1.本发明属于垃圾回收领域,涉及物联网技术,具体是一种基于物联网传感器使用的定点垃圾装卸料车。
背景技术:
2.垃圾车主要用于市政环卫及大型厂矿运输各种垃圾,尤其适用于运输小区生活垃圾,并可将装入的垃圾压缩、压碎,使其密度增大,体积缩小,大大地提高了垃圾收集和运输的效率。新型垃圾车具有质量可靠,故障率低,维护方便,运行费用低等特点。
3.现有的垃圾车通常只具有一个垃圾回收仓,无法对不同种类的垃圾进行分类回收,同时,随着垃圾分类的普及,现有的垃圾车不具备对垃圾种类进行识别并自动回收的功能,并且由于无法自动进行回收,也导致也在垃圾回收时需要将垃圾储藏箱的箱门打开,垃圾回收的过程中会散发大量的臭气,影响操作人员以及行人的身体健康。
4.针对上述技术问题,本技术提出一种解决方案。
技术实现要素:
5.本发明的目的在于提供一种基于物联网传感器使用的定点垃圾装卸料车,用于解决现有的垃圾车无法对垃圾种类进行识别并自动回收的问题;
6.本发明需要解决的技术问题为:如何提供一种可以对垃圾种类进行识别并自动回收的垃圾装卸料车。
7.本发明的目的可以通过以下技术方案实现:
8.一种基于物联网传感器使用的定点垃圾装卸料车,包括车体,所述车体的两个侧面分别固定安装有安装板与集尘仓,所述安装板的底部设置有集尘机构,所述集尘仓的顶部固定安装有垃圾收集箱,所述集尘仓的底部固定连通有出尘管;
9.车体的内部还设置有处理器,所述处理器通信连接有采集模块、回收分析模块、控制器以及存储模块;
10.所述采集模块包括射频扫描仪,射频扫描仪用于对垃圾箱上的标签进行扫描,扫描成功后将扫描信息发送至回收分析模块,扫描信息包括垃圾桶编号、扫描时间以及垃圾种类;
11.回收分析模块接收到扫描信息后通过垃圾种类生成对应的控制信号并发送至控制器,控制器接收到控制信号后控制对应的电动推杆伸出进行垃圾回收,对垃圾进行回收分析。
12.作为本发明的一种优选实施方式,所述垃圾收集箱的顶面与底面之间固定安装有两个相对称的隔板,两个隔板将垃圾收集箱的内部分割为三个收集空间,每个收集空间的顶面与底面之间均固定安装有挡板,挡板将收集空间分割为储蓄空间与抽料空间,所述挡板贯穿连通有抽料管,所述抽料管位于储蓄空间一端的底部固定连通有下料管,所述抽料管位于抽料空间一端的中部设置有物料泵。
13.作为本发明的一种优选实施方式,所述垃圾收集箱远离车体的侧面固定安装有动力箱,所述动力箱的内顶壁固定安装有三个均匀分布的电动推杆,三个电动推杆与三个抽料管一一对应,所述电动推杆输出端固定安装有连接板,所述动力箱与垃圾收集箱相靠近的侧面均开设有开口,所述连接板靠近垃圾收集箱的一端穿过开口并固定安装有限位套,所述限位套的内圈之间固定安装有吸料管,所述吸料管顶部与抽料管的底部之间设置有软管,所述吸料管的底部穿过垃圾收集箱的内底壁并延伸至垃圾收集箱的外部,所述限位套与连接板相远离的侧面均固定安装有滑块,两个所述滑块相远离的侧面均活动连接有滑轨,两个所述滑轨的侧面分别与挡板、动力箱的内侧面固定连接。
14.作为本发明的一种优选实施方式,所述集尘机构包括固定安装在安装板底部的支架,所述支架底部固定安装有安装框,所述安装框的前后内壁之间活动连接有转杆,所述转杆的外表面固定安装有转辊,所述转辊的外表面设有均匀分布的清扫刷,所述转杆的前端穿过安装框的内壁并延伸至安装框的外部,所述安装框的正面设置有传动组件,安装框靠近车体的一端固定连通有集尘管,所述集尘管远离安装框的一端与集尘仓相连通,集尘管靠近安装框的一端还设置有压力泵。
15.作为本发明的一种优选实施方式,传动组件包括主动轮、从动轮以及驱动马达,驱动马达输出端固定安装有转轴,转轴后端与安装框的正面活动连接,主动轮、从动轮分别固定安装在转轴、转杆的外表面,主动轮与从动轮之间还传动连接有传动皮带。
16.作为本发明的一种优选实施方式,对垃圾进行回收分析的具体过程包括:将扫描时间标记为当次时间,将垃圾桶编号发送至存储模块并获取对应垃圾桶上一次进行扫描的时间并标记为上次时间,将当次时间与上次时间的差值标记为间隔时长,通过存储模块获取到间隔阈值,将间隔时长与间隔阈值进行比较:
