1.本实用新型涉及复位电路技术领域,特别指一种基于看门狗的联合复位装置。
背景技术:
2.复位电路用于电路系统出现异常时,对电路系统进行全局或者局部的复位,以使电路系统恢复正常的工作状态。由于电路系统的工作环境差异很大,特别是工业控制领域或者汽车领域,工作环境常常十分恶劣,在这些恶劣的工作环境下,一个可靠的复位电路显得尤为重要。
3.传统上存在如下三种复位电路:
4.其一:rc复位电路,该电路只能保证上电阶段的复位,且易被干扰,如果上电初始阶段电压不稳定,会出现反复的复位或复位不彻底的现象。
5.其二:电源监控复位芯片,此类芯片能在上电之初监控电源状态,在电源上升到可靠值之前,电路都处于复位状态,并且复位时间往往延长几十到一百多毫秒,相比于rc复位电路的可靠性更高,但此类芯片无法在主控芯片出现异常时触发复位。
6.其三:集手动复位、电源检测复位、硬件看门狗复位于一体的看门狗芯片,这类芯片能保证上电阶段的可靠复位,也能在主控芯片出现异常(比如程序跑飞)时触发看门狗溢出复位,但在主控芯片下载固件的过程中,主控芯片无法给看门狗芯片输出喂狗信号,此时发生溢出复位,便打断了下载进程造成下载失败,严重的甚至会造成主控芯片永久锁死(比如dsp芯片)。
7.因此,如何提供一种基于看门狗的联合复位装置,实现提升复位的可靠性,成为一个亟待解决的技术问题。
技术实现要素:
8.本实用新型要解决的技术问题,在于提供一种基于看门狗的联合复位装置,实现提升复位的可靠性。
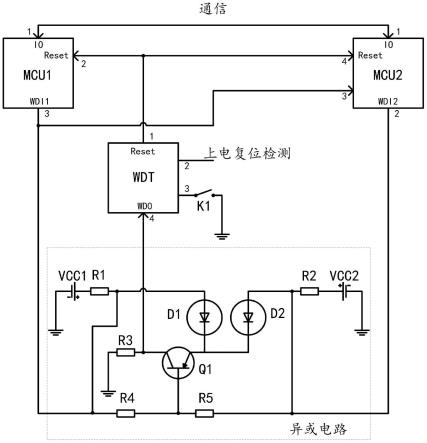
9.本实用新型提供了一种基于看门狗的联合复位装置,包括一微控制器mcu1、一微控制器mcu2、一看门狗芯片wdt、一异或电路以及一开关k1;
10.所述微控制器mcu1的引脚1与微控制器mcu2的引脚1连接,引脚2与看门狗芯片wdt的引脚1连接,引脚3与微控制器mcu2的引脚3以及异或电路连接;所述微控制器mcu2的引脚2与异或电路连接,引脚4与看门狗芯片wdt的引脚1连接;所述开关k1的一端与看门狗芯片wdt的引脚3连接,另一端接地;所述看门狗芯片wdt的引脚4与异或电路连接。
11.进一步地,所述异或电路包括一二极管d1、一二极管d2、一三极管q1、一电阻r1、一电阻r2、一电阻r3、一电阻r4、一电阻r5、一电源vcc1以及一电源vcc2;
12.所述电源vcc1的正极与电阻r1连接,负极接地;所述二极管d1的输入端与电阻r1、电阻r4以及微控制器mcu1的引脚3连接,输出端与三极管q1的发射极连接;所述电源vcc2的正极与电阻r2连接,负极接地;所述二极管d2的输入端与电阻r2、电阻r5以及微控制器mcu2
的引脚2连接,输出端与三极管q1的发射极连接;
13.所述电阻r3的一端与三极管q1的集电极以及看门狗芯片wdt的引脚4连接,另一端接地;所述三极管q1的基极与电阻r4以及电阻r5连接。
14.进一步地,所述三极管q1为pnp型。
15.本实用新型的优点在于:
16.通过设置微控制器mcu1、微控制器mcu2、看门狗芯片wdt、异或电路以及开关k1,微控制器mcu1的第一喂狗波形wdi1同时输出到异或电路和微控制器mcu2,微控制器mcu1的引脚1与微控制器mcu2的引脚1通信连接,看门狗芯片wdt的引脚1分别与微控制器mcu1的引脚2以及微控制器mcu2的引脚4连接;初始工作状态下微控制器mcu1拥有喂狗权限,微控制器mcu1和微控制器mcu2分别向异或电路输出方波和低电平,进而使异或电路向看门狗芯片wdt输出方波的喂狗信号wd0,当微控制器mcu1下载固件时无法输出方波,微控制器mcu2接过喂狗权限输出方波,使得喂狗信号wd0还是方波,进而让复位装置保持当前工作状态;当微控制器mcu1检测到微控制器mcu2的通信异常时自动输出低电平,或者微控制器mcu1以及微控制器mcu2均产生异常时,使得喂狗信号wd0为低电平自动触发复位操作,也可通过开关k1手动触发复位操作,复位操作过程中门狗芯片wdt通过引脚2对上电复位信号进行检测以判断是否退出复位状态;即集成了硬件看门狗复位、手动复位以及电源检测复位(上电复位信号),且在微控制器mcu1下载固件时不会触发复位而导致升级失败,进而极大的提升了复位装置复位的可靠性。
