1.本发明涉及一种驾驶模式切换辅助系统,例如用于在以自动驾驶行驶长距离后切换为手动驾驶时,避免在驾驶者对手动驾驶的适应不充分的状态下突然切换为手动驾驶模式引起的危险性
背景技术:
2.随着自动驾驶技术的进步,从sae定义的等级3到等级4的自动驾驶的实用化接近。在等级3的自动驾驶中,系统实施所有的驾驶任务,但对于系统的介入请求等,驾驶者需要适当地应对,认为在高速公路等中能够比较早期地导入。等级4的自动驾驶是在特定条件下系统实施所有的驾驶任务的,等级5的完全自动驾驶通常是系统实施所有的驾驶任务。
3.至少关于等级3、等级4的自动驾驶,以自动驾驶和手动驾驶的切换为前提,在该情况下,特别是在从自动驾驶切换为手动驾驶时,需要考虑在驾驶者的适应不充分的状态下切换为手动驾驶模式的危险性,关于从自动驾驶向手动驾驶的切换,存在多个专利申请。
4.例如,在专利文献1中公开了一种车辆的自动驾驶装置,其特征在于,作为能够顺畅地进行从自动驾驶向手动驾驶的转移的车辆的自动驾驶装置,具备:移交地点设定单元,其在自动驾驶区间中设定用于开始从自动驾驶向手动驾驶的移交的移交地点;可停止区域设定单元,其设定用于使在自动驾驶区间中通过自动驾驶行驶的本车辆退避的可停止区域;以及自动驾驶控制单元,其进行控制以使本车辆以由可停止区域设定单元设定的可停止区域为自动驾驶的目的地自动行驶,移交地点设定单元在自动驾驶区间中的可停止区域的近前设定移交地点。
5.在专利文献2中公开了一种自动驾驶支援装置,其作为根据能够恢复到手动驾驶为止所需的时间等驾驶者的状况,在从自动驾驶切换为手动驾驶时进行适当的支持,具备:驾驶者监视部,其监视驾驶车辆的驾驶者的状态;以及手动驾驶恢复等级设定部,其基于在驾驶者监视部中检测出的驾驶者的状态,在给定的切换区间中阶段性地设定表示是否为能够从自动驾驶向手动驾驶切换的状态的等级。
6.在专利文献3中公开了一种驾驶支援装置,在无法进行从自动驾驶向手动驾驶的切换的情况下,使车辆可靠地退避到退避场所,等待驾驶者变得能手动驾驶,再将驾驶移交,作为车载系统的驾驶支援装置设定车辆的路径信息,基于该路径信息来控制车辆的行驶所涉及的多个功能部来使车辆自动驾驶,在路径信息所示的路径中,预约存在于自动驾驶区间与手动驾驶区间的边界的近前的退避场所,检测驾驶车辆的驾驶者的状态,在自动驾驶区间与手动驾驶区间的边界的近前,基于驾驶者的状态判定驾驶者是否能够进行手动驾驶,在自动驾驶区间与手动驾驶区间的边界的近前,在判断为驾驶者不能进行手动驾驶的情况下,使车辆退避到预约的退避场所。
7.在专利文献4中公开了如下一种系统,为了实现从预先规定的自动驾驶向手动驾驶的目标恢复成功率(rrr:requested recovery ratio),具有数据处理部,其计算自动驾驶执行中的驾驶者所需的能恢复手动驾驶时间,并基于计算时间来决定手动驾驶恢复请求
通知的通知定时,数据处理部获取作为本地动态地图(ldm)的附属信息而设定的道路区间单位的目标恢复成功率(rrr),利用驾驶者单位的学习数据来计算预定行驶的道路区间单位的能恢复手动驾驶时间。
