1.本实用新型属于传输技术领域,尤其涉及一种运动系统及直线电机。
背景技术:
2.随着高精密运动控制技术的快速发展,能够实现直驱驱动的运动控制系统被广泛应用于各行各业。直驱式运动控制系统的核心零部件为直驱电机,即在电磁力的作用下,直接驱动负载,省去中间传动机构,从而可以实现更高的定位精度。采用多动子、动磁铁的只求电机,是未来直驱控制系统的发展趋势。
3.现有专利cn108328249公开了一种线性传输系统,其系统涉及一种动磁铁直线电机,该动磁铁直线电机为u型无铁芯电机结构,电机线圈进行了分层,实现更小的极距,但是电机磁钢与线圈的极槽数配合还是传统的配合方案,为为2τ/3电机,其中,τ为电机极距。现有专利cn112789794公开了一种用于用于识别线性传输系统的滑动件的方法,该专利中同样涉及一种动磁铁直线电机,且电机磁钢与线圈极槽数的配合采用5τ/3电机形式,其中,τ为电机极距。在专利cn103973194中,提出了一种动磁铁式直线电机的功率切换装置及方法,该专利中同样涉及动磁铁直线电机及控制方法,其中,电机为2τ/3电机,该专利中提到的电流切换方案存在一个较大的问题,当2组磁钢同时覆盖 u
1v1
w1u
2v2
w2,从位置1到位置2时,磁钢组件离开u1、进入u3时,但u3 线圈并未电流,会导致电机出力不稳定。
4.综上所述,在现有的长行程多动子线性传输系统中,电机磁钢与线圈的极槽数配合均采用传统的配合方案,从而在线圈在进行电流切换时,部分线圈并未覆盖磁钢但是有电流,导致发热增加,且空载反电动势和负载反电动势同时存在,影响线性传输系统的出力稳定性及运行可靠性;同时,在多动子同时运动时,多动子之间存在较大的运动死区,导致动子的行程受到影响。
技术实现要素:
5.本实用新型的目的在于提供一种运动系统及直线电机,以提高运动系统的出力稳定性,减小线圈发热,减少动子组件的运动死区。
6.为实现上述目的,本实用新型采用下述技术方案:
7.一种运动系统,包括:
8.支架;
9.定子组件,包括沿设定方向铺设在所述支架上的若干个线圈组,每个所述线圈组均包括沿所述设定方向依次排布的3k个线圈,相邻两个所述线圈中心的距离为τs,所述k为正整数;
10.动子组件,沿所述设定方向设置有多组,每组所述动子组件均包括动子座以及设置在所述动子座上的磁钢组,所述动子座能沿所述设定方向滑动地设置在所述支架上,每个所述磁钢组均包括沿所述设定方向依次设置的m n个磁钢,相邻两个所述磁钢的中心距为τ,所述τ和所述τs满足3kτs=mτ,所述m、所述 k及所述n均为大于或等于1的整数;
11.控制组件,与所述定子组件连接,并用于控制每个所述线圈的电流通断。
12.作为一种运动系统的可选技术方案,所述n等于1。
13.作为一种运动系统的可选技术方案,所述控制组件包括多个子驱动组件,每个子驱动组件均包括电性连接的驱动器和电流切换板,每个所述动子组件均分别对应一所述子驱动组件,每一所述子驱动组件的所述电流切换板均与每个所述线圈电性连接,每一所述子驱动组件的所述驱动器均能通过对应的所述电流切换板控制任一所述线圈的电流通断。
14.作为一种运动系统的可选技术方案,所述控制组件还包括:
15.电流检测模块,用于检测每个所述线圈的通电电流大小;
16.和/或,位置检测模块,用于检测每个所述动子组件相对所述定子组件的位置。
17.作为一种运动系统的可选技术方案,所述控制组件还包括上位控制机,所有所述驱动器均与所述上位控制机通讯连接。
18.作为一种运动系统的可选技术方案,每个所述动子组件均包括间隔设置的两个磁钢组,两个所述磁钢组分别位于所述定子组件的相对两侧,且每个所述磁钢组均包括沿所述设定方向排布的所述m n个磁钢,两个所述磁钢组的所述磁钢正对设置。
19.作为一种运动系统的可选技术方案,所述线圈为跑道型线圈;
20.和/或,所述磁钢的充磁方向为垂直于所述线圈的方向,且沿所述设定方向相邻的两个所述磁钢的充磁方向相反。
21.作为一种运动系统的可选技术方案,所述设定方向为直线方向或者环绕跑道型环的方向。
