技术特征:
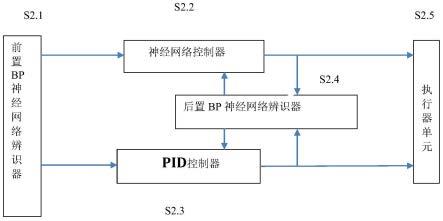
1.根据权利要求1,一种胰腺与十二指肠术后康复针灸机器人定位运动在空间环境的智能控制方法,主要涉及了智能控制体系中的人工智能方面的控制方法,其核心控制策略是基于神经网络控制与pid控制相结合的控制方法。所述神经网络控制,包括神经网络控制bp权值控制s2.1、s2.2s、s2.4与pid控制单元s2.3。所述,其特征为:胰腺与十二指肠术后康复针灸机器人定位运动在空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制单元中,被设计了神经网络控制控制器s2.2、神经网络控制辨识器s2.1~s2.2、pid控制器s2.等。所述,其特征为:神经网络控制控制器s2.2、被设置在智能控制器的中心;神经网络控制辨识器s2.1,被设置在智能控制器的两端;pid控制器s2.4,被设置在智能控制器的后端。所述,其特征为:神经网络控制辨识器单元s2.1、s2.3,被用于进行信息数据的感知与识别,在处理完信息数据后,再将被处理的结果信息,传送到神经网络控制控制器单元中。所述,其特征为:神经网络控制控制器单元s2.2,被用于进行信息数据的复杂性的、非线性的综合处理,在处理完信息数据后,再将被处理的结果信息,传送到pid控制单元中。2.根据权利要求1,所述胰腺与十二指肠术后康复针灸机器人定位运动在空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,其特征,被设置为,初始化系统参数s1.1。3.根据权利要求1,所述胰腺与十二指肠术后康复针灸机器人定位运动在空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,其特征,被设置为,设备自检s1.2,检测正常,被设置执行下一单元操作,检测异常,被设置为报警。4.根据权利要求1,所述胰腺与十二指肠术后康复针灸机器人定位运动在空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,其特征,被设置为,神经网络控制辨识s1.3:风向信息数据、风速信息数据、航向信息数据、与本体定位信息数据等。5.根据权利要求1,所述胰腺与十二指肠术后康复针灸机器人定位运动在空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,其特征,被设置为,俯仰、横滚、偏执、保持等定位运动操作。
技术总结
本发明主要包括了智能控制体系中的人工智能方面的控制方法,其核心控制策略是基于神经网络控制与PID控制相结合的控制方法,神经网络控制,涉及了神经网络控制BP权值控制与PID控制单元。胰十二指肠术后康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制BP权值控制与PID控制策略,被设置为,俯仰、保持或停止、横滚、偏置等定位运动操作。胰腺与十二指肠术后康复针灸机器人定位运动的智能控制方法的最大优点是,能够精准的定位患者的预订空间位置,能够通过空间三维图像,实现立体重构三维空间影像。解决了精准定位患者的拟定目标穴位。为患者早日术后康复,奠定良好的治疗基础。奠定良好的治疗基础。奠定良好的治疗基础。
技术研发人员:苏军 王维斌 苏宇童 任秉银 邓忠超 南军 苏宇琦 张秋艳 张倞嘉 秦洪德
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.07.28
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。