8.在专利文献5中公开了一种自动驾驶控制装置,其能够可靠且顺利地进行从手动驾驶模式向自动驾驶模式的驾驶模式切换,并且能够使自动驾驶安全地结束,具有:位置检测装置,其检测行驶车辆的位置;驾驶模式切换装置,其进行自动驾驶行驶和由驾驶者进行的手动驾驶行驶的切换;自动驾驶控制器,其进行车辆的驾驶控制;以及致动器,其控制车辆的速度以及转向角,该自动驾驶控制装置具有用于检测超控的超控检测装置,基于该超控检测装置的检测结果来进行行驶车辆的自动驾驶控制。
9.在专利文献6中公开了一种自动驾驶支援系统,其将从自动驾驶切换为基于用户的驾驶操作的手动驾驶的机会提供给用户,取得包含进行车辆的自动驾驶控制的自动驾驶区间的车辆的行驶预定路径,另一方面,在车辆行驶的道路中取得从自动驾驶切换为基于用户的驾驶操作的手动驾驶的切换推荐地点,并在地图图像上显示所取得的切换推荐地点,由此进行催促从自动驾驶向基于用户的驾驶操作的手动驾驶的切换的引导。
10.在先技术文献
11.专利文献
12.专利文献1:日本专利第4985103号公报
13.专利文献2:日本专利第6641916号公报
14.专利文献3:日本特开2018-181120号公报
15.专利文献4:国际公开第2019/202881号
16.专利文献5:日本特开2000-276690号公报
17.专利文献6:日本特开2017-165411号公报
技术实现要素:
[0018]-发明所要解决的课题-[0019]
在专利文献1记载的发明中,从自动驾驶向手动驾驶的切换基本上在行驶中进行,在到达所设定的移交地点时驾驶者睡着的情况下,或者在由移交判断单元判断为不能够从自动驾驶向手动驾驶移交的情况下等,将车辆以自动驾驶至设定于移交地点的前方的可停止区域引导。
[0020]
在专利文献2记载的发明中,从自动驾驶向手动驾驶的切换基本上在行驶中进行,例如基于在驾驶者监视部中检测出的驾驶者的状态,在给定的切换区间中进行是否是能够从自动驾驶向手动驾驶切换的状态的阶段性的等级判定,根据该等级来使到自动驾驶中的切换区间为止的车辆的行驶速度减速,在手动驾驶恢复时间计算部中计算出的时间超过到切换区间为止的行驶所需的时间的情况下,使车辆自动地在退避区域停车。
[0021]
专利文献3所记载的发明也同样地,从自动驾驶向手动驾驶的切换基本上在行驶中进行,在自动驾驶区间与手动驾驶区间的边界的近前,判断驾驶者是否能够进行手动驾驶,在判断为驾驶者不能进行手动驾驶的情况下,能够使车辆向预先预约的退避场所退避,等待驾驶者能够手动驾驶再移交驾驶。
[0022]
在专利文献4记载的发明中,虽然记载了也是先设定自动驾驶区间,在判断为例外
地存在切换不完善事件的情况下,作为惩罚而在服务区等停车一定时间的意思,但原则上成为在自动驾驶的状态的行驶中切换为手动驾驶的结构。
[0023]
在专利文献5记载的发明中,虽然记载了在从自动驾驶变为手动驾驶的预定的时机驾驶者不进行反应的情况下,保持自动驾驶不变地引导到紧急退避道路等的意思,但原则上是行驶中的从自动驾驶向手动驾驶的切换。
[0024]
