技术特征:
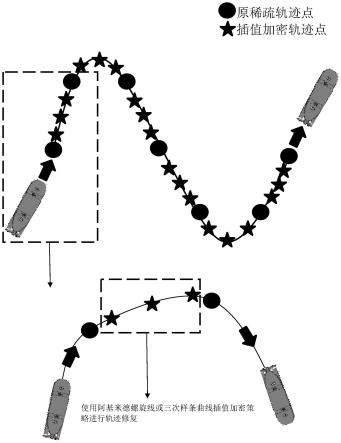
1.一种潜水器运动轨迹修复方法,其特征在于,包括:步骤s1:利用阿基米德螺旋线和三次样条曲线分别对稀疏的试验数据进行插值加密,得到修复后的试验数据;步骤s2:修复后的试验数据基于潜水器一阶非线性操纵响应模型,使用最小二乘法进行潜水器操控系统辨识。2.根据权利要求1所述的潜水器运动轨迹修复方法,其特征在于,所述步骤s1中利用阿基米德螺旋线对稀疏的试验数据进行插值加密采用:阿基米德螺旋线的极坐标公式表示为:r=aθ
ꢀꢀꢀꢀ
(1)其中,r,θ分别表示极径和极角,a表示正常数;使用ψ
i
代表给定的第i个艏向角ψ的数据点,ψ
i
和ψ
i 1
间用阿基米德螺旋线连接,表示为ψ
i
ψ
i 1
,在此之间对ψ
i
的方向进行规定,ψ
i 1
处仅规定位置而不规定方向;为了保证轨迹的曲率连续,其间设置等时间间隔δt的离散化取值,取前一段螺旋线中最后一个插值点表示为则确定ψ
i
ψ
i 1
的初始方向为由此得到ψ
i
ψ
i 1
:其中,σ表示初始角度;ρ表示阿基米德螺旋线螺旋的方向;(t
i
,ψ
i
)表示两个稀疏点间阿基米德螺旋线插值加密后的数据点。3.根据权利要求1所述的潜水器运动轨迹修复方法,其特征在于,所述步骤s1中利用三次样条曲线对稀疏的试验数据进行插值加密采用:设置时间间隔为δt,令重构后的时间序列用t
′
表示,当有n 1个数据节点,那么节点区间数为n,此时有n个关于艏向角ψ三次样条曲线插值多项式:ψ
i
(t
′
)=a
i
b
i
(t
′‑
t
i
) c
i
(t
′‑
t
i
)2 d
i
(t
′‑
t
i
)3ꢀꢀꢀꢀ
(3)其中,a
i
,b
i
,c
i
和d
i
为三次样条曲线插值的多项式系数,(t
i
,ψ
i
)表示两个稀疏点间三次样条曲线插值加密后的数据点。4.根据权利要求1所述的潜水器运动轨迹修复方法,其特征在于,所述步骤s2中潜水器一阶非线性操纵响应模型采用:其中,t和k表示操纵性指数;α表示非线性项系数;为潜水器艏向角速度;ψ为潜水器艏向角;δ为潜水器舵角;表示潜水器艏向角速度关于时间的一阶导数。5.根据权利要求4所述的潜水器运动轨迹修复方法,其特征在于,所述步骤s2采用:将方程潜水器一阶非线性操纵响应模型转化为ψ与δ的关系,代入得:其中,和分别表示艏向角关于时间的一阶与二阶导数;取采样时间间隔δt,基于差分近似处理和可得:
其中,ψ(t)表示t时刻的潜水器艏向角;ψ(t-1)表示t-1时刻的潜水器艏向角;ψ(t-2)表示t-2时刻的潜水器艏向角;δ(t-2)表示t-2时刻的潜水器舵角;将其写成最小二乘格式y(t)=θx(t):输入矩阵x(t):输出标量y(t):y(t)=ψ(t)-2ψ(t-1) ψ(t-2)
ꢀꢀꢀꢀ
(8)待辨识的参数矩阵θ:6.一种潜水器运动轨迹修复系统,其特征在于,包括:模块m1:利用阿基米德螺旋线和三次样条曲线分别对稀疏的试验数据进行插值加密,得到修复后的试验数据;模块m2:修复后的试验数据基于潜水器一阶非线性操纵响应模型,使用最小二乘法进行潜水器操控系统辨识。7.根据权利要求6所述的潜水器运动轨迹修复系统,其特征在于,所述模块m1中利用阿基米德螺旋线对稀疏的试验数据进行插值加密采用:阿基米德螺旋线的极坐标公式表示为:r=aθ
