1.本发明涉及角度测量传感器技术领域,具体涉及一种消除偏心影响的旋转梁角度监测系统。
背景技术:
2.对于在竖直平面内旋转的梁而言,获得梁与水平面的夹角θ的工作原理为利用加速度传感器测量重力加速度的分量a=gsinθ,通过加速度传感器获取a的大小进而反推得到角度θ,其本质上是采用加速度的测量代替了角度的测量。该方案得到的结果直接简洁、耐受环境广、成本较低,被广泛应用于往复式旋转梁的角度测量,如游梁式抽油机游梁的角度测量(图1所示)。
3.目前的测量方案通常采用一个单轴加速度传感器测量与旋转梁平行方向的加速度,以此作为重力加速度沿旋转梁的分量,进而得到旋转梁与水平面之间的角度。理论上,该单轴加速度传感器需置于旋转中心。这是因为若该传感器放置于非旋转中心(即偏心)位置,偏心点处测得的加速度将包含因偏心导致的附加向心加速度与切向加速度分量,若直接读取加速度数据将引入上述加速度分量带来的误差,造成角度θ测量的失真。
4.但是,如图2所示,游梁的加速度传感器一般置于梁的上表面,该部分并不通过旋转中心。况且由于工程实际的限制,加速度传感器往往无法放置于旋转中心或旋转梁本身并不通过旋转中心,因此测量结果势必产生误差。若意图精确测量梁与水平面之间的夹角,则需要考虑因加速度传感器偏心放置产生的附加加速度对测量的影响,以消除其对于结果的干扰。
技术实现要素:
5.为了解决上述现有技术存在的问题,本发明的目的在于提供一种消除偏心影响的旋转梁角度监测系统,通过多个两轴加速度传感器测量旋转梁上水平方向以及垂直方向的加速度数值,对得到的数值进行计算,消除向心加速度以及切向加速度的影响,从而获得准确的旋转梁角度数值。
6.为达到以上目的,本发明采用如下技术方案:
7.一种消除偏心影响的旋转梁角度监测系统,包括加速度传感器系统1,与加速度传感器系统1依次连接的信号放大调理电路2和计算机3;所述加速度传感器系统1根据工况不同包括放置在旋转梁上的结构相同的两个或三个两轴加速度传感器;信号放大调理电路2对两轴加速度传感器测量的加速度信号进行滤波及放大处理,再将处理后的结果输入到计算机3进行求解,以获得角度-时间曲线,实现对梁的偏转角的实时监测,消除因加速度传感器偏心放置引起的附加向心加速度或切向加速度造成旋转梁水平夹角测量失真的影响。
8.所述旋转梁的旋转中心应可测量且位置固定。
9.所述两轴加速度传感器的测量方向为:1)与旋转梁平行方向且指向相同;2)与旋转梁垂直方向且指向相同。
10.根据使用场景不同,该系统设计为两种工况;对于旋转梁表面光滑、无缺陷的情况,采用工况一,即采用三个两轴加速度传感器,工况一计算参数少,精度高,但对安装位置要求高;对于旋转梁表面不光滑、缺陷损伤部位多的情况,采用工况二,即采用两个两轴加速度传感器,工况二对安装位置要求低,但是计算参数多,精度低。
11.工况一中,布置三个两轴加速度传感器,第一两轴加速度传感器、第二两轴加速度传感器、第三两轴加速度传感器依次沿旋转梁等距放置;其中,第二两轴加速度传感器中心位于旋转梁的旋转中心到旋转梁的垂足处,第一两轴加速度传感器、第二两轴加速度传感器、第三两轴加速度传感器在旋转梁平行方向的读数分别为a
1b
、a
2b
、a
3b
,垂直方向的读数分别为a
1n
、a
2n
、a
3n
,当地重力加速度为g,旋转梁与水平面之间的角度θ满足以下关系:
12.工况二中,布置两个两轴加速度传感器,两个两轴加速度传感器可放置于旋转梁上任意位置,两个两轴加速度传感器之间的距离l、旋转梁的旋转中心到旋转梁的距离d可测量;两个两轴加速度传感器在旋转梁平行方向的读数分别为a
1b
、a
2b
,垂直方向的读数分别为a
1n
、a
2n
,当地重力加速度为g,旋转梁与水平面之间的角度θ满足以下关系:
13.本发明和现有技术相比,具有如下优点:
14.1)本发明系统由加速度传感器系统、信号放大调理电路、计算机构成,两轴加速度传感器将加速度信号输出到信号放大调理电路中,由该部分对加速度信号进行滤波以及放大并输出,而后经过计算机处理得到角度数值。该系统可消除因旋转梁旋转产生的附加向心加速度以及切向加速度,提高了旋转梁角度的测量精度。