22.作为一种运动系统的可选技术方案,所述k=1,且所述m=2、4或5。
23.一种直线电机,包括如上所述的运动系统。
24.本实用新型的有益效果在于:
25.本实用新型提供的运动系统,通过设置磁钢组中的磁钢数量为m n,且相邻两个磁钢之间的中心距与相邻两个线圈之间的中心距满足3kτs=mτ,则可以保证动子组件不仅始终覆盖至少一个线圈组,且磁钢组还能够覆盖与该线圈组相邻且位于动子组件运动方向的前方的另一线圈组的部分线圈,从而在进行电流切换时,待断电线圈和待通电线圈均处于磁钢组的覆盖范围内,且当待断电线圈的中心与一磁钢中心正对时,待通电线圈的中心同时与另一磁钢中心正对,此时进行待断电线圈的断电及对待通电线圈通电,能够避免电流切换对系统的运动控制造成影响,保证电流切换的过程能够平稳、可靠地进行,提高电流切换的平稳性;同时,由于在电流切换时,待通电线圈和待断电线圈均被磁钢覆盖,能够降低电流切换时线圈的发热,避免空载反电动势和负载反电动势同时存在;再者,该种磁钢与线圈的配合形式,能够减小相邻两个动子组件能够达到的最小间距,从而减小动子组件的运动死区;最后,整个运动系统,从整个系统上来看,电机方案是长初级短次级的直线电机方案,但从电流切换的时机来看,电机方案又同时是一个长次级短初级的直线电机方案,保证了运动系统出力的稳定性。
26.本实施例提供的直线电机,通过采用上述的运动系统,能够降低直线电机的发热,提高直线电机的出力稳定性。
附图说明
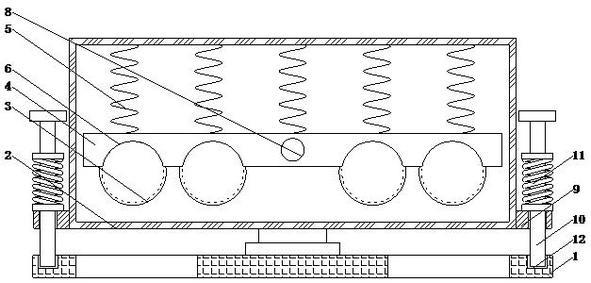
27.图1是本实用新型实施例一提供的运动系统的结构示意图;
28.图2是本实用新型实施例一提供的支架及导向组件的结构示意图;
29.图3是本实用新型实施例一提供的运动系统的部分结构示意图;
30.图4是本实用新型实施例一提供的动子组件及导向组件的结构示意图;
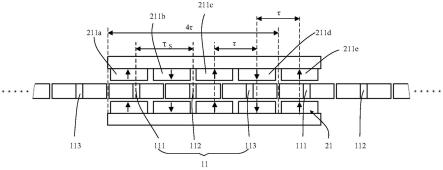
31.图5是本实用新型实施例一提供的线圈与磁钢配合的结构示意图;
32.图6是本实用新型实施例一提供的线圈进行电流切换的步骤示意图;
33.图7是本实用新型另一实施例提供的线圈与磁钢配合的结构示意图;
34.图8是本实用新型又一实施例提供的线圈与磁钢配合的结构示意图;
35.图9是本实用新型实施例一提供的两组动子组件与定子组件的配合结构示意图;
36.图10是本实用新型实施例一提供的控制关系示意图。
37.图中标记如下:
38.1、定子组件;11、线圈;11a、a相线圈;11b、b相线圈;11c、c相线圈; 12、包封层;
39.2、动子组件;21、磁钢组;211、磁钢;211a、第一磁钢;211b、第二磁钢; 211c、第三磁钢;211d、第四磁钢;211e、第五磁钢;22、动子座;221、背铁; 222、支撑块;
40.3、支架;31、安装座;31a、直线段;31b、圆弧段;311、内环板;312、外安装板;32、固定座;321、固定底板;322、支撑板;323、加强板;33、连接板;
41.4、导向组件;41、导轨;411、导向凸部;42、移动组件;421、滑座;422、导向滚轮;4221、凹槽;
42.5、子驱动组件;51、驱动器;52、电流切换板。
具体实施方式
43.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
44.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
45.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
46.在本实施例的描述中,术语“上”、“下”、“右”、等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此
外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