在专利文献6记载的发明中,在行驶中进行从自动驾驶向手动驾驶的切换时,在判断为难以从自动驾驶区间向手动驾驶的移交的区间设定切换推荐地点,例如在导航装置等的地图图像上显示该切换推荐地点,根据驾驶者的意志从自动驾驶向手动驾驶切换。
[0025]
上述的专利文献1~6记载的发明都是以行驶中的从自动驾驶向手动驾驶的切换为原则,其中,专利文献1~5记载的发明构成为,在根据某些状况判断为驾驶者还未适应手动驾驶的情况下,使自动驾驶继续,直到服务区等可停止区域或者退避区域,使得在可停止区域或者退避区域停车。
[0026]
在这些发明中,关于驾驶者的状态,可以考虑判断驾驶者的清醒状态或者疲劳度等,但即使在身体疲劳度少、意识某种程度清楚的醒着的状态下,也无法避免由于在车辆的行驶中突然切换为手动驾驶而引起的危险性。
[0027]
此外,由于在行驶中掌握驾驶者的状况并切换为自动驾驶,因此直至状况判断确定为止都无法进行切换,切换位置也有可能大幅变动,因此在将切换区间的道路结构、周边的行驶车辆状态加入到切换条件的情况下,不得不成为非常复杂的系统结构。
[0028]
此外,关于从自动驾驶向手动驾驶的切换,也考虑在自动驾驶系统中附加对手动驾驶的异常操作等进行修正的自动驾驶辅助手段,但控制变得复杂,未必充分地发挥功能。
[0029]
本发明是为了解决上述那样的现有技术中的课题而完成的,其目的在于,提供一种能够通过比较简单的系统结构来安全可靠地进行从自动驾驶模式向手动驾驶模式的切换的驾驶模式切换辅助系统。
[0030]-用于解决课题的手段-[0031]
本发明驾驶模式切换辅助系统,用于辅助安全地进行从车辆的驾驶中的自动驾驶模式向手动驾驶模式的切换,其特征在于,具备:驾驶模式切换用空间,沿着车辆通行的道路摄在在能够设置泊车空间的任意的大量地方,为了从自动驾驶切换为手动驾驶而设置,能够泊车;驾驶区间设定单元,以从所述大量驾驶模式切换用空间选择且为了以自动驾驶进行泊车而预先设定的驾驶模式切换用空间的位置为基准,来设定以自动驾驶模式行驶的自动驾驶区间;行驶停止状态维持单元,在将所述车辆以自动驾驶模式引导至从所述自动驾驶区间选择出的所述驾驶模式切换用空间之后,在规定的停止时间的期间,强制性地维持车辆的行驶停止状态。
[0032]
本发明的驾驶模式切换辅助系统自身不是用于在车辆的行驶中从自动驾驶模式向手动驾驶模式切换的系统,而是设想了原则上以自动驾驶将车辆引导至能够泊车的驾驶模式切换用空间并使其停车的情况。
[0033]
不过,不妨碍与本发明的系统分开,,根据需要在行驶中也并用从自动驾驶模式向手动驾驶模式切换的单元。此外,在驾驶模式切换用空间附近难以确保基于自动驾驶的泊车位置的情况下,也考虑使车辆暂时停车,通过手动驾驶将其引导至驾驶模式切换用空间的空闲空间。
[0034]
作为驾驶模式切换用空间,例如考虑将汽车专用道路的服务区内的空间的一部分用作驾驶模式切换用空间。
[0035]
此外,在便利性方面,将驾驶模式切换用空间设置在高速公路等汽车专用道路的出口附近的出口外、即离开出口的位置的附近也是有效的。
[0036]
此外,如果将驾驶模式切换用空间沿着汽车专用道路或者能够进行自动驾驶的一般道路,作为专用的驾驶模式切换用空间而大量分散配置,则能够解决在需要时被其他车辆使用而没有空闲空间、驾驶模式切换用空间不容易找到的问题。
