一种基于3d结构光相机的汽车智能座舱曲面屏扫描装置
技术领域
1.本实用新型属于汽车电子电控技术领域,涉及一种基于3d结构光相机的汽车智能座舱曲面屏扫描装置。
背景技术:
2.传统车载显示屏主要指中控大屏、组合仪表,一般是直屏,其自动化测试系统采用高清工业相机确定2d坐标系即可。
3.新型智能座舱车载显示屏为了凸显科技感采用曲面屏设计,要实现其自动化测试,需对其先进行3d扫描,再进行2d和3d坐标的转换。车载显示屏属于玻璃面具有反光性,需考虑成像质量。
4.随着汽车智能化、电动化、网联化的发展,汽车智能座舱现阶段发展成为业内热点,车载显示屏的应用越来越多,有中控娱乐大屏、液晶仪表、hud、后排娱乐大屏、副驾娱乐大屏等。软件定义汽车时代,采用敏捷开发技术,只有高效的自动化测试系统才能适应快速迭代的软件开发策略。传统车载显示屏都是直屏设计,座舱自动化测试系统采用高清工业相机确定二维坐标。新型智能座舱的显示屏是曲面屏设计,是三维坐标,传统工业高清相机无法实现曲面屏的3d扫描。
5.cn 214149175 u一种轮胎3d扫描设备本实用新型公开了一种轮胎3d扫描设备,包括扫描平台和工业计算机,扫描平台的中部固设有用于支撑轮胎并驱使轮胎旋转的自动转毂,扫描平台的一端设有第一扫描模块,用于扫描轮胎胎面。扫描平台于自动转毂的两侧分别设有第二扫描模块,用于扫描轮胎侧面。第一扫描模块和第二扫描模块均控制连接有采集同步控制器,采集同步控制器与工业计算机通信连接。扫描平台与第二扫描模块之间设有调节装置,以调节初始扫描中心点。相比于现有技术,本实用新型可以同时扫描轮胎胎面和轮胎侧面,综合检查轮胎的磨损情况,使得用户清晰地认识到轮胎上存在的问题,为轮胎的进一步处理提供直观的理论依据。
6.cn 215390925 u一种鞋底检测扫描装置本实用新型涉及鞋底的自动化检测领域,具体涉及一种鞋底检测扫描装置。包括导流平台、视觉传感器、鞋底翻转装置,输送线和分拣机构;所述视觉传感器由支架固定,设置在导流平台的尾端;所述鞋底翻转装置连接导流平台,输送线连接鞋底翻转装置和分拣机构。本实用新型通过视觉传感器检测能够对鞋底上下面进行快速、完整的2d与3d扫描、检验,当鞋底在相机下传送过去,能自动检测出鞋底外形尺寸及外观瑕疵等信息。
7.cn 113920921 a led显示屏扫描方法、装置、终端及存储介质,本技术提供led显示屏扫描方法、装置、终端及存储介质,包括在对led显示屏进行画面更新的过程中按照预设的乱序扫描方式进行多行扫描;其中,所述预设的乱序扫描方式包括相邻行扫描的扫描顺序为互为相反的亮度由弱到强或者亮度由强到弱的顺序。与顺序扫描导致格栅现象所不同的是,乱序扫描后将亮度较高的行与亮度较低的行叠加在一起,例如将亮度最高的行与亮度最低的行叠加在一起,将亮度次高的行与亮度次低的行叠加在一起,以此类推。在将亮
度较高的行与亮度较低的行叠加在一起后,每一对叠加组合的亮度叠加近似相等,这样能使整个画面的亮度均衡,使人眼不会察觉到格栅现象。
8.专利cn 214149175 u是一种轮胎扫描设备,专利cn 113920921 a写的是led显示屏的乱序扫描法,与本技术不重叠。上述专利文献与本技术相关度较低。
技术实现要素:
9.本实用新型所要解决的技术问题是克服了现有技术存在的曲面屏自动化测试系统中曲面屏三维坐标确定问题,提供了一种基于3d结构光相机的汽车智能座舱曲面屏扫描装置。
10.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
11.为解决上述技术问题,本实用新型是采用如下技术方案实现的:
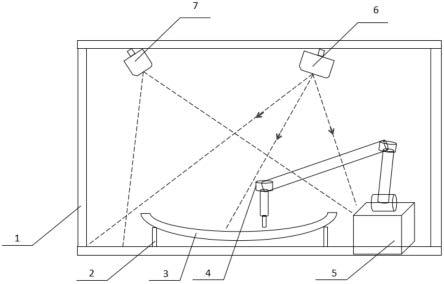
12.一种基于3d结构光相机的汽车智能座舱曲面屏扫描装置,包括:测试暗箱1、异形屏3、3d结构光相机7、投影仪6。
13.所述3d结构光相机7和投影仪6以一定角度固定在测试暗箱1顶部中间部分,使二者视场重合部分最大化;二者视场重合部分覆盖在异形屏3上方。
14.进一地,还包括2d高清工业相机4,所述2d高清工业相机4用于测试过程中拍摄曲面异形屏3的平面图像,曲面异形屏3的2d坐标和获取的3d坐标相互映射,实现机械臂点击、滑屏、拖拽操作,进行智能座舱曲面异形屏3自动化测试。
15.进一步地,还包括工装夹具2;工装夹具2用于固定异形屏3;所述工装夹具2安装在测试暗箱1底部。
16.进一步地,还包括机械臂5;
17.所述机械臂5固定在异形屏3一侧。