47.实施例一
48.如图1所示,本实施例提供了一种运动系统,运动系统包括支架1、定子组件1、动子组件2以及控制组件。其中,定子组件1包括沿设定方向铺设在支架 1上的若干个线圈组,每个线圈组均包括沿设定方向依次排布的3k个线圈11,相邻两个线圈11中心的距离为τs,k为正整数;动子组件2沿设定方向设置有多组,每组动子组件2均包括动子座22以及设置在动子座22上的磁钢组21,动子座22能沿设定方向滑动地设置在支架1上,每个磁钢组21均包括沿设定方向依次设置的(m n)个磁钢211,相邻两个磁钢211的中心距为τ,τ和τs满足3kτs=mτ,m、k及n均为大于或等于1的整数;控制组件,与定子组件1 连接,并用于控制每个线圈11的电流通断。
49.本实施例提供的运动系统,通过设置磁钢组21中的磁钢211数量为m n,且相邻两个磁钢211之间的中心距与相邻两个线圈11之间的中心距满足 3kτs=mτ,则可以保证动子组件2不仅始终覆盖至少一个线圈组,且磁钢组21 还能够覆盖与该线圈组相邻且位于动子组件2运动方向的前方的另一线圈组的部分线圈11,从而在进行电流切换时,待断电线圈11和待通电线圈11均处于磁钢组21的覆盖范围内,且当待断电线圈11的中心与一磁钢211中心正对时,待通电线圈11的中心同时与另一磁钢211中心正对,此时进行待断电线圈11 的断电及对待通电线圈11通电,能够避免电流切换对系统的运动控制造成影响,保证电流切换的过程能够平稳、可靠地进行,提高电流切换的平稳性;同时,由于在电流切换时,待通电线圈11和待断电线圈11均被磁钢211覆盖,能够降低电流切换时线圈11的发热,避免空载反电动势和负载反电动势同时存在;再者,该种磁钢211与线圈11的配合形式,能够减小相邻两个动子组件能够达到的最小间距,从而减小动子组件的运动死区;最后,整个运动系统,从整个系统上来看,电机方案是长初级短次级的直线电机方案,但从电流切换的时机来看,电机方案又同时是一个长次级短初级的直线电机方案,保证了运动系统出力的稳定性。
50.如图1和图2所示,支架1包括安装座31和固定座32,安装座31安装于固定座32上端,定子组件1及动子组件2均安装于安装座31上。在本实施了中,安装座31呈跑道环形,即安装座31包括相对且间隔设置的两个直线段31a 和连接于两个直线段31a的两端之间的圆弧段31b,圆弧段31b为四份之一圆弧,且圆弧段31b与直线段31a光滑过渡连接。设定方向为支架1的中心轨迹方向。该种支架1的结构设置,可以实现动子组件2的环形运动,扩大运动的范围。在其他实施例中,安装座31可以呈一字型结构,即设定方向为直线方向,此时,动子组件2带动负载沿直线运动。
51.安装座31优选包括呈环形的内环板311和连接于内环板311外侧的外安装板312,内环板311竖直设置,外安装板312水平设置且连接于内环板311的下端,由此能够更加方便动子组件2及定子组件1等在支架3上的安装。
52.两个直线段31a之间连接有连接板33,连接板33位于内环板311的内部,固定座32位于连接板33的下方并与连接板33可拆卸连接,连接板33可以沿直线段31a的延伸方向间隔设置有多个,且至少两端的连接板33对应设置有固定座32。连接板33的设置,能够提高安装座31在固定座32上的安装便利性,且能够有效避免固定座32与动子组件2相干涉。
53.在本实施例中,连接板33设置有两个,固定座32设置有一个,即中间的连接板33不与固定座32连接。在其他实施例中,连接板33也可以仅设置两个,固定座32与连接板33对应
设置。
54.固定座32包括水平设置的固定底板321以及竖直设置在固定底板321上的支撑板322,支撑板322的上端与连接板33连接。为增强固定座32的整体结构强度,固定座32还包括与支撑板322垂直连接的加强板323,加强板323优选相对支撑板322的延伸方向间隔设置有至少两组,且每组加强板322优选包括于设置于支撑板322相对两侧的两个加强板322,每个加强板322与支撑板 322及固定底板321均垂直连接。