[0037]
驾驶区间设定单元例如与现有的导航系统协作,在导航系统中除了最终目的地以外,还将驾驶模式切换用空间设定为经由地等,这样的结构简单。
[0038]
行驶停止状态维持单元例如能够通过向车辆的驱动控制系统发送动作停止的控制信号而使车辆无法行驶,但停止状态维持单元并不限定于此,例如也可以考虑不能够进行基于钥匙或者按钮等的发动机的起动操作的方法。
[0039]
如果在驾驶模式切换用空间设置用于将驾驶者的清醒状态引导为适于驾驶的清醒状态的清醒辅助单元,则与仅等待时间的经过的情况相比,能够将驾驶者的状态尽早地保持为适于驾驶的状态。
[0040]
在高速公路的服务区内设置有驾驶模式切换用空间的情况下,通常大多能够利用服务区内的餐饮品提供设施、其他服务设施,但在除此以外的驾驶模式切换用空间设置于汽车专用道路的出口附近的出口外的情况下、设置专用的驾驶模式切换用空间的情况下,也优选在驾驶模式切换用空间内设置清醒辅助单元。
[0041]
作为清醒辅助单元,例如可以举出自动售货机或售货亭等中的具有清醒作用的咖啡、茶、口香糖、薄荷系刺激剂等餐饮品的提供单元、具有清醒作用的刺激附加单元(视觉刺激、声音刺激、身体刺激、穴位刺激等)、运动空间、睡眠空间、放松用空间等。它们可以任意组合一个或两个以上来提供。
[0042]
关于基于行驶停止状态维持单元的强制停止时间,认为驾驶者的疲劳度、清醒状态的程度根据到目的地为止的行驶距离、行驶时间等当然也不同,因此优选设置用于根据事前的设定、自动驾驶区间的距离或者自动驾驶区间的行驶时间等进行调整的停止时间调整单元。
[0043]
例如,考虑设置用于在长距离行驶的情况下延长停止时间、在比较短距离的行驶的情况下缩短停止时间的停止时间调整单元。停止时间调整单元能够与驾驶区间设定单元等一起使用控制用计算机的运算处理单元。
[0044]
此外,通过追加地设置用于在进入手动驾驶之前确认驾驶者对向手动驾驶模式的切换的适应状态的适应状态确认单元、和根据由适应状态确认单元确认到的驾驶者的适应状态来增减停止时间的停止时间增减单元,从而在判断为存在危险性的情况下,能够与最初设定的估算停止时间的经过无关地维持停止状态而提高安全性。
[0045]
此外,根据状况,考虑在紧急事态的发生时强制性地解除行驶停止状态的必要性。作为用于该目的的方法,考虑设置行驶停止状态紧急解除单元。
[0046]
不过,在该情况下,为了避免使行驶停止状态紧急解除单元轻易地动作,优选行驶停止状态紧急解除单元能够基于判定满足给定的解除条件的解除条件判定单元进行动作。
[0047]
作为解除条件,具体而言,例如可以举出:根据驾驶者的身体状况或者精神状况,
无论如何都需要使车辆出发的情况;在由于灾害、事故的发生而成为必须紧急避难的状况的情况下,存在客观地需要进行早期的车辆的移动的经由第三者的解除请求的情况等。
[0048]
优选驾驶模式切换用空间设置在尽可能大量的地方,但从能够设置的场所、经济性的观点出发,设置地方有限,未必能够利用有利的条件的驾驶模式切换用空间。