15.2)相较于传统的单轴加速度测量方法,本发明的两轴加速度传感器不需要强制放置于旋转中心,放置位置更加灵活。
16.3)本发明采用测量重力加速度分量的方法代替了直接的角度测量,当角度变化较小(1
°
范围)时,加速度传感器的变化可以达到数十至数百mg量级,提高了测量的精度。
17.总之,本发明能够消除因加速度传感器偏心放置引起的附加向心加速度或切向加速度造成旋转梁水平夹角测量失真的影响,能够得到准确的角度—时间关系曲线,并实现旋转梁偏转角的实时监测。
附图说明
18.图1为游梁式抽油机实际工作图。
19.图2为游梁式抽油机结构与简化后的旋转梁与旋转中心示意图。
20.图3为本发明传感器监测系统结构示意图。
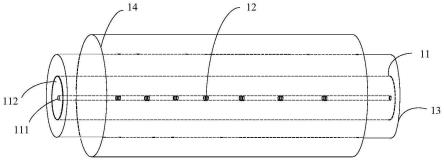
21.图4为工况一中两轴加速度传感器安装位置图。
22.图5为工况一中对第一传感器所处位置的加速度分析图。
23.图6为工况一中对第二传感器所处位置的加速度分析图。
24.图7为工况一中对第三传感器所处位置的加速度分析图。
25.图8为工况二中两轴加速度传感器安装位置图。
26.图9为工况二中对第一传感器所处位置的加速度分析图。
27.图10为工况二中对第二传感器所处位置的加速度分析图。
具体实施方式
28.以下结合附图及具体实施例,对本发明作进一步的详细描述。
29.如图3所示,一种消除偏心影响的旋转梁角度监测系统。包括加速度传感器系统(1)(根据工况不同可放置两个或三个两轴加速度传感器),信号放大调理电路(2)与计算机(3)。传感器输出加速度信号,经放大调理电路进行滤波、放大后输出到计算机进行数值计算,计算机可实时显示梁的偏转角度。
30.作为本发明的优选实施方式,旋转梁的旋转中心应可测量且位置固定。
31.作为本发明的优选实施方式,所述传感器结构相同,均为两轴加速度传感器,传感器量程应于测量过程的最大加速度值匹配。
32.作为本发明的优选实施方式,所有两轴加速度传感器的测量方向为:1)与旋转梁平行方向且指向相同;2)与旋转梁垂直方向且指向相同。
33.作为本发明的优选实施方式,所述信号放大调理电路应与传感器输出相匹配。
34.作为本发明的优选实施方式,根据使用场景不同,该系统可设计为两种工况。工况一中需采用三个传感器,计算参数较少,精度更高,但对安装位置有较高要求;工况二中仅采用两个传感器,降低了对安装位置的要求,但是计算参数较多,精度较低。总之,工况一适用于梁表面情况良好、无缺陷的情况;工况二适用于梁表面条件较差、缺陷损伤部位较多的情况。
35.作为本发明的优选实施方式,工况一中,系统布置三个两轴传感器,第一、第二、第三加速度传感器之间应依次沿旋转梁等距放置。其中,第二加速度传感器中心应位于旋转中心到旋转梁的垂足处。第一、第二、第三传感器在梁平行方向的读数为a
1b
、a
2b
、a
3b
,垂直方向的读数为a
1n
、a
2n
、a
3n
,当地重力加速度为g,旋转梁与水平面之间的角度θ满足以下关系:
36.作为本发明的优选实施方式,工况二中,系统布置两个两轴传感器,传感器可放置于梁上任意点,传感器之间的距离l、旋转中心到梁的距离d可测量。第一、第二传感器在梁平行方向的读数为a
1b
、a
2b
,垂直方向的读数为a
1n
、a
2n
,当地重力加速度为g,旋转梁与水平面之间的角度θ满足以下关系:
37.不同工况下加速度-角度转换公式的推导过程如下:
38.工况一:
39.如图4所示:假设旋转梁绕o点以角速度ω、角加速度α旋转。旋转梁与水平面夹角为θ。第一、第二、第三两轴加速度传感器分别置于a、b、c点。其几何关系为:a、b、c点均位于旋转梁上,a、c与o点之间的连线构成等腰三角形,且满足oa=oc=r,b点点位于a点与c点之间,且满足ab=bc=d,ob=h。a点、c点到o点的连线与旋转梁法线的夹角均为β。