55.线圈组包括若个11线圈和包裹于11线圈的包封层12,包封层12由环氧树脂灌封形成,并完全包裹线圈11。且线圈11通过灌封形成包封层12的同时固定于内环板311的上端。线圈组在安装座31上的固定和排布形式可以参考现有技术,此非本实用新型的改进重点,此处不再赘述。在本实施例中,线圈11 优选为跑道型线圈。
56.在本实施例中,每个线圈组包括三个线圈11,即k=1,三个线圈11的相位不同。将线圈组包含三个线圈11,可以简化控制组件对线圈11电的控制。在其他实施例中,每个线圈组还可以包括若干个子线圈组,每个子线圈组均包含一个w相线圈、一个v相线圈及一个u相线圈,且每个子线圈组中的相位排位顺序相同。
57.在本实施例中,以每个线圈组均包括沿设定方向排布的u相线圈11a、v相线圈11b及w相线圈11c为例,对线圈11与磁钢组21的配合及线圈11的电流切换进行介绍,但是可以理解的是,u相线圈11a、v相线圈11b及w相线圈11c的排布的顺序也可以与本实施例所示的顺序不相同。
58.如图4和图5所示,为提高驱动力,优选地,每个动子组件2均包括间隔设置的两个磁钢组21,两个磁钢组21分别位于定子组件1的相对两侧,且每个磁钢组21均包括沿设定方向排布的m n个磁钢211,同一动子组件2上的两个磁钢组21上的磁钢211一一正对设置。同一磁钢组21中,相邻两个磁钢211 的充磁方向相反。同一个动子组件2中,相对设置的两个磁钢211的充磁方向相同。在本实施例中,磁钢211充磁方向为垂直于线圈组的方向。可以理解的是,在其他实施例中,每个动子组件2也可以仅设置一个磁钢组21。
59.进一步地,动子组件2还包括动子座22,磁钢组21安装于动子座22上,且动子座22与支架1滑动连接。动子座22包括相对且间隔设置的两个背铁221 以及连接于两个背铁221之间的支撑块222,即支撑块222与两个背铁221相连形成u型结构。背铁221由导磁材料制成,且每个背铁221朝向另一背铁221 的一面设置有磁钢组21。
60.背铁221与支撑块222的连接方式优选为螺纹连接,以增强连接稳定性。在其他实施例中,也可以是支撑块222的两侧相对设置两个支板,每个支板的内侧粘接背铁221。磁钢211在背铁221上的连接优选为粘接,避免螺钉等的设置对磁场造成影响。
61.为保证动子组件2沿设定方向运动,运动系统还包括导向组件4,导向组件优选4采用滚动导向,以降低因导向产生的摩擦,减小运动系统的发热,提高动子组件2的运动速度。
62.导向组件4优选包括导轨41及移动组件42,导轨41安装于安装座31上,移动组件42与动子组件2一一设置并相连。在本实施例中,导轨41安装于外安装板312上表面并与内环板311间隔设置,移动组件42安装于动子座22的底部,并与导轨41滚动配合。
63.进一步地,移动组件42包括导向滚轮422及导向座421,导向座421安装于动子座22的下方,导向滚轮422安装于导向座421的下方且于导轨41的相对两侧各设置至少一个,导轨41的相对两侧分别与两侧的导向滚轮422滚动配合。该种设置,可以使得导轨41夹设在两
侧的导向滚轮422之间,避免动子组件2在运动过程中在运动方向的法相方向上产生晃动,提高动子组件2的运动平稳性。
64.进一步地,导向滚轮422的周向侧壁上开设有环形的凹槽4221,导轨41的相对两侧均凸出有导向凸部411,导向凸部411插入对应侧的导向滚轮422的凹槽4221中,并与凹槽4221的槽壁面接触。该种设置,通过将导向凸部411 插入凹槽4221中,能够限制导向滚轮422与导轨41在上下方向上的相对位置,从而进一步地避免动子组件2在运动过程中产生上下位移或者偏转,进一步提高动子组件2的运动可靠性。
65.在本实施例中,凹槽4221的横截面为开口朝向导轨41的v型,导向凸部 411同样为v型结构。但可以理解的是,本实施例并不限于此,凹槽4221的横截面还可以为圆弧面或者其他形状,且凹槽4221的横截面形状与导向凸部411 的形状相一致。