附图说明
17.下面参照附图结合实施例对本实用新型作进一步的说明。
18.图1是本实用新型一种基于看门狗的联合复位装置的电路图。
19.图2是本实用新型工作原理的流程图。
20.图3是本实用新型初始工作状态的波形示意图。
21.图4是本实用新型mcu2接管喂狗权限的波形示意图。
22.图5是本实用新型mcu1和mcu2同时喂狗的波形示意图。
23.图6是本实用新型异常状态的波形示意图。
具体实施方式
24.本技术实施例中的技术方案,总体思路如下:设置异或电路对微控制器mcu1和微控制器mcu2输出的喂狗波形进行异或得到喂狗信号wd0,当微控制器mcu1因下载固件无法输出方波时,微控制器mcu2接过喂狗权限输出方波,使喂狗信号wd0维持方波,避免因微控制器mcu1因下载固件而导致复位,以提升复位的可靠性。
25.请参照图1至图6所示,本实用新型一种基于看门狗的联合复位装置的较佳实施例,包括一微控制器mcu1、一微控制器mcu2、一看门狗芯片wdt、一异或电路以及一开关k1;
26.所述微控制器mcu1自带现有的看门狗软件,用于向所述微控制器mcu2以及异或电路输出波形为高电平、低电平或者方波的第一喂狗波形wdi1,并与所述微控制器mcu2进行通信,在具体实施时,只要从现有技术中选择能实现此功能的微控制器即可,并不限于何种型号,例如dsp、arm等自带看门狗软件的微控制器,且控制程序是本领域技术人员所熟知
的,这是本领域技术人员不需要付出创造性劳动即可获得的;所述微控制器mcu2用于向异或电路输出波形为高电平、低电平或者方波的第二喂狗波形wdi2,并与所述微控制器mcu1进行通信,在具体实施时,只要从现有技术中选择能实现此功能的微控制器即可,并不限于何种型号,例如cpld、fpga等无自带看门狗软件的微控制器,且控制程序是本领域技术人员所熟知的,这是本领域技术人员不需要付出创造性劳动即可获得的;所述看门狗芯片wdt是集手工复位、电源检测复位以及看门狗复位于一体的看门狗芯片,在具体实施时,只要从现有技术中选择能实现此功能的看门狗芯片即可,并不限于何种型号,且控制程序是本领域技术人员所熟知的,这是本领域技术人员不需要付出创造性劳动即可获得的;所述异或电路用于对微控制器mcu1和微控制器mcu2输出的信号进行异或;所述开关k1用于手动触发看门狗芯片wdt的复位操作。
27.所述微控制器mcu1的引脚1与微控制器mcu2的引脚1连接,引脚2与看门狗芯片wdt的引脚1连接,引脚3与微控制器mcu2的引脚3以及异或电路连接;所述微控制器mcu2的引脚2与异或电路连接,引脚4与看门狗芯片wdt的引脚1连接;所述开关k1的一端与看门狗芯片wdt的引脚3连接,另一端接地;所述看门狗芯片wdt的引脚4与异或电路连接。
28.所述异或电路包括一二极管d1、一二极管d2、一三极管q1、一电阻r1、一电阻r2、一电阻r3、一电阻r4、一电阻r5、一电源vcc1以及一电源vcc2;
29.所述电源vcc1的正极与电阻r1连接,负极接地;所述二极管d1的输入端与电阻r1、电阻r4以及微控制器mcu1的引脚3连接,输出端与三极管q1的发射极连接;所述电源vcc2的正极与电阻r2连接,负极接地;所述二极管d2的输入端与电阻r2、电阻r5以及微控制器mcu2的引脚2连接,输出端与三极管q1的发射极连接;
30.所述电阻r3的一端与三极管q1的集电极以及看门狗芯片wdt的引脚4连接,另一端接地;所述三极管q1的基极与电阻r4以及电阻r5连接。
31.所述三极管q1为pnp型。
32.本实用新型的工作原理包括如下步骤:
33.步骤s10、微控制器mcu1向异或电路输入第一喂狗波形wdi1,微控制器mcu2向异或电路输入第二喂狗波形wdi2;
34.步骤s20、异或电路基于所述第一喂狗波形wdi1以及第二喂狗波形wdi2生成喂狗信号wd0,并将所述喂狗信号wd0输入看门狗芯片wdt;
35.步骤s30、看门狗芯片wdt基于所述喂狗信号wd0、开关k1的触发信号以及上电复位信号执行复位操作;所述喂狗信号wd0为上升沿或者下降沿有效。
