1.本发明涉及一种校园道路自主清洁机器人,属于自动化清洁设备技术领域。
背景技术:
2.随着经济的快速发展和人民生活水平的提高,人们对环境卫生和城市美化变得更加重视,城市卫生极大地影响着人民的幸福感指数,但清扫面积大、路况危险、劳动条件差等因素使得道路的清扫工作变得困难。多数清扫工作仍依赖人工,人工效率低下、收益低,招工困难,因此清洁机器人有了很大的应用市场。特别是在大学校园这种相对独立而面积较大的单位,清扫车无法配合工作、人工清扫费时费力。
技术实现要素:
3.为了克服背景技术中存在的问题,本发明通过行走装置配合感应机构能够探测并规划清洁路线,及时避开起伏路段和坑洞,清扫机构配合吸尘装置能够对行驶路段进行清洁,并将路段的大、小垃圾分开收集处理,安装太阳能电板使机器人能够随时充电,增强续航和适用场景,能够实现高度自动化,极大地降低了校园的清洁成本。
4.为了克服背景技术中存在的问题,为解决上述问题,本发明通过如下技术方案实现:所述校园道路自主清洁机器人包括机架、行走装置、吸尘装置、感应机构、清扫机构、控制中心、太阳能电板,所述机架上安装有行走装置,机架上通过支架安装欧太阳能电板,机架前端安装有感应后探测并规划路线进而控制行走装置驱动的感应机构,机架底部安装有清扫机构,清扫机构对应设置有吸尘装置,吸尘装置配合清扫机构能够将吸入的大垃圾和小垃圾进行分离收集,机架上还安装有控制中心,所述行走装置、吸尘装置、感应机构、清扫机构均连接控制中心。
5.优选地,所述行走装置包括麦轮电机、麦轮支架、麦克纳姆轮,所述机架底部四角位置通过麦轮支架安装有麦轮电机,麦轮电机输出轴安装有麦克纳姆轮。
6.优选地,所述吸尘装置包括吸杆、连接曲管、桶体、过滤网、顶盖、负压风机、过滤器,所述桶体安装机架上,桶体上通过连接曲管安装有吸杆,桶体上安装有顶盖,顶盖底部通过机头下板安装有连接过滤器的负压风机,顶盖上还安装有覆盖过滤器和负压风机的过滤网。
7.优选地,所述感应机构包括光学传感器、激光雷达、摄像头,所述光学传感器、激光雷达、摄像头均至少设置有一个,光学传感器通过支架安装在机架上并向前延伸设置,激光雷达和摄像头设置于机架前端中央位置。
8.优选地,所述清扫机构包括边刷、主刷、边刷电机、主刷电机,所述机架底部沿左右两侧通过边刷支架对称安装有边刷,边刷支架上安装有用于驱动边刷的边刷电机,边刷后侧沿机架底部通过主刷支架安装有主刷,主刷支架上安装有用于驱动主刷的主刷电机。
9.优选地,所述机架底部开设有对应主刷的开口,开口沿垃圾出料对应有收集箱入
料口。
10.优选地,所述控制中心包括陀螺仪传感器、车轮编码器、定时器和蓄电模块、电量检测装置、控制器,所述陀螺仪传感器、车轮编码器、定时器和蓄电模块、电量检测装置均连接控制器,且麦轮电机、负压风机、光学传感器、激光雷达、摄像头、边刷电机、主刷电机也均连接控制器。
11.本发明的有益效果为:本发明通过行走装置配合感应机构能够探测并规划清洁路线,及时避开起伏路段和坑洞,清扫机构配合吸尘装置能够对行驶路段进行清洁,并将路段的大、小垃圾分开收集处理,安装太阳能电板使机器人能够随时充电,增强续航和适用场景,能够实现高度自动化,极大地降低了校园的清洁成本。
附图说明
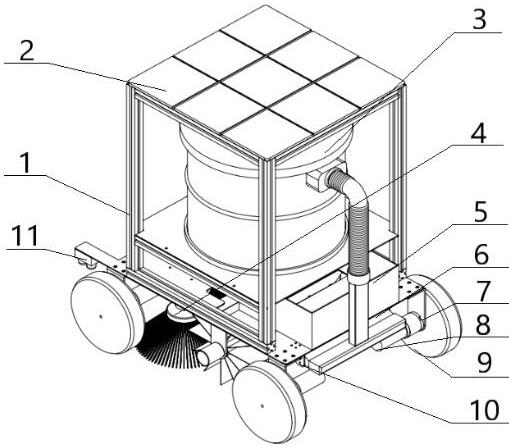
12.图1是本发明结构示意图;图2是本发明内部结构示意图;图3是本发明清扫机构示意图;图4是本发明可拆吸尘装置示意图。
