技术特征:
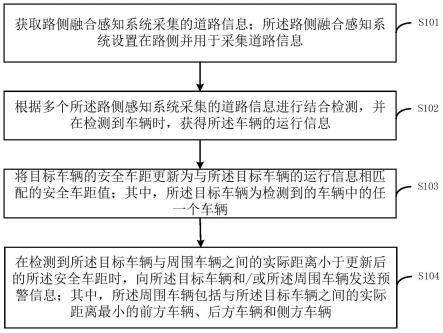
1.一种车辆预警方法,其特征在于,所述方法包括:获取路侧融合感知系统采集的道路信息;所述路侧融合感知系统设置在路侧并用于采集道路信息;根据多个所述路侧感知系统采集的道路信息进行结合检测,并在检测到车辆时,获得所述车辆的运行信息;将目标车辆的安全车距更新为与所述目标车辆的运行信息相匹配的安全车距值;其中,所述目标车辆为检测到的车辆中的任一个车辆;在检测到所述目标车辆与周围车辆之间的实际距离小于更新后的所述安全车距时,向所述目标车辆和/或所述周围车辆发送预警信息;其中,所述周围车辆包括与所述目标车辆之间的实际距离最小的前方车辆、后方车辆和侧方车辆。2.根据权利要求1所述的车辆预警方法,其特征在于,所述路侧融合感知系统包括激光雷达传感器和至少一个相机;所述获取路侧融合感知系统采集的道路信息,包括:获取所述激光雷达采集的激光雷达数据;获取所述至少一个相机采集的视频数据;将所述激光雷达数据与所述视频数据进行配准;根据配准后的激光雷达数据与所述视频数据进行融合处理,得到所述采集的道路信息。3.根据权利要求2所述的车辆预警方法,其特征在于,所述根据多个所述路侧感知系统采集的道路信息进行结合检测,并在检测到车辆时,获得所述车辆的运行信息,包括:对多个所述路侧感知系统采集的道路信息中的视频数据进行结合检测,并在检测到车辆时,对检测到的车辆进行车牌识别,获得车辆的车牌信息;对多个所述路侧感知系统采集的道路信息中的激光雷达数据检测车辆的位置、速度和轮廓,获得车辆的位置信息、车速信息和车辆类型信息;将同一车辆的车牌信息、位置信息、车速信息和车辆类型信息进行关联,得到所述车辆的运行信息。4.根据权利要求3所述的车辆预警方法,其特征在于,所述向所述目标车辆和/或所述周围车辆发送预警信息,包括:根据所述目标车辆及所述周围车辆的车牌信息进行定位,根据定位结果通过v2x技术向所述目标车辆和/或所述周围车辆发送预警信息。5.根据权利要求1至4任一项所述的车辆预警方法,其特征在于,所述方法还包括:在检测到同一车道中预设有效范围内中,存在目标车辆与周围车辆之间的实际距离小于更新后的所述安全车距的目标车辆数量达到预设阈值时,向对应的预警范围内的所有车辆发送预警信息。6.根据权利要求3所述的车辆预警方法,其特征在于,所述路侧融合感知系统还包括路面能见度传感器;所述将目标车辆的安全车距更新为与所述目标车辆的运行信息相匹配的安全车距值,包括:获取所述路面能见度传感器采集的能见度值;
所述将目标车辆的安全车距更新为与所述能见度值、所述目标车辆的车辆类型、所述目标车辆的运行速度均匹配的安全车距值。7.根据权利要求6所述的车辆预警方法,其特征在于,所述将目标车辆的安全车距更新为与所述能见度值、所述目标车辆的车辆类型、所述目标车辆的运行速度均匹配的安全车距值,包括:在所述能见度值大于第一能见度阈值,且所述目标车辆的车速大于第一车速阈值时,将目标车辆的前后安全车距更新为与所述目标车辆的车辆类型对应的第一前后安全车距值;在所述能见度值大于第一能见度阈值,且所述目标车辆的车速小于或等于第一车速阈值时,将目标车辆的前后安全车距更新为与目标车辆的车辆类型对应的第二前后安全车距值;其中,所述第二前后安全车距小于所述第一前后安全车距;在所述能见度小于或等于所述第一能见度阈值,且所述目标车辆的车速大于第二车速阈值时,将目标车辆的前后安全车距更新为与所述目标车辆的车辆类型对应的第一前后安全车距值;其中,所述第二车速阈值小于所述第一车速阈值;在所述能见度小于或等于所述第一能见度阈值,且所述目标车辆的车速小于或等于第二车速阈值时,将目标车辆的前后安全车距更新为与目标车辆的车辆类型对应的第二前后安全车距值;在所述目标车辆的车速大于第二车速阈值时,将目标车辆的侧方安全车距更新为与所述目标车辆的车辆类型对应的第一侧方安全车距值;在所述目标车辆的车速小于或等于第二车速阈值时,将目标车辆的侧方安全车距更新为与所述目标车辆的车辆类型对应的第二侧方安全车距值;其中,所述第二侧方安全车距小于所述第一侧方安全车距值。8.根据权利要求6所述的车辆预警方法,其特征在于,所述路侧融合感知系统还包括路面状态传感器;所述将目标车辆的安全车距更新为与所述目标车辆的运行信息相匹配的安全车距值,包括:获取所述路面状态传感器采集的路面状态;所述路面状态包括干燥状态、潮湿状态和结冰状态;所述将目标车辆的安全车距更新为与所述路面状态、所述能见度值、所述目标车辆的车辆类型、所述目标车辆的运行速度均匹配的安全车距值。9.一种车辆预警装置,其特征在于,包括:获取模块,用于获取路侧融合感知系统采集的道路信息;所述路侧融合感知系统设置在路侧并用于采集道路信息;检测模块,用于根据多个所述路侧感知系统采集的道路信息进行结合检测,并在检测到车辆时,获得所述车辆的运行信息;安全车距更新模块,用于将目标车辆的安全车距更新为与所述目标车辆的运行信息相匹配的安全车距值;其中,所述目标车辆为检测到的车辆中的任一个车辆;第一预警模块,用于在检测到所述目标车辆与周围车辆之间的实际距离小于更新后的所述安全车距时,向所述目标车辆和/或所述周围车辆发送预警信息;其中,所述周围车辆
包括距离所述目标车辆最近的前方车辆、后方车辆和侧方车辆。10.一种计算设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至8任一项所述的方法。
技术总结
本申请适用于车辆技术领域,提供了一种车辆预警方法、装置及计算设备,其中,方法包括:获取路侧融合感知系统采集的道路信息;路侧融合感知系统设置在路侧并用于采集道路信息;根据多个路侧感知系统采集的道路信息进行结合检测,并在检测到车辆时,获得车辆的运行信息;将目标车辆的安全车距更新为与目标车辆的运行信息相匹配的安全车距值;其中,目标车辆为检测到的车辆中的任一个车辆;在检测到目标车辆与周围车辆之间的实际距离小于更新后的所述安全车距时,向目标车辆和/或所述周围车辆发送预警信息;其中,周围车辆包括与所述目标车辆之间的实际距离最小的前方车辆、后方车辆和侧方车辆。可准确有效的对车辆进行预警。可准确有效的对车辆进行预警。可准确有效的对车辆进行预警。
技术研发人员:梁延禹 关喜嘉 王邓江 马冰 邓永强
受保护的技术使用者:北京万集科技股份有限公司
技术研发日:2021.05.10
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。