17.若间隔时长小于间隔阈值,则判定对应垃圾桶的垃圾回收及时性合格,回收分析模块向处理器发送回收及时信号,处理器接收到回收及时信号后将回收及时信号发送至管理人员的手机终端;
18.若间隔时长大于等于间隔阈值,则判定对应垃圾桶的垃圾回收及时性不合格,回收分析模块向处理器发送回收不及时信号,处理器接收到回收不及时信号后将回收不及时信号发送至管理人员的手机终端。
19.作为本发明的一种优选实施方式,该基于物联网传感器使用的定点垃圾装卸料车的工作方法,包括以下步骤:
20.步骤一:将车体运行至垃圾桶处,并将吸料管置于垃圾桶的正上方,通过射频扫描仪对垃圾箱上的标签进行扫描并将扫描信息发送至回收分析模块;
21.步骤二:回收分析模块接收到扫描信息后对垃圾桶内的垃圾种类进行识别,通过识别结果控制对应的电动推杆伸出,通过电动推杆推动连接板下移,连接板下移的过程中带动吸料管下移,开启吸料管的电磁阀,然后通过控制器启动物料泵将垃圾桶中的垃圾通过吸料管与抽料管抽入到对应的储藏空间当中进行暂时存储;
22.步骤三:垃圾回收完成后控制电动推杆收缩,电动推杆带动连接板上移,连接板上移的同时带动吸料管上移,同时关闭吸料管的电磁阀,启动车体向下一垃圾回收处行进,直至所有垃圾桶内的垃圾均完成回收;
23.步骤四:在将垃圾回收仓内的垃圾卸出时,控制吸料管与下料管的电磁阀打开,关
闭抽料管的电磁阀,同时启动物料泵将储蓄空间内的垃圾通过下料管、抽料管以及下料管排出,完成垃圾装车、卸车的整个过程。
24.本发明具备下述有益效果:
25.1、通过集尘机构可以在垃圾车在行进过程中对路边的灰尘进行自动回收,驱动马达通过传动组件带动转辊转动,转辊将车体行进方向上的垃圾、灰尘进行清扫,并通过压力泵将清扫出的垃圾、灰尘抽入集尘箱内进行存储,在卸车时再将集尘箱内的垃圾、灰尘通过出尘管排出,实现一车多用的功能;
26.2、通过隔板将垃圾收集箱的内部空间分割为三个收集空间,三个收集空间可用于存储不同类型的垃圾,实现垃圾分类存储,同时通过射频扫描技术对垃圾桶内的垃圾种类进行自动识别,识别后控制对应的电动推杆伸出,通过物料泵将垃圾抽入到对应的存储空间内,进而实现对垃圾的自动分类回收功能;
27.3、通过吸料管、下料管、抽料管以及软管的设计,在实现自动装车的同时,还可以自动进行卸车,装车与卸车的过程中垃圾收集箱均处于密闭状态,并且在装车与卸车完成后,通过关闭吸料管的电磁阀门,实现垃圾收集箱的完全密封,使垃圾装卸车在装车、卸车以及行驶过程中均不会散发大量臭气,保护操作人员与行人的身体健康;
28.4、通过回收分析模块可以对垃圾桶的回收频率进行监控分析,在垃圾桶的回收频率不满足要求时及时进行预警,进而对操作人员的工作状态进行监督,防止垃圾回收时出现遗漏的现象,保证垃圾回收及时性。
附图说明
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
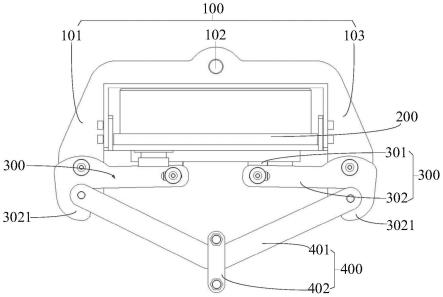
30.图1为本发明实施例一的结构整体示意图;
31.图2为本发明实施例一的集尘机构结构主视剖视图;
32.图3为本发明实施例一的垃圾收集箱的结构俯视剖视图;
33.图4为本发明实施例一的垃圾收集箱的机构俯视剖视图;
34.图5为本发明图4中a处结构放大示意图;
35.图6为本发明实施例二的系统框图;
36.图7为本发明实施例三的方法流程图。
37.图中:1、车体;2、安装板;3、集尘仓;4、集尘机构;401、支架;402、安装框;403、转杆;404、转辊;405、清扫刷;406、传动组件;5、垃圾收集箱;501、隔板;502、挡板;503、抽料管;504、下料管;505、物料泵;506、动力箱;507、电动推杆;508、连接板;509、开口;510、限位套;511、吸料管;512、软管;513、滑块;514、滑轨;6、出尘管。