[0049]
因此,考虑根据与时刻变化的各驾驶模式切换用空间的便利性相关的状况,将驾驶模式切换用空间分类为带有优先顺位的多个分级,并设置根据该分级来选择利用的驾驶模式切换用空间的单元。
[0050]
作为与便利性相关的状况,例如能够将与各驾驶模式切换用空间的地理条件、地形条件、广度相关的条件、与使用频度相关的条件、空闲条件等作为判断要素,将它们中的任意一个或者2个以上的条件、或者这些以外的条件判断为判断要素。
[0051]
此外,关于预想会发生由满载等无法立即利用的状况的驾驶模式切换用空间,考虑设置迂回路,其附随于驾驶模式切换用空间,作为无法立即利用驾驶模式切换用空间的情况下的待机车道,前往驾驶模式切换用空间。
[0052]
即,在无法立即利用驾驶模式切换用空间的情况下,能够将车辆引导至待机车道而暂时停车,在驾驶模式切换用空间空闲的时间点,将车辆从待机车道引导至驾驶模式切换用空间并停车。
[0053]-发明效果-[0054]
本发明的驾驶模式切换辅助系统不是如前述的专利文献1~4所记载的发明那样构成为在车辆的行驶中进行从自动驾驶向手动驾驶的切换,而是构成为原则上以自动驾驶将车辆引导至能够泊车的驾驶模式切换用空间,使其停车,在经过一定时间后能够进行手动驾驶,因此能够通过比较简单的系统结构来安全可靠地进行从自动驾驶模式向手动驾驶模式的切换。
[0055]
此外,通过在驾驶模式切换用空间设置用于将驾驶者的清醒状态引导为适于驾驶的清醒状态的各种清醒辅助单元,或者设置用于根据自动驾驶区间的距离或者自动驾驶区间的行驶时间来调整停止时间的停止时间调整单元、用于在手动驾驶的开始前确认驾驶者的适应状态的适应状态确认单元等,能够进一步提高从自动驾驶模式向手动驾驶模式的切换的安全性。
[0056]
此外,在紧急事态中,通过设置强制性地解除行驶停止状态的行驶停止状态紧急解除单元,在发生了非预期的紧急事态的情况下,能够迅速地进行退避等。
附图说明
[0057]
图1是概念性地表示本发明的驾驶模式切换辅助系统的一实施方式中的自动驾驶区间与手动驾驶区间的关系的图。
[0058]
图2是表示使用了本发明的驾驶模式切换辅助系统的情况下的一系列操作的流程的流程图。
[0059]
图3是概念性地表示本发明的驾驶模式切换辅助系统的其他实施方式中的自动驾驶区间与手动驾驶区间的关系的图。
[0060]
图4是概念性地表示本发明的驾驶模式切换辅助系统的另一实施方式中的自动驾驶区间与手动驾驶区间的关系的图。
具体实施方式
[0061]
以下,基于附图对本发明进行说明。
[0062]
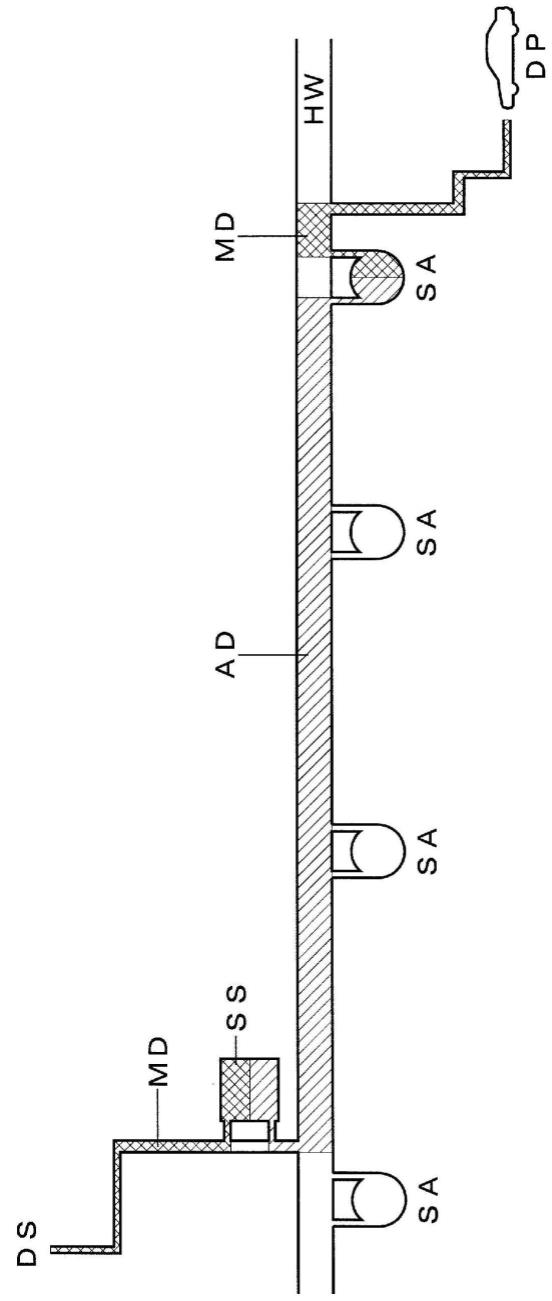
图1是概念性地表示本发明的驾驶模式切换辅助系统的一实施方式中的自动驾驶区间ad与手动驾驶区间md的关系的图。
[0063]
该例子设想经由高速公路hw去往位于远处的目的地ds的情况。从自家等出发地dp通过手动驾驶进入高速公路hw的入口,将到最初的服务区sa为止设为手动驾驶区间md。
[0064]
