技术特征:
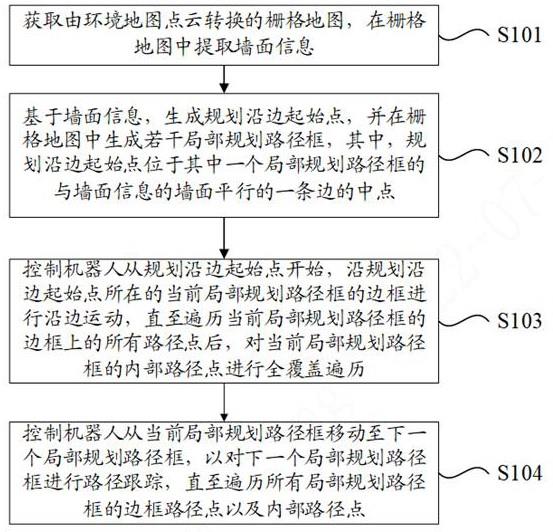
1.一种机器人控制方法,其特征在于,所述机器人控制方法包括:获取由环境地图点云转换的栅格地图,在所述栅格地图中提取墙面信息;基于所述墙面信息,生成规划沿边起始点,并在所述栅格地图中生成若干局部规划路径框,其中,所述规划沿边起始点位于其中一个局部规划路径框的与所述墙面信息的墙面平行的一条边的中点;控制所述机器人从所述规划沿边起始点开始,沿所述规划沿边起始点所在的当前局部规划路径框的边框进行沿边运动,直至遍历所述当前局部规划路径框的边框上的所有路径点后,对所述当前局部规划路径框的内部路径点进行全覆盖遍历;控制所述机器人从所述当前局部规划路径框移动至下一个局部规划路径框,以对所述下一个局部规划路径框进行路径跟踪,直至遍历所有局部规划路径框的边框路径点以及内部路径点。2.根据权利要求1所述的机器人控制方法,其特征在于,所述在所述栅格地图中提取墙面信息之后,所述在所述栅格地图中生成若干局部规划路径框之前,所述机器人控制方法还包括:在所述栅格地图中提取障碍物位置;基于所述障碍物位置在所述栅格地图中生成所述若干局部规划路径框,其中,所述若干局部规划路径框的边框以及内部区域均不存在障碍物。3.根据权利要求2所述的机器人控制方法,其特征在于,所述障碍物包括充电桩;所述基于所述墙面信息,生成规划沿边起始点,包括:基于所述墙面信息,以及所述充电桩的位置生成所述规划沿边起始点;其中,所述规划沿边起始点为与所述墙面相距第一预设距离的若干栅格点中,与所述充电桩的相对距离小于等于第二预设距离的至少一个栅格点。4.根据权利要求1所述的机器人控制方法,其特征在于,所述沿所述规划沿边起始点所在的当前局部规划路径框的边框进行沿边运动,包括:在控制所述机器人沿当前局部规划路径框的边框进行沿边运动的过程中,获取运动方向上的障碍物感知距离;在所述障碍物感知距离小于第三预设距离时,触发遇障固定动作;在所述机器人执行所述遇障固定动作的过程中,监测所述机器人与所述墙面的侧向距离;在所述侧向距离小于第四预设距离时,退出所述遇障固定动作,并基于当前位置继续执行沿边运动。5.根据权利要求4所述的机器人控制方法,其特征在于,所述遇障固定动作为:控制所述机器人沿第一方向旋转,并记录第一旋转角度;在所述第一旋转角度达到第一预设角度时,控制所述机器人沿第二方向旋转,并记录第二旋转角度;在所述第二旋转角度达到第二预设角度时,控制所述机器人停止旋转;所述第一方向与所述第二方向为两个相反的方向。6.根据权利要求4所述的机器人控制方法,其特征在于,所述基于当前位置继续执行沿边运动,包括:
判断所述机器人的当前位置是否处于所述当前局部规划路径框的边框上;若是,则从所述当前位置开始继续执行沿边运动;若否,则获取所述当前局部规划路径框的边框上与所述当前位置距离最小的跟踪路径点,并将所述机器人从所述当前位置调度到所述跟踪路径点,从所述跟踪路径点开始继续执行沿边运动。7.根据权利要求6所述的机器人控制方法,其特征在于,所述将所述机器人从所述当前位置调度到所述跟踪路径点,包括:获取所述机器人从所述当前位置调度到所述跟踪路径点的调度路径;按照所述调度路径将所述机器人从所述当前位置调度到所述跟踪路径点,并将所述调度路径上的路径点标记为已遍历点。8.