40.如图5、图6和图7所示,对三个两轴加速度传感器进行受力分析:其均受到垂直于旋转平面的支持力,自身重力,以及与旋转梁之间的黏着力作用,与旋转梁之间相对静止。两轴加速度传感器共受到三个加速度作用:(1)重力加速度g,其可分解为沿平面方向的gb与法线方向的gn;(2)切向加速度a
τ
;(3)向心加速度ac。
41.a
1b
、a
2b
、a
3b
分别为第一、第二、第三两轴加速度传感器在旋转梁水平方向的加速度;a
1n
、a
2n
、a
3n
分别为第一、第二、第三两轴加速度传感器在旋转梁法线方向的加速度。
42.如图5所示,第一两轴加速度传感器维持平衡状态,在旋转梁水平以及法线方向需满足的条件为:
43.gb=a
1τ
cosβ a
1c sinβ a
1b
44.gn=a
1τ
sinβ-a
1c cosβ a
1n
45.如图6所示,第二两轴加速度传感器维持平衡状态,在旋转梁水平以及法线方向需满足的条件为:
46.gb=a
2τ
a
2b
47.gn=-a
2c
a
2n
48.如图7所示,第三两轴加速度传感器维持平衡状态,在旋转梁水平以及法线方向需满足的条件为:
49.gb=a
3τ
cosβ-a
3c sinβ a
3b
50.gn=-a
3τ
sinβ-a
3c cosβ a
3n
51.由力学基本关系将切向加速度与向心加速度公式展开:
52.a
1c
=a
3c
=ω2r
53.a
2c
=ω2h
54.a
1τ
=a
3τ
=αr
55.a
2τ
=αh
56.由几何关系:
57.h=r
·
cosβ
58.联立上述方程:
59.a
1b-a
2b
=a
2b-a
3b
=-ω2r sinβ
60.a
1n-a
2n
=a
2n-a
3n
=-αr sinβ
61.展开第二传感器的平衡方程:
62.g sinθ=αh a
2b
63.g cosθ=-ω2h a
2n
64.联立以上方程,经整理得:
[0065][0066]
工况二:
[0067]
如图8所示:假设旋转梁绕o点以角速度ω、角加速度α旋转。旋转梁与水平面夹角为θ。第一、第二两轴加速度传感器分别置于p、q点。其中o点到旋转梁的距离为h,po长度记为p,连线与梁夹角为β1;qo长度为q,与梁夹角记为β2。
[0068]
两轴加速度传感器的受力分析与工况一相同,如图9、10所示。
[0069]a1b
、a
2b
分别为第一、第二两轴加速度传感器测得梁水平方向的加速度;a
1n
、a
2n
分别为第一、第二两轴加速度传感器测得梁法线方向的加速度。
[0070]
第一两轴加速度传感器在两个方向需满足的条件为:
[0071]
gb=a
1τ
sinβ1 a
1c cosβ1 a
1b
[0072]gn
=a
1τ
cosβ
1-a
1c sinβ1 a
1n
[0073]
第二两轴加速度传感器在两个方向需满足的条件为:
[0074]
gb=a
2τ
sinβ2 a
2c cosβ2 a
2b
[0075]gn
=a
2τ
cosβ
2-a
2c sinβ2 a
2n
[0076]
由切向力与向心力的基本公式:
[0077]a1c
=ω2p,a
2c
=ω2q
[0078]a1τ
=αp,a
2τ
=αq
[0079]
将上式代入几何关系,可化简为:
[0080]a2b-a
1b
=ω2d
[0081]a2n-a
1n
=αd
[0082]
整理后带入第一两轴加速度传感器法向条件方程:
[0083][0084]
上述两种工况的结果方程均为超越方程,获得θ角的理论解较为困难,但可通过计算机求解方程以获得数值解,进一步获得角度θ的数据。
[0085]
由于加速度传感器较为敏感,若直接使用输出数据会造成较大的误差。因此,需要采用信号放大调理电路对传感器输出信号进行滤波以及放大,再将处理后的结果输入到计算机进行求解,以获得精确的角度-时间曲线,实现对梁的偏转角的实时监测。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。