13.图中标号为:1-机架、2-太阳能电板、3-吸尘装置、3-1-吸杆、3-2-连接曲管、3-3-桶体、3-4-过滤网、3-5-顶盖、3-6-负压风机、3-7-机头下板、3-8-过滤器、4-清扫机构、4-1-边刷卡板、4-2-边刷、4-3-主刷、4-4-主刷卡板、4-5-主刷电机、5-隔板、6-负压箱、7-麦轮支架、8-麦轮电机、9-麦克纳姆轮、10-负压箱支架、11-光学传感器、12-激光雷达、13-摄像头、14-垫片支架、15-控制中心。
具体实施方式
14.为了使本发明的目的、技术方案和有益效果更加清楚,下面将结合附图,对本发明的优选实施例进行详细的说明,以方便技术人员理解。
15.如图1-4所示,所述校园道路自主清洁机器人包括机架1、行走装置、吸尘装置3、感应机构、清扫机构4、控制中心15、太阳能电板2,所述机架1上安装有行走装置,机架1上通过支架安装欧太阳能电板2,机架1前端安装有感应后探测并规划路线进而控制行走装置驱动的感应机构,机架1底部安装有清扫机构4,清扫机构4对应设置有吸尘装置3,吸尘装置3配合清扫机构4能够将吸入的大垃圾和小垃圾进行分离收集,机架1上还安装有控制中心15,所述行走装置、吸尘装置3、感应机构、清扫机构4均连接控制中心15。
16.机架1基于铝型材框架设计,机架1底部设置有底板,沿底板顶部形成有上腔和下腔,上腔和下腔之间设置有凸台,底板上还设置有向前延伸的前台,底板上设置有前后开口的负压箱,负压箱前侧设置档杆,避免较大的垃圾进入负压箱,负压箱顶部设置隔板5,隔板5结合侧面围设的侧板形成顶部和前侧开口的收集箱,收集箱用于收集较大的垃圾,隔板5前侧可沿前侧上扬一定较低,也可将隔板5倾斜设置,前侧高、后侧低,避免进入的较大垃圾在行驶过程中发生掉落,相应地,档杆也可形成相对倾斜的角度,易于大的垃圾可沿倾斜位置在负压作用下进入收集箱。
17.所述行走装置包括麦轮电机8、麦轮支架7、麦克纳姆轮9,所述机架1底部四角位置
通过麦轮支架7安装有麦轮电机8,麦轮电机8输出轴安装有麦克纳姆轮9。
18.所述吸尘装置3包括吸杆3-1、连接曲管3-2、桶体3-3、过滤网3-4、顶盖3-5、负压风机3-6、过滤器3-8,所述桶体3-3安装机架1上,桶体3-3上通过连接曲管3-2安装有吸杆3-1,桶体3-3上安装有顶盖3-5,顶盖3-5底部通过机头下板3-7安装有连接过滤器3-8的负压风机3-6,顶盖3-5上还安装有覆盖过滤器3-8和负压风机3-6的过滤网3-4,在本实施例中,凸台上还设置曲管支架,对吸杆3-1和连接曲管3-2进行定位的圆环支架,吸杆3-1底部设置横杆,横杆上开设对应负压箱6的开口,桶体3-3内部形成负压后,在横杆开口抽取空气,使得负压箱内部形成负压效果。顶盖3-5上设置有控制旋钮、把手及出气孔,负压风机3-6、机头下板3-7与顶盖3-5活动连接,过滤器3-8与机头下板3-7活动连接,在本实施例中,活动连接的方式采用螺纹连接。在使用过程中可通过控制中心15自动开启负压风机3-6,也可打开顶盖3-5上的控制旋钮,负压风机3-6转动,较小垃圾及灰尘从吸杆3-1、连接曲管3-2、桶体3-3上的通孔吸入,经过滤网3-4、过滤器3-8过滤后,较小垃圾及灰尘留在桶体3-3内部,空气从顶盖3-5上出气孔排出,在本实施例中过滤器3-8选用空气滤芯,空气滤芯连接负压风机3-6的进风口。