根据权利要求1所述机器人控制方法,其特征在于,所述控制所述机器人从所述当前局部规划路径框移动至下一个局部规划路径框,以对所述下一个局部规划路径框进行路径跟踪,包括:获取所述当前局部规划路径框与其余局部规划路径框的相对距离;将与所述当前局部规划路径框的相对距离最小的局部规划路径框,作为所述当前局部规划路径框的下一个局部规划路径框;获取所述下一个局部规划路径框与所述墙面信息的墙面平行的两个边框,并计算所述两个边框中与所述墙面的相对距离;在所述两个边框中相对距离小的一个边框的中点,设置新的规划沿边起始点;控制所述机器人从所述新的规划沿边起始点开始,沿所述下一个局部规划路径框的边框进行沿边运动。9.一种机器人,其特征在于,所述机器人包括处理器以及与所述处理器连接的存储器,其中,所述存储器中存储有程序数据,所述处理器执行所述存储器存储的所述程序数据,以执行实现:获取由环境地图点云转换的栅格地图,在所述栅格地图中提取墙面信息;基于所述墙面信息,生成规划沿边起始点,并在所述栅格地图中生成若干局部规划路径框,其中,所述规划沿边起始点位于其中一个局部规划路径框的与所述墙面信息的墙面平行的一条边的中点;控制所述机器人从所述规划沿边起始点开始,沿所述规划沿边起始点所在的当前局部规划路径框的边框进行沿边运动,直至遍历所述当前局部规划路径框的边框上的所有路径点后,对所述当前局部规划路径框的内部路径点进行全覆盖遍历;控制所述机器人从所述当前局部规划路径框移动至下一个局部规划路径框,以对所述下一个局部规划路径框进行路径跟踪,直至遍历所有局部规划路径框的边框路径点以及内部路径点。10.一种计算机可读存储介质,其特征在于,其内部存储有程序指令,所述程序指令被执行以实现:获取由环境地图点云转换的栅格地图,在所述栅格地图中提取墙面信息;基于所述墙面信息,生成规划沿边起始点,并在所述栅格地图中生成若干局部规划路径框,其中,所述规划沿边起始点位于其中一个局部规划路径框的与所述墙面信息的墙面
平行的一条边的中点;控制所述机器人从所述规划沿边起始点开始,沿所述规划沿边起始点所在的当前局部规划路径框的边框进行沿边运动,直至遍历所述当前局部规划路径框的边框上的所有路径点后,对所述当前局部规划路径框的内部路径点进行全覆盖遍历;控制所述机器人从所述当前局部规划路径框移动至下一个局部规划路径框,以对所述下一个局部规划路径框进行路径跟踪,直至遍历所有局部规划路径框的边框路径点以及内部路径点。
技术总结
本申请公开了一种机器人控制方法、机器人及计算机可读存储介质。该方法包括:获取由环境地图点云转换的栅格地图,在栅格地图中提取墙面信息;基于墙面信息,生成规划沿边起始点,并在栅格地图中生成若干局部规划路径框;控制机器人从规划沿边起始点开始,沿规划沿边起始点所在的当前局部规划路径框的边框进行沿边运动,直至遍历当前局部规划路径框的边框上的所有路径点后,对当前局部规划路径框的内部路径点进行全覆盖遍历;控制机器人从当前局部规划路径框移动至下一个局部规划路径框,直至遍历所有局部规划路径框的边框路径点以及内部路径点。本申请可以控制机器人在局部规划路径框区域内快速开展全覆盖清扫,提高机器人的清扫效率。扫效率。扫效率。
技术研发人员:陈一彬 马子昂 刘征宇
受保护的技术使用者:杭州华橙软件技术有限公司
技术研发日:2022.10.17
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。