具体实施方式
38.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普
通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
39.物联网的定义是:通过射频识别、红外感应器、全球定位系统、激光扫描器等信息传感设备,按约定的协议,把任何物品与互联网连接起来,进行信息交换和通讯,以实现智能化识别、定位、跟踪、监控和管理的一种网络。
40.实施例一
41.如图1-5所示,一种基于物联网传感器使用的定点垃圾装卸料车,包括车体1,车体1的两个侧面分别固定安装有安装板2与集尘仓3,安装板2的底部设置有集尘机构4,集尘仓3的顶部固定安装有垃圾收集箱5,集尘仓3的底部固定连通有出尘管6。
42.集尘机构4包括固定安装在安装板2底部的支架401,支架401底部固定安装有安装框402,安装框402的前后内壁之间活动连接有转杆403,转杆403的外表面固定安装有转辊404,转辊404的外表面设有均匀分布的清扫刷405,转杆403的前端穿过安装框402的内壁并延伸至安装框402的外部,安装框402的正面设置有传动组件406,传动组件406包括主动轮、从动轮以及驱动马达,驱动马达输出端固定安装有转轴,转轴后端与安装框402的正面活动连接,主动轮、从动轮分别固定安装在转轴、转杆403的外表面,主动轮与从动轮之间还传动连接有传动皮带;安装框402靠近车体1的一端固定连通有集尘管,集尘管远离安装框402的一端与集尘仓3相连通,集尘管靠近安装框402的一端还设置有压力泵;在垃圾车在行进过程中对路边的灰尘进行自动回收,驱动马达通过传动组件406带动转辊404转动,转辊404将车体1行进方向上的垃圾、灰尘进行清扫,并通过压力泵将清扫出的垃圾、灰尘抽入集尘箱内进行存储,在卸车时再将集尘箱内的垃圾、灰尘通过出尘管6排出,实现一车多用的功能。
43.垃圾收集箱5的顶面与底面之间固定安装有两个相对称的隔板501,两个隔板501将垃圾收集箱5的内部分割为三个收集空间,每个收集空间的顶面与底面之间均固定安装有挡板502,挡板502将收集空间分割为储蓄空间与抽料空间,挡板502贯穿连通有抽料管503,抽料管503位于储蓄空间一端的底部固定连通有下料管504,抽料管503位于抽料空间一端的中部设置有物料泵505,垃圾收集箱5远离车体1的侧面固定安装有动力箱506,动力箱506的内顶壁固定安装有三个均匀分布的电动推杆507,三个电动推杆507与三个抽料管503一一对应,电动推杆507输出端固定安装有连接板508,动力箱506与垃圾收集箱5相靠近的侧面均开设有开口509,连接板508靠近垃圾收集箱5的一端穿过开口509并固定安装有限位套510,限位套510的内圈之间固定安装有吸料管511,吸料管511顶部与抽料管503的底部之间设置有软管512,通过吸料管511、下料管504、抽料管503以及软管512的设计,在实现自动装车的同时,还可以自动进行卸车,装车与卸车的过程中垃圾收集箱5均处于密闭状态,并且在装车与卸车完成后,通过关闭吸料管511的电磁阀门,实现垃圾收集箱5的完全密封,使垃圾装卸车在装车、卸车以及行驶过程中均不会散发大量臭气,保护操作人员与行人的身体健康;吸料管511的底部穿过垃圾收集箱5的内底壁并延伸至垃圾收集箱5的外部,限位套510与连接板508相远离的侧面均固定安装有滑块513,两个滑块513相远离的侧面均活动连接有滑轨514,两个滑轨514的侧面分别与挡板502、动力箱506的内侧面固定连接;将垃圾收集箱5的内部空间分割为三个收集空间,三个收集空间可用于存储不同类型的垃圾,实现垃圾分类存储,同时通过射频扫描技术对垃圾桶内的垃圾种类进行自动识别,识别后控制对应的电动推杆507伸出,通过物料泵505将垃圾抽入到对应的存储空间内,进而实现对垃
圾的自动分类回收功能。
44.出尘管6、抽料管503、下料管504以及吸料管511上均设置有电磁阀。
45.实施例二