19.所述感应机构包括光学传感器11、激光雷达12、摄像头13,所述光学传感器11、激光雷达12、摄像头13均至少设置有一个,光学传感器11通过支架安装在机架1上并向前延伸设置,激光雷达12和摄像头13设置于机架1前端中央位置。在本实施例中,光学传感器11安装于前台上,摄像头13通过垫片支架14安装于凸台上,控制中心15、激光雷达12与底板固定连接,摄像头13可识别垃圾并探测障碍,激光雷达12通过脉冲测量与周围物体间的距离,从而帮助控制中心15创建环境地图并规划路线。
20.所述清扫机构4包括边刷4-2、主刷4-3、边刷4-2电机、主刷电机4-5,所述机架1底部沿左右两侧通过边刷支架4-1对称安装有边刷4-2,边刷支架4-1上安装有用于驱动边刷4-2的边刷4-2电机,边刷4-2后侧沿机架1底部通过主刷支架4-4安装有主刷4-3,主刷支架4-4上安装有用于驱动主刷4-3的主刷电机4-5。所述机架1底部开设有对应主刷4-3的开口,开口沿垃圾出料对应有收集箱入料口。边刷4-2电机、主刷电机4-5均连接控制中心15。在本实施例中,两对称的驱动方向相反,如左边的边刷4-2电机为顺时针转动,则右边的边刷4-2电机为逆时针转动,使得两边刷4-2将清扫垃圾向两边刷4-2中央移动,利于主刷4-3进行垃圾的清理的收集,之后垃圾进入主刷4-3位置,如图1所示,主刷电机4-5驱动主刷4-3顺时针转动,主刷4-3沿开口位置的切向方向指向收集箱入料口方向,主刷4-3将垃圾及灰尘进一步扬起,在主刷电机4-5驱动主刷4-3,配合吸尘装置3在负压箱位置形成的负压效果,垃圾均沿机架1底部的开口进入,小垃圾沿负压箱进入吸尘装置3,大垃圾在吸尘装置3和主刷4-3作用下,沿开口进入后,在负压进一步作用下,沿倾斜设置的档杆被抬升后直接落入收集箱。
21.所述控制中心15包括陀螺仪传感器、车轮编码器、定时器和蓄电模块、电量检测装置、控制器,所述陀螺仪传感器、车轮编码器、定时器和蓄电模块、电量检测装置均连接控制器,且麦轮电机8、负压风机3-6、光学传感器11、激光雷达12、摄像头13、边刷4-2电机、主刷电机4-5也均连接控制器。控制器用于控制运动、识别、清扫等,陀螺仪传感器帮助机器人做精确的角度转弯,车轮编码器用于计算车轮转动,定时器用于计时和定时,电量检测装置用于检测蓄电模块的电量。
22.本发明的使用过程:机器人检测电量是否充足,若否,提示充电,进入休眠状态;若是,进行下一步,机器人联网、定位、按规定路线行驶。(若需要机器人联网、定位,需要公开相关的模块,stm32-gps北斗双模定位模块),控制中心15控制麦轮电机8带动麦轮转动,使机器人前进。光学传感器11、激光雷达12、摄像头13实时工作,激光雷达12绘制地图,控制中心15用slam算法实时修改路径,机器人向垃圾移动,同时启动吸尘装置3及清扫机构4,将垃圾清扫、收集。机器人需要停放时,机器人到达停放区,检测电量是否充足,若是,机器人自动休眠;若否,机器人提示充电,进入省电状态。
23.本发明通过行走装置配合感应机构能够探测并规划清洁路线,及时避开起伏路段和坑洞,清扫机构配合吸尘装置能够对行驶路段进行清洁,并将路段的大、小垃圾分开收集处理,安装太阳能电板使机器人能够随时充电,增强续航和适用场景,能够实现高度自动化,极大地降低了校园的清洁成本。
24.最后说明的是,以上优选实施例仅用以说明本发明的技术方案而非限制,尽管通过上述优选实施例已经对本发明进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本发明权利要求书所限定的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。