66.为简化运动系统的控制,降低运动系统的成本,优选地,n=1,即相比于传统磁钢211数与线圈11数的配比关系,本实施例中,在一个线圈组中线圈11 数确定的情况下,在满足传统直线电机极槽数配合关系式3kτs=mτ的m个磁钢 211的基础上,增加一个磁钢211。该种设置,使得在电流切换中,刚好磁钢组 21两端的两个磁钢211与同相的两个线圈11中心分别对齐。即在任意时刻,磁钢组21两端的两个磁钢211分别覆盖待通电磁钢211和待断电磁钢211,在满足电流稳定切换的同时,也避免了磁钢211覆盖其他未通电磁钢211导致的磁力浪费及磁钢211设置成本增加的问题。
67.如图6所示及表1所示,在本实施例中,以磁钢211与线圈11满足的极槽配合为例,对运动系统的线圈电流切换进行介绍。如当前通电线圈组为第一线圈组,与第一线圈组相邻且位于第一线圈组前方的线圈组为第二线圈组。覆盖当前第一线圈组的五个磁钢211沿动子组件2的运动方向分别为第一磁钢 211a、第二磁钢211b、第三磁钢211c、第四磁钢211d及第五磁钢211e。
68.如图6(a)所示,当第一线圈组中的u相线圈11a的边缘与第一磁钢211a 边缘对齐时,且第一线圈组中的三个线圈11及第二线圈组中的u相线圈11a均被磁钢组21覆盖,第一线圈组中的三个线圈11均处于通电状态。
69.当动子组件2运动至图6(b)所示位置时,第一线圈组中的u相线圈11a 的中心与第一磁钢211a中心正对,第二线圈组的u相线圈11a的中心与第五磁钢211e的中心正对,此时,可以对第一线圈组中的u相线圈11a进行断电,对第二线圈组的u相线圈11a进行通电,即完成一个u相电流的切换。
70.如图6(c)所示,当动子组件2继续运动至第一线圈组的v相线圈11b与第一磁钢211a中心正对时,第五磁钢211e与第二线圈组的v相线圈11b中心正对,此时可对第一线圈组的v相线圈11b进行断电,对第二线圈组的v相线圈11b,则完成v相电流的切换。
71.如图6(d)所示,当动子组件2继续运动至第一线圈组的w相线圈11c与第一磁钢211a中心正对时,第五磁钢211e与第二线圈组的w相线圈11c中心正对,此时可对第一线圈组的w相线圈11c进行断电,对第二线圈组的w相线圈11c进行通电,则完成w相电流的切换。
72.当动子组件2继续运动时,则循环进行图6(a)~图6(d)的步骤,即进行u相电流、v相电流及w相电流的循环切换。可以理解的是,上述各相电流的切换顺序仅为示例,本实用新型对此不做限制。
73.表1、运动系统的电流切换表
[0074][0075][0076]
可以理解的是,在其他实施例中,如图7和图8所示,磁钢211与线圈11 的配置也可以是满足其他极槽配合关系,如或等配合关系,且不同极槽配合关系下的电流切换原理与上述的极槽配合关系下的切换原理相同,本实用新型不再一一例举。
[0077]
如图7所示,当3k小于m时,单个磁钢211的宽度小于单个线圈11的宽度,由此在进行电流切换时,待通电线圈11未完全被磁钢211覆盖,由此,在本实施例中,两组动子组件2能够达到的最小间隙可以为而传统电机的相邻两个动子之间的最小间距为τ,从而可以有效缩短两个动子组件2之间的最小间距,避免动子组件2之间出现运动死区的问题。
[0078]
如图10所示,控制组件用于控制动子组件2运动以及控制线圈11进行电流切换。优选地,控制组件包括多个子驱动组件5,每个子驱动组件5均包括电性连接的驱动器51和电流切换板52,每个动子组件2均分别对应一子驱动组件5,每一子驱动组件5的电流切换板52均与每个线圈11电性连接,每一子驱动组件5的驱动器51均能通过对应的电流切换板52控制任一线圈11的电流通断。该种设置,使得每个子驱动组件5均能单独控制每一线圈11的电流通断,保证了动子组件2可以运动到线圈11覆盖的任意位置;同时,由于子驱动组件5与动子组件2一一对应,不仅使得每个动子组件2单独可控,还能够有效减少驱动器51的个数,降低成本。
