小。例如,该角度变化被调制为电压的大小,进行调制的器件可为安全控制件30、整车控制器120,也可为其他额外的器件,不做限制。将角度大小调制为电压大小后,将该电压信号输入控制油门开度的器件,如输入油泵,则油泵根据电压的大小控制油门的开度大小,即电压的大小与油门的开度大小正相关。如此,可实现旋转摆臂20相对初始位置的夹角越大,则电压越大,油门开度越大,夹角越小,电压越小,油门开度越小。总之,实现正常的驾驶操作。
42.请结合图3和图4,在油门踏板组件100接收到危险信号的情况下,安全控制件30使旋转摆臂20和踏板撑杆42分离,踩下踏板41时,踏板撑杆42并不会对旋转摆臂20施加力,踏板撑杆42不能带动旋转摆臂20转动,进而不会对油门形成控制。即使将踏板41踩到底,也不会给油而让车辆1000加速。
43.因此,本实用新型实施例的油门踏板组件100,通过安全控制件30实现旋转摆臂20和踏板撑杆42的连接或分离,既能在正常行驶时使得旋转摆臂20与踏板撑杆41连接,踩下踏板41能够通过踏板撑杆41带动旋转摆臂20转动,旋转摆臂20的转动角的大小与油门大小正相关,保证踏板41能够控制油门,又能在遇到危险时使得旋转摆臂20与踏板撑杆41分离,踩下踏板41不能通过踏板撑杆42带动旋转摆臂20旋转,不能控制油门,如此,即使将油门当成刹车踩下,也不会给油而加速,避免发生事故,相比于现有的电子方式,能显著提升可靠性。
44.可选的,请参考图1,安全控制件30包括控制主体31和伸缩杆32,控制主体31固定在旋转摆臂20上,伸缩杆32相对控制主体31可伸缩设置。踏板撑杆42开设容置槽421,当伸缩杆32嵌入容置槽421时,旋转摆臂20与踏板撑杆42连接。当伸缩杆32从容置槽421 退出时,旋转摆臂20与踏板撑杆42分离。
45.具体的,控制主体31固定在旋转摆臂20上,伸缩杆32自旋转摆臂20远离转动轴21的一端伸出。控制主体31可为任意可行的结构,不做限制,只要能够驱动伸缩杆32进行伸缩运动即可。例如,控制主体31中部开设有滑道(图中未标号),伸缩杆32与滑道相配合,在滑道内滑动。可选的,安全控制件30为电磁阀,控制主体31为电磁阀外壳,伸缩杆32为电磁阀棒心。
46.在正常行驶时,控制主体31控制伸缩杆32相对控制主体31伸出并伸入容置槽421,踏板撑杆42带动伸缩杆32转动,伸缩杆32带动控制主体31转动,进而带动旋转摆臂20转动,以正常控制油门。
47.在遇到危险时,控制主体31控制伸缩杆32缩回控制主体31,踏板撑杆42与伸缩杆32 分离,踏板撑杆42无法带动伸缩杆32转动,进而无法带动旋转摆臂20转动,无法控制油门。
48.可选的,请参考图1,油门踏板组件还包括复位件50,复位件50与底座10和旋转摆臂 20连接,当旋转摆臂20与踏板撑杆42分离时,复位件50推动旋转摆臂20转动至初始位置。其中,初始位置时油门开度为0,不给油,则发动机将停机。
49.在遇到危险时,伸缩杆32退出容置槽421而缩回控制主体31,踏板撑杆42与伸缩杆32 之间无连接关系,踩下踏板41,使得旋转摆臂20不会跟随转动,同时,由于复位件50的作用推动旋转摆臂20旋转返回初始位置,油门无开度,发动机停止工作,实现降速以紧急避
险。
50.可选的,复位件50的两端分别与底座10和旋转摆臂20连接,以弹性支撑旋转摆臂20。复位件50例如为弹簧,其始终为压缩状态,当从如图1所示的状态踩下踏板41且带动旋转摆臂20跟随转动时,复位件50进一步压缩,当松开踏板41,复位件50的弹力释放,可推动旋转摆臂20反向旋转。复位件50的一端与底座10连接,另一端与旋转摆臂20连接的方式不做限制,可为直接连接或间接连接,直接连接是指无中间件,间接连接是指有中间件,例如,间接连接的一种方式是复位件50与控制主体31连接,而控制主体31与旋转摆臂20 连接,控制主体31作为中间件。
51.一种实施例中,请参考图1,油门踏板组件100还包括限位板15。限位板15与底座10 连接固定,并共同围合形成容纳腔11。限位板15位于底座10和踏板41之间,旋转摆臂20 容置在容纳腔11。限位板15开设有与容纳腔11连通的开口151,踏板撑杆42至少部分通过在开口151伸入容纳腔11。