在服务区sa中切换为自动驾驶,自动驾驶区间ad以自动驾驶模式使车辆行驶。在该例子中,在从接近目的地ds的出口出来的附近设定有驾驶模式切换用空间ss,使其通过自动驾驶在预先设定的驾驶模式切换用空间ss内的泊车空间内泊车。
[0065]
在驾驶模式切换用空间ss设置于服务区sa内的情况下,也能够利用服务区sa内的驾驶模式切换用空间ss。此外,如果沿着高速公路hw或者沿着出高速公路hw后的一般道路设置专用的驾驶模式切换用空间ss,则也能够利用这样的专用的驾驶模式切换用空间ss。
[0066]
在本发明的系统中,在泊车后,在由行驶停止状态维持单元预先估算出的给定的停止时间的期间,无法使车辆起步。
[0067]
如果经过给定的停止时间,则车辆的强制的停止状态被解除,能够切换为手动驾驶而使车辆起步。在停止时间的期间,驾驶者能够采取休息或者在驾驶模式切换用空间ss内的自动售货机或者店铺等购买咖啡而饮用,或者以较轻的运动来转换心情。
[0068]
驾驶者通过在停止时间的期间恢复清醒状态而成为适于驾驶的状态,能够从驾驶模式切换用空间ss以手动驾驶前往目的地ds。
[0069]
图2是表示使用了本发明的驾驶模式切换辅助系统的情况下的一系列操作的流程的流程图。
[0070]
首先,从能够协作地操作车载的输入装置或者系统的智能手机等便携终端设定目的地。另外,在与导航装置协作的情况下,能够利用导航装置的功能。
[0071]
在到目的地为止的路径中不利用自动驾驶的情况下,不利用本发明的系统而通过手动驾驶前往目的地。
[0072]
在到目的地为止的路径的一部分、例如高速公路区间中利用自动驾驶的情况下,选择作为自动驾驶的终点的驾驶模式切换用空间。通常,只要选择能够进行基于自动驾驶的行驶的区间的最接近目的地的驾驶模式切换用空间即可,但能够根据各驾驶模式切换用空间的便利性、规模来任意地选择。此外,通过选择驾驶模式切换用空间,来设定自动驾驶区间的终点。
[0073]
驾驶模式切换用空间也可以利用通信单元预先预约,但在预想到目的地较远、到达时间大幅变动的情况下,考虑设为在行驶途中预约、或者能够进行预约的变更的系统。在驾驶模式切换用空间存在富余的情况下,也可能存在没有预约的方式。
[0074]
如果设定的操作完成,则能够以手动驾驶开始车辆的行驶,在任意的切换地点切换为自动驾驶。在该情况下,还能将图1所示的高速公路hw的服务区sa作为切换地点,此外,也可以在行驶中从手动驾驶切换为自动驾驶。
[0075]
之后,能够使车辆以自动驾驶行驶至所选择的驾驶模式切换用空间。
[0076]
在驾驶模式切换用空间接近的状态下,确认通过通信单元等预约的空间或者没有预约的空间打开,在获知无法利用所选择的驾驶模式切换用空间的情况下,重新选择其他
能够利用的驾驶模式切换用空间。
[0077]
或者,对于所选择的驾驶模式切换用空间,在一并设置有能够迂回进场的待机车道的情况下,也可以在待机车道停车,直到空出驾驶模式切换用空间,在驾驶模式切换用空间空闲的时间点,使其在驾驶模式切换用空间中停车。
[0078]
如果到达驾驶模式切换用空间并停止驾驶,则成为在预先设定的停止时间的期间无法进行基于手动驾驶的行驶的状态,维持行驶停止状态。停止时间的长度也可以将行驶距离、行驶时间等要素加入判断要素来估算。