ꢀꢀꢀꢀ
(1)其中,r,θ分别表示极径和极角,a表示正常数;使用ψ
i
代表给定的第i个艏向角ψ的数据点,ψ
i
和ψ
i 1
间用阿基米德螺旋线连接,表示为ψ
i
ψ
i 1
,在此之间对ψ
i
的方向进行规定,ψ
i 1
处仅规定位置而不规定方向;为了保证轨迹的曲率连续,其间设置等时间间隔δt的离散化取值,取前一段螺旋线中最后一个插值点表示为则确定ψ
i
ψ
i 1
的初始方向为由此得到ψ
i
ψ
i 1
:其中,σ表示初始角度;ρ表示阿基米德螺旋线螺旋的方向;(t
i
,ψ
i
)表示两个稀疏点间阿基米德螺旋线插值加密后的数据点。8.根据权利要求6所述的潜水器运动轨迹修复系统,其特征在于,所述模块m1中利用三次样条曲线对稀疏的试验数据进行插值加密采用:设置时间间隔为δt,令重构后的时间序列用t
′
表示,当有n 1个数据节点,那么节点区间数为n,此时有n个关于艏向角ψ三次样条曲线插值多项式:
ψ
i
(t
′
)=a
i
b
i
(t
′‑
t
i
) c
i
(t
′‑
t
i
)2 d
i
(t
′‑
t
i
)3ꢀꢀꢀꢀ
(3)其中,a
i
,b
i
,c
i
和d
i
为三次样条曲线插值的多项式系数,(t
i
,ψ
i
)表示两个稀疏点间三次样条曲线插值加密后的数据点。9.根据权利要求6所述的潜水器运动轨迹修复系统,其特征在于,所述模块m2中潜水器一阶非线性操纵响应模型采用:其中,t和k表示操纵性指数;α表示非线性项系数;为潜水器艏向角速度;ψ为潜水器艏向角;δ为潜水器舵角;表示潜水器艏向角速度关于时间的一阶导数。10.根据权利要求9所述的潜水器运动轨迹修复系统,其特征在于,所述模块m2采用:将方程潜水器一阶非线性操纵响应模型转化为ψ与δ的关系,代入得:其中,和分别表示艏向角关于时间的一阶与二阶导数;取采样时间间隔δt,基于差分近似处理和可得:其中,ψ(t)表示t时刻的潜水器艏向角;ψ(t-1)表示t-1时刻的潜水器艏向角;ψ(t-2)表示t-2时刻的潜水器艏向角;δ(t-2)表示t-2时刻的潜水器舵角;将其写成最小二乘格式y(t)=θx(t):输入矩阵x(t):输出标量y(t):y(t)=ψ(t)-2ψ(t-1) ψ(t-2)
ꢀꢀꢀꢀ
(8)待辨识的参数矩阵θ:
技术总结
本发明提供了一种潜水器运动轨迹修复方法及系统,包括:步骤S1:利用阿基米德螺旋线和三次样条曲线分别对稀疏的试验数据进行插值加密,得到修复后的试验数据;步骤S2:修复后的试验数据基于潜水器一阶非线性操纵响应模型,使用最小二乘法进行潜水器操控系统辨识。本发明针对潜水器实际试验中采集的运动轨迹具有稀疏性这一现象,提出了基于阿基米德螺旋线和三次样条曲线插值加密的潜水器运动轨迹修复策略,可以较精确的还原再现出潜水器的原始运动轨迹,且本策略修复后的轨迹曲率连续、曲线光滑,符合潜水器实际运动的规律,为精确预报潜水器操纵性奠定基础。潜水器操纵性奠定基础。潜水器操纵性奠定基础。
技术研发人员:于曹阳 裴天琪 钟一鸣 王瑞
受保护的技术使用者:上海交通大学
技术研发日:2022.08.23
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。