18.进一步地,所述2d高清工业相机4固定在机械臂5上。
19.进一步地,所述工装夹具2通过滑轨和升降装置调节异形屏3的位置和高度,使曲面异形屏3位于3d结构光相机7的视场内。
20.进一步地,对3d结构光相机7、投影仪6、异形屏3、2d高清工业相机4和机械臂5进行标定。
21.进一步地,标定完成后,投影仪6将光线投射到被测异形屏3表面,再通过3d结构光相机7拍摄光线受曲面异形屏3调制的畸变程度,得到高精度的3d点云数据。
22.进一步地,所述测试暗箱1高度是1米。
23.进一步地,在测试暗箱内顶部安装可移动滑轨,滑轨上安装3d线激光相机替代3d结构光相机7
24.与现有技术相比本实用新型的有益效果是:
25.本实用新型采用3d结构光相机实现座舱自动化测试系统中异形屏的3d扫描,3d结
构光相机成像速度快,且2d和3d数据可同时采集,测试效率高。测试箱封闭环境使3d结构光相机不受环境光影响,3d扫描成像效果较好。
附图说明
26.下面结合附图对本实用新型作进一步的说明:
27.图1是一种基于3d结构光相机的汽车智能座舱曲面屏扫描装置整体结构图;
28.图中:
29.1、测试暗箱;2、工装夹具;3、异形屏;4、2d高清工业相机;5、机械臂;6、投影仪;7、3d结构光相机。
具体实施方式
30.为使本实用新型实施的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。下面结合附图对本实用新型的实施例进行详细说明。
31.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。
32.下面结合附图对本实用新型作详细的描述:
33.本实用新型采用3d结构光相机对座舱曲面屏进行3d扫描,进行3d和2d坐标的映射,实现智能座舱曲面屏的自动化测试。
34.本装置包括测试暗箱1、工装夹具2、异形屏3、2d高清工业相机4、机械臂5、3d结构光相机7、投影仪6。系统整体结构图如图1所示。
35.3d结构光相机7和投影仪6以一定角度固定在测试暗箱1顶部中间部分,使二者视场重合部分最大化;
36.测试暗箱1底部安装的工装夹具2用于固定异形屏3,工装夹具2通过滑轨和升降装置调节异形屏3的位置和高度,使曲面异形屏3位于3d结构光相机7的视场内。
37.系统的标定,包括3d结构光相机7和投影仪6参数的标定,以及异形屏3、2d高清工业相机4和机械臂5的标定。标定后,相机、机械臂和异形屏建立空间坐标对应关系。
38.系统的标定,是现有技术。
39.测试工位是指异形屏3。
40.机械臂是指六自由度机械臂。
41.系统标定完成后,投影仪6将光线投射到被测异形屏3表面,再通过3d结构光相机7拍摄光线受曲面异形屏3调制的畸变程度,基于事先编码规则进行解码,得到高精度的3d点
云数据。
42.3d结构光相机3d扫描技术是现有技术。
43.得到高精度的3d点云数据,是异形屏上每一点的3d坐标(x、y、z坐标),具体算法是成熟技术。得到屏的三维坐标后与测试过程中的2d相机的二维坐标相映射。
44.机械臂5上固定一个2d高清工业相机4,用于测试过程中拍摄曲面异形屏3的平面图像,曲面异形屏3的2d坐标和获取的3d坐标相互映射,实现机械臂点击、滑屏、拖拽等操作,进行智能座舱曲面异形屏3自动化测试。
45.知道曲面屏上每一点的坐标,上位机控制机械臂的的运行轨迹,对曲面屏进行点击、滑屏等操作,实现对曲面屏的的自动化测试。
46.3d结构光相机有视场区域,本装置测试箱高度是固定1米,被测异形屏长度不确定,为了使异形屏在3d结构光相机的视场内,使用工装夹具调节异形屏的水平和高度位置。
47.智能座舱自动化测试系统中曲面屏的3d扫描,可以通过在测试箱内顶部安装可移动滑轨,滑轨上安装3d线激光相机来实现。3d线激光相机动态扫描,成像视野不受安装高度影响,镜面成像效果好,可是3d成像速度慢,且只能输出3d信息。本实用新型中3d结构光相机成像速度快,2d和3d数据可同时采集,测试箱高度可以满足3d成像视野,测试箱封闭环境保证成像质量不受环境光影响,故所选3d结构光相机方案具有自动化程度高、测试效率高、成像效果好的优点。
48.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本实用新型的保护范围之内。同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。