[0079]
另外,如果需要,则也可以构成为,在无法进行基于手动驾驶的行驶的状态下,能够选择新的驾驶模式切换用空间,重新开始自动驾驶直至新的驾驶模式切换用空间。
[0080]
驾驶者在停止时间的期间,在设置于驾驶模式切换用空间的自动售货机、售货亭等中,能够购入咖啡、茶饮料来饮用,或者进行较轻的运动,或者实现放松而治愈疲劳,从而能够维持适于驾驶的通常的清醒状态。
[0081]
然而,在无论如何都需要使车辆出发的情况下、发生由于灾害、事故的发生而不得不紧急避难的紧急解除事态的情况下,根据由行驶停止状态紧急解除单元进行的客观的判断,来强制性地解除行驶停止状态。
[0082]
在经过了给定的停止时间后,或者发生紧急解除事态而进行了例外的停止解除的情况下,驾驶者能够从停止的驾驶模式切换用空间开始手动驾驶,使车辆以手动驾驶行驶到目的地。
[0083]
图3是概念性地表示本发明的驾驶模式切换辅助系统的其他实施方式中的自动驾驶区间与手动驾驶区间的关系的图。
[0084]
该例子基本上与图1的实施方式相同,但在图1的实施方式中,从自家等出发地dp通过手动驾驶进入高速公路hw的入口,将到最初的服务区sa为止设为手动驾驶区间md,在服务区sa中切换为自动驾驶,与此相对,在图3的实施方式中,是如下情况:在从自家等出发地dp通过手动驾驶进入到高速公路hw的入口之后,在高速公路hw的行驶中从手动驾驶切换为自动驾驶,不依赖于服务区sa而直接以自动驾驶使车辆行驶至接近目的地ds的驾驶模式切换用空间ss。
[0085]
其他与在图1的实施方式中说明的相同。
[0086]
图4是概念性地表示本发明的驾驶模式切换辅助系统的另一实施方式中的自动驾驶区间与手动驾驶区间的关系的图。
[0087]
该例子设想在经由高速公路hw去往位于远处的目的地ds的情况下,到目的地ds为止的行驶时间非常长,在中途的服务区sa等中采取饮食等休憩的情况。
[0088]
从出发地dp通过手动驾驶进入高速公路hw的入口后,在高速公路hw的行驶中从手动驾驶切换为自动驾驶为止,与图3的实施方式的情况相同,但除了目的地ds之外,还预先设定到中途的服务区sa为止的自动驾驶,能够在服务区sa进行饮食或者休憩。
[0089]
在从停车的服务区sa出发时,能够通过手动驾驶进行发车并在行驶状态下切换为自动驾驶,或者如果能够进行基于从服务区sa起的自动驾驶的发车,则直接以自动驾驶进入高速公路hw的主路,能够使车辆以自动驾驶行驶至接近目的地ds的驾驶模式切换用空间ss。
[0090]
此外,除此之外,在行驶中需要在预定外的服务区sa顺便停留的情况下,也可以在
行驶中设定附近的服务区sa,来进行顺便停留。
[0091]-附图标记说明-[0092]
dp
…
出发地,ds
…
目的地,hw
…
高速公路,sa
…
服务区,ss
…
驾驶模式切换用空间,md
…
手动驾驶区间,ad
…
自动驾驶区间。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。