[0079]
为精准把握电流切换的时机,控制组件优选还包括电流检测模块和/或位置检测模块,其中电流检测模块用于检测每个线圈11的通电电流大小,位置检测模块用于检测每个动子组件2相对定子组件1的位置。通过对线圈11电流和/ 或动子组件2位置的检测,能够准确判定是否存在线圈11的中心与磁钢211中心正对,从而判定是否需要进行线圈11的电流切换。
[0080]
在本实施例中,控制组件同时包括电流检测模块与位置检测模块,能够提高检测精度,还能够避免某一检测模块故障或者检测错误导致的切换故障问题。
[0081]
电流检测模块包括电流传感器、信号放大电路和a/d转换电路,电流传感器与三相线缆以及信号放大电路和a/d转换电路相连,信号放大电路和a/d转换电路与控制模块相连。电流传感器分别对三相线缆的其中两相电流进行检测,而另一相电流则通过被测的两相电流相加获得。电流传感器经信号放大电路和 a/d转换电路将电流信号传递至控制模块,控制模块对每一相的零电流进行标定,并对每相电流进行实时检测。
[0082]
电流检测模块检测的电流信息传递至驱动器51,电流切换板52在驱动器 51的驱动,根据下位置检测模块检测的位置信号以及电流检测模块检测的电流大小确定换相位置,从而控制对应换相位置处的线圈11的通断。
[0083]
控制组件优选还包括上位控制机,所有驱动器51均与上位控制机通讯连接,以使上位控制机能够统一控制各个驱动器51,协调各个动子组件2的运动,避免的各动子组件之间的相互干扰。上位控制机与驱动器51的通讯连接可以为有线通讯,也可以采用无线通讯。
[0084]
本实施例还提供了一种直线电机,包括上述的运动系统。通过采用上述的运动系统,能够降低直线电机的发热,提高直线电机的出力稳定性。
[0085]
实施例二
[0086]
本实施例提供了一种运动系统的线圈电流切换方法,以实现实施例一中的运动系统的电流切换。
[0087]
本实施例提供的线圈电流切换方法包括:
[0088]
对于任一动子组件2,当检测到被动子组件2覆盖的当前通电线圈组中存在一通电线圈11满足断电条件,且位于当前通电线圈组前方的相邻一组线圈组中存在一待通电线圈11满足通电条件时,则对该通电线圈11进行断电,对该待通电线圈11进行通电。
[0089]
其中,断电条件为:该通电线圈11的通电电流为零,和/或,该通电线圈11 的中心与一磁钢211中心正对。通电条件为:该待通电线圈11与通电线圈11 同相且该待通电线圈11的中心与一磁钢211中心正对。
[0090]
本实施例提供的电流切换方法,由于在进行电流切换前,待通电线圈11及待断电线圈11均位于动子组件2的覆盖范围内,由此使得在进行电流后的瞬间,刚通电的线圈11也处于磁钢211覆盖范围内,从而能够有效避免传统直线电机在电流切换后瞬间刚通电线圈11未被磁钢211覆盖导致的发热大、空载反电动势和负载反电动势同时存在的问题,确保了运动系统的出力稳定性。
[0091]
由于每个动子组件2均对应设置一子驱动组件5,因此,在本实施例中,控制方法还包括:对任一动子组件2,与该动子组件2对应的驱动器51控制被动子组件2覆盖的满足断电条件的通电线圈11的断电以及满足通电条件的待通电线圈11的通电。
[0092]
注意,上述仅为本实用新型的较佳实施例及所运用技术原理。本领域技术人员会理解,本实用新型不限于这里的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本实用新型的保护范围。因此,虽然通过以上实施例对本实用新型进行了较为详细的说明,但是本实用新型不仅仅限于以上实施例,在不脱离本实用新型构思的情况下,还可以包括更多其他等效实施例,而本实用新型的范围由所附的权利要求范围决定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。