36.所述步骤s10中,所述第一喂狗波形wdi1以及第二喂狗波形wdi2均为高电平、低电平或者方波;所述第一喂狗波形wdi1和第二喂狗波形wdi2的方波的频率不同。
37.所述步骤s20中,所述喂狗信号wd0为第一喂狗波形wdi1与第二喂狗波形wdi2进行异或后的波形信号。
38.所述步骤s30具体包括:
39.步骤s31、初始工作状态下,第一喂狗波形wdi1为方波、第二喂狗波形wdi2为低电平,喂狗信号wd0为方波,不执行复位操作,如图3所示;
40.步骤s32、微控制器mcu2检测到第一喂狗波形wdi1不为方波时(恒定为0、恒定为1或者恒定为高阻状),向看门狗芯片wdt输出方波的第二喂狗波形wdi2,进而使异或电路输
出方波的喂狗信号wd0,不执行复位操作,如图4所示;
41.微控制器mcu2对第一喂狗波形wdi1进行持续检测,检测到第一喂狗波形wdi1为方波时,方波频率不同的第一喂狗波形wdi1和第二喂狗波形wdi2输入异或电路,进而使异或电路输出方波的喂狗信号wd0,不执行复位操作,如图5所示;
42.例如微控制器mcu1下载固件时无法输出方波,固件下载完成后继续输出方波;当微控制器mcu1出现异常而无法输出方波,自带的看门狗软件触发复位重启后继续输出方波;
43.微控制器mcu2输出低电平的第二喂狗波形wdi2,恢复至初始工作状态,如图3所示;
44.步骤s33、当微控制器mcu1检测到微控制器mcu2的通信异常时,输出低电平的第一喂狗波形wdi1,低电平的第一喂狗波形wdi1和第二喂狗波形wdi2输入异或电路,进而使异或电路输出低电平的喂狗信号wd0,执行复位操作,如图6所示;
45.由于微控制器mcu2无自带看门狗软件,当出现异常时无法自行进行复位,因此微控制器mcu1与微控制器mcu2进行通信对其进行检测,检测到通信异常时通过看门狗芯片wdt对微控制器mcu2进行复位;
46.步骤s34、当微控制器mcu1以及微控制器mcu2均产生异常时,看门狗芯片wdt在预设的第一时长内检测不到喂狗信号wd0,自动执行复位操作,如图6所示;
47.步骤s35、看门狗芯片wdt基于开关k1的触发信号,自动执行复位操作;
48.所述步骤s32、步骤s33、步骤s34以及步骤s35不分先后顺序。
49.所述步骤s30中,执行复位操作时,看门狗芯片wdt通过引脚2检测上电复位信号的电压值是否达到预设的电压阈值并持续预设的第二时长,若是,则退出复位状态;若否,则维持复位状态。即等电源处于稳定状态才退出复位状态,进一步提升复位可靠性。
50.所述步骤s10中,微控制器mcu1自带看门狗软件,微控制器mcu2无自带看门狗软件。即微控制器mcu1异常时可自行进行复位,微控制器mcu2异常时,需要由微控制器mcu1向看门狗芯片wdt发送信号以对微控制器mcu2进行复位。
51.综上所述,本实用新型的优点在于:
52.通过设置微控制器mcu1、微控制器mcu2、看门狗芯片wdt、异或电路以及开关k1,微控制器mcu1的第一喂狗波形wdi1同时输出到异或电路和微控制器mcu2,微控制器mcu1的引脚1与微控制器mcu2的引脚1通信连接,看门狗芯片wdt的引脚1分别与微控制器mcu1的引脚2以及微控制器mcu2的引脚4连接;初始工作状态下微控制器mcu1拥有喂狗权限,微控制器mcu1和微控制器mcu2分别向异或电路输出方波和低电平,进而使异或电路向看门狗芯片wdt输出方波的喂狗信号wd0,当微控制器mcu1下载固件时无法输出方波,微控制器mcu2接过喂狗权限输出方波,使得喂狗信号wd0还是方波,进而让复位装置保持当前工作状态;当微控制器mcu1检测到微控制器mcu2的通信异常时自动输出低电平,或者微控制器mcu1以及微控制器mcu2均产生异常时,使得喂狗信号wd0为低电平自动触发复位操作,也可通过开关k1手动触发复位操作,复位操作过程中门狗芯片wdt通过引脚2对上电复位信号进行检测以判断是否退出复位状态;即集成了硬件看门狗复位、手动复位以及电源检测复位(上电复位信号),且在微控制器mcu1下载固件时不会触发复位而导致升级失败,进而极大的提升了复位装置复位的可靠性。
53.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。