46.如图6所示,车体1的内部还设置有处理器,处理器通信连接有采集模块、回收分析模块、控制器以及存储模块。
47.采集模块包括设置在动力箱506底部的射频扫描仪,射频扫描仪用于对垃圾箱上的标签进行扫描,扫描成功后将扫描信息发送至回收分析模块,扫描信息包括垃圾桶编号、扫描时间以及垃圾种类。
48.回收分析模块接收到扫描信息后通过垃圾种类生成对应的控制信号并发送至控制器,控制器接收到控制信号后控制对应的电动推杆507伸出,然后启动物料泵505将垃圾桶中的垃圾通过吸料管511、抽料管503抽入到对应的储蓄空间内,完成垃圾的自动回收;对垃圾进行回收分析:将扫描时间标记为当次时间,将垃圾桶编号发送至存储模块并获取对应垃圾桶上一次进行扫描的时间并标记为上次时间,将当次时间与上次时间的差值标记为间隔时长,通过存储模块获取到间隔阈值,将间隔时长与间隔阈值进行比较:若间隔时长小于间隔阈值,则判定对应垃圾桶的垃圾回收及时性合格,回收分析模块向处理器发送回收及时信号,处理器接收到回收及时信号后将回收及时信号发送至管理人员的手机终端;若间隔时长大于等于间隔阈值,则判定对应垃圾桶的垃圾回收及时性不合格,回收分析模块向处理器发送回收不及时信号,处理器接收到回收不及时信号后将回收不及时信号发送至管理人员的手机终端;对垃圾桶的回收频率进行监控分析,在垃圾桶的回收频率不满足要求时及时进行预警,进而对操作人员的工作状态进行监督,防止垃圾回收时出现遗漏的现象,保证垃圾回收及时性。
49.实施例三
50.如图7所示,一种基于物联网传感器使用的定点垃圾装卸料方法,包括以下步骤:
51.步骤一:将车体1运行至垃圾桶处,并将吸料管511置于垃圾桶的正上方,通过射频扫描仪对垃圾箱上的标签进行扫描并将扫描信息发送至回收分析模块;
52.步骤二:回收分析模块接收到扫描信息后对垃圾桶内的垃圾种类进行识别,通过识别结果控制对应的电动推杆507伸出,通过电动推杆507推动连接板508下移,连接板508下移的过程中带动吸料管511下移,开启吸料管511的电磁阀,然后通过控制器启动物料泵505将垃圾桶中的垃圾通过吸料管511与抽料管503抽入到对应的储藏空间当中进行暂时存储;
53.步骤三:垃圾回收完成后控制电动推杆507收缩,电动推杆507带动连接板508上移,连接板508上移的同时带动吸料管511上移,同时关闭吸料管511的电磁阀,启动车体1向下一垃圾回收处行进,直至所有垃圾桶内的垃圾均完成回收;
54.步骤四:在将垃圾回收仓内的垃圾卸出时,控制吸料管511与下料管504的电磁阀打开,关闭抽料管503的电磁阀,同时启动物料泵505将储蓄空间内的垃圾通过下料管504、抽料管503以及下料管504排出,完成垃圾装车、卸车的整个过程。
55.一种基于物联网传感器使用的定点垃圾装卸料车,工作时,将车体1运行至垃圾桶处,并将吸料管511置于垃圾桶的正上方,通过射频扫描仪对垃圾箱上的标签进行扫描并将扫描信息发送至回收分析模块;回收分析模块接收到扫描信息后对垃圾桶内的垃圾种类进
行识别,通过识别结果控制对应的电动推杆507伸出,通过电动推杆507推动连接板508下移,连接板508下移的过程中带动吸料管511下移,开启吸料管511的电磁阀,然后通过控制器启动物料泵505将垃圾桶中的垃圾通过吸料管511与抽料管503抽入到对应的储藏空间当中进行暂时存储;垃圾回收完成后控制电动推杆507收缩,电动推杆507带动连接板508上移,连接板508上移的同时带动吸料管511上移,同时关闭吸料管511的电磁阀,启动车体1向下一垃圾回收处行进,直至所有垃圾桶内的垃圾均完成回收。
56.以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
57.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
58.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。