52.具体的,当车辆1000在水平面上时,限位板15也可大致在水平面上。限位板15可与底座10为卡接、螺接、焊接等任意可行的方式连接固定,限位板15也可与底座10为一体成型的一体式结构。限位板15上开设的开口151与踏板撑杆42的形状相对应,可选的,踏板撑杆42通过开口151伸入容纳腔11,且能够从开口151中退出;可选的,踏板撑杆42的中部的尺寸可略小于远离踏板41一端的端部的尺寸,使得踏板撑杆42的中部容置在开口151处,而远离踏板41一端的端部容置在容纳腔11,且不能从容纳腔11中经开口151而退出,即开口151可具有限位作用。
53.当踩下踏板41时,踏板撑杆42通过限位板15的开口151伸入容纳腔11,并与伸缩杆 32相配合而带动旋转摆臂20朝远离限位板15的一侧转动,从而使得旋转摆臂20相对初始位置产生夹角。当踏板41踩到底时,踏板41与限位板15接触,限位板15阻止踏板41继续沿原方向转动,起到限位作用。当松开踏板41而使得踏板撑杆42带动伸缩杆32回到初始位置,旋转摆臂20处于初始位置时,或者,伸缩杆32缩回控制主体31而与踏板撑杆42分离,复位件50推动旋转摆臂20返回初始位置时,限位板15能起到阻挡旋转摆臂20的作用,从而使得各零部件的运动受控。
54.可选的,请参考图1,旋转摆臂20处于初始位置时,旋转摆臂20与限位板15背向踏板 41的表面紧贴。如此,旋转摆臂20的两侧其中一侧被限位板15所限位,另一侧被复位件50 推动而限位,从而使得旋转摆臂20在此位置具有较强的稳定性,故将此位置设置为旋转摆臂 20的初始位置,油门开度大小为0,状态稳定,需要用力踩下踏板41才可改变此状态,可靠性好。
55.可选的,请参考图1,踏板撑杆42与踏板41滑动连接。具体的,踏板撑杆42可包括位于一端部的接触头422,接触头422呈圆弧的凸起状,接触头422的表面与踏板41的下表面接触。踏板撑杆42带动旋转摆臂20转动的过程中,接触头422与踏板41的下表面相对滑动。如图1所示,当踩下踏板41,踏板41顺时针转动,踏板撑杆42可相对踏板41从右向左滑动。限位板15上的开口151的侧壁对踏板撑杆42形成限位和导向作用,进而可带动伸缩杆 32也大致沿竖直方向向下移动,并带动旋转摆臂20转动。
56.一种实施例中,请参考图1至图3,伸缩杆32包括伸缩部321和卡接部322。伸缩部321 与控制主体31滑动连接,卡接部322连接在伸缩部321伸出控制主体31的一端,且卡接
部 322的径向尺寸大于伸缩部321的径向尺寸,容置槽421的尺寸与卡接部322的尺寸对应。
57.进一步地,伸缩杆32上朝向踏板撑杆42的一端的横截面呈非圆形,如多边形或椭圆形,容置槽421的形状与伸缩杆32朝向踏板撑杆42的一端的形状相匹配。例如,可将伸缩杆32 的卡接部322设置为棱柱状,即在卡接部322上设置有至少一条凸棱,容置槽421的形状卡接部322的形状项匹配,当卡接部322插入容置槽421时,通过棱柱状的卡接部322与容置槽421的配合,可以防止踏板撑杆42与伸缩杆32之间的相对转动。
58.可选的,伸缩部321呈直杆状,横截面为圆形,控制主体31开设的滑道的形状、尺寸与伸缩部321对应,伸缩部321与滑道的内壁紧贴,也即是控制主体31对伸缩部321形成了限位和导向作用。卡接部322的横截面的形状可为多边形或椭圆形,多边形可为正方形、长方形等,且容置槽421的形状与卡接部322的形状对匹配。卡接部322的径向尺寸比伸缩部321 更大些,即卡接部322突出于伸缩部321的外周表面,使得伸缩杆32缩回控制主体31时,卡接部322与控制主体31的外壁抵持而不能进入滑道内,形成限位作用。可以理解的是,伸缩部321和卡接部322的形状还可为其他任意可行的,其径向尺寸是代表当横截面是圆形时的径向尺寸,当横截面是非圆形时,与横截面是圆形时的径向尺寸相对应的宽度或厚度尺寸,直观表现为伸缩杆32的粗细程度。
59.可选地,底座10上设有导向槽(未图示),导向槽用于限定所述踏板撑杆42相对于底座 10的运动方向。在踏板41被踩下时,踏板41带动踏板撑杆42相对于底座10上的转动轴21 转动,设置导向槽可以进一步地限定踏板撑杆42的运动轨迹,防止踏板撑杆42跑偏。
60.可选的,请参考图1,踏板41还连接有导向件43,导向件43连接在踏板撑杆42背向踏板41的转动中心的一侧。导向件43的作用是为了对踏板41的转动进行导向,提升结构稳定性。在底座10上开设有放置槽13,放置槽13的侧壁上设置有定位件12,导向件43可容置于该放置槽13中,并与定位件12滑动连接。当踩下踏板41时,导向件43伸入放置槽13中,并与定位件12相对滑动。
61.一种实施例中,请参考图1和图4,油门踏板组件100还包括角度传感器60,角度传感器60用于检测旋转摆臂20转动角的大小。角度传感器60可为任意可行的检测角度的传感器,具体不做限制。当旋转摆臂20转动时,角度传感器60即可检测到旋转摆臂20转动角的大小。该角度传感器60可与其他结构集成,也可为独立的器件,不做限制。例如,角度传感器60 为霍尔传感器,对应的,控制主体31设置为磁性件,则霍尔传感器可根据磁场的变化而检测得到控制主体31的位置,进而得到旋转摆臂20的转动角的大小。具体控制、检测、传感等部分内容,均可参考现有技术中任意可行的方案,本实用新型均不做限制。
62.请参考图1至图4,本实用新型实施例还提供一种车辆1000,包括前述任一实施例的油门踏板组件100。该车辆1000可为小汽车、卡车、大巴车等,具体不做限制。
63.本实用新型实施例的车辆1000,通过采用本实用新型实施例的油门踏板组件100,通过安全控制件30实现旋转摆臂20和踏板撑杆42的连接或分离,既能在正常行驶时使得旋转摆臂20与踏板撑杆41连接,踩下踏板41能够通过踏板撑杆41带动旋转摆臂20转动,旋转摆臂20的转动角的大小与油门大小正相关,保证踏板41能够控制油门,又能在遇到危险时使得旋转摆臂20与踏板撑杆41分离,踩下踏板41不能通过踏板撑杆42带动旋转摆臂20旋转,不能控制油门,如此,即使将油门当成刹车踩下,也不会给油而加速,避免发生事故,相比于现有的电子方式,能显著提升可靠性。
64.一种实施例中,请参考图1和图4,车辆1000还包括整车控制器120,整车控制器120 用于根据旋转摆臂20的转动角大小调节油门的大小。具体内容可参考前述说明,此处不赘述。
65.一种实施例中,请参考图1和图4,车辆1000还包括距离传感器110,距离传感器110 用于检测车辆1000周围预设距离内的障碍物,并向整车控制器120传输距离信号,整车控制器120根据距离信号确定是否发出危险信号,整车控制器120还用于根据危险信号使旋转摆臂20和踏板撑杆42分离。
66.具体的,距离传感器110可为雷达,可设置在车辆1000的车头、车尾等处。当车辆1000 向前行驶时,车辆1000的车头处的距离传感器110检测到前方的障碍物的距离给整车控制器 120,整车控制器120判断间距小于安全距离时,发送危险信号给油门踏板组件100,油门踏板组件100的安全控制件30动作,伸缩杆32缩回控制主体31,使得踏板撑杆42与伸缩杆 32分离,踩下踏板41,不会对油门形成控制。当整车控制器120判断间距大于等于安全距离时,则不发送危险信号给油门踏板组件100,则油门踏板组件100正常工作。可以理解的是,当车辆1000倒车而向后行驶时,车辆1000的车尾处的距离传感器110也可检测后方的障碍物的距离,原理同上,不再赘述。可以理解的是,障碍物包括但不限于车辆、行人、牲畜、大石头等。
67.在本实用新型实施例的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指标的方位或位置关系为基于附图所述的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或原件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
68.以上所揭露的仅为本实用新型一种较佳实施例而已,当然不能以此来限定本实用新型之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本实用新型权利要求所作的等同变化,仍属于本实用新型所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
