技术特征:
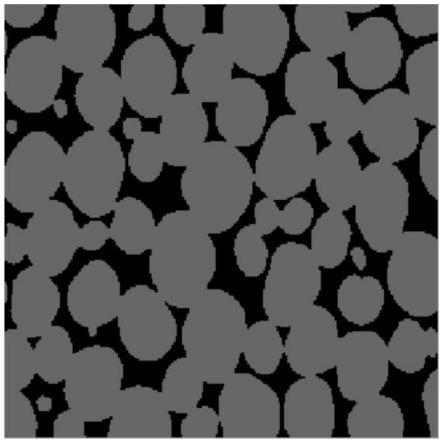
1.一种岩屑岩心孔隙度快速测定方法,其特征在于,包括以下步骤:s1、在目标岩心处放置矩形标识,并对该矩形标识处进行图像拍摄;s2、筛选若干张清晰度满足阈值的图像;s3、对图像进行消噪处理;s4、采用fcm算法对消噪处理后的目标岩心图像进行二值化处理;s5、采用sobel算子对目标岩心图像中的孔隙边缘轮廓进行加强,并采用hog特征提取孔隙所在区域的特征;s6、采用大津法阈值分割算法对孔隙所在区域进行分割,获得岩心孔隙图像;s7、对岩心孔隙图像进行圆形等效分布,并计算等效分布后岩心孔隙的面积;s8、根据计算所得的岩心孔隙面积,估算岩心孔隙度。2.根据权利要求1所述的岩屑岩心孔隙度快速测定方法,其特征在于,所述步骤s3具体包括:从图像中获取任意一个像素点x(i,j),以该像素点为中心,获得邻域s,计算邻域s内全部像素的均值m、均方差σ,计算x(i,j)与均值m之间的偏差σ
x
,若在邻域s内至少一个以上的像素点y(i,j)与x(i,j)间的偏差σ
y
<σ
x
,则x(i,j)为图像的边缘点,否则x(i,j)为噪声点。3.根据权利要求2所述的岩屑岩心孔隙度快速测定方法,其特征在于:所述步骤s4具体包括:s4.1、将每个像素点对象x
j
(1≤j≤q)分配给c个类别,使用c
×
q的隶属矩阵u={u
ij
}表示对象与类别之间的隶属关系,则x的模糊划分空间为:其中,u
ij
为第j个像素点对象属于第i个类的隶属程度;s4.2、给定x={x1,x2,
…
,x
q
}为待聚类数字图像所有像素点灰度值的数据集,聚类中心v={v1,v2,
…
,v
c
},定义目标函数j
m
为:其中,m为控制模糊程度的加权指数,当m趋于1时,分区接近硬聚类;m趋于无穷大时,分区将产生分离得很差的集群;|x
j-v
i
|为第j个像素点灰度值与第i个聚类中心之间的欧几里得距离;s4.3、目标函数对u
ij
和v
i
进行一阶求导,当u
ij
和v
i
的一阶导数为零时,隶属矩阵和聚类中心更新为:
4.根据权利要求3所述的岩屑岩心孔隙度快速测定方法,其特征在于:所述步骤s5具体包括:s5.1、对图像的目标岩心区域进行灰度处理;s5.2、采用sobel算子对目标岩心区域中的孔隙边缘轮廓进行加强;s5.3、采用hough变换对孔隙进行定位,将图像空间中共线的点映射到参数空间,利用局部峰值检测出直线参数后再映射到图像空间,得到图像直线检测结果,并得到孔隙的边缘;s5.4、采用hog特征提取方法对孔隙所在的区域进行特征提取,以得到孔隙在目标区域的具体位置。5.根据权利要求1所述的岩屑岩心孔隙度快速测定方法,其特征在于,所述步骤s6中大津法阈值中的阈值t计算包括:s6.1、将图像中的孔隙部分作为前景部分,图像中的其它部分为背景部分;s6.2、计算图像中前景像素点所占比例ω0和背景像素点所占比例ω1;景像素点所占比例ω0和背景像素点所占比例ω1;其中,图像的大小为m*n,n0为图像中像素的灰度值小于阈值t的像素点个数,n1为像素点大于阈值t的像素点个数;s6.3、计算图像的总平均灰度为μ:μ=w0*μ0 w1*μ1其中,μ0为前景像素点的平均灰度,μ1为背景像素点的平均灰度;s6.4、计算图像前景部分和背景部分的内间方差g:g=w0w1(μ0-μ1)2s6.5、采用遍历方法得到内间方差g的最大值即为阈值t。
技术总结
本发明公开了一种岩屑岩心孔隙度快速测定方法,包括在目标岩心处放置矩形标识,并对该矩形标识处进行图像拍摄;筛选若干张清晰度满足阈值的图像;对图像进行消噪处理;采用FCM算法对消噪处理后的目标岩心图像进行二值化处理;采用Sobel算子对目标岩心图像中的孔隙边缘轮廓进行加强,并采用HOG特征提取孔隙所在区域的特征;采用大津法阈值分割算法对孔隙所在区域进行分割,获得岩心孔隙图像;对岩心孔隙图像进行圆形等效分布,并计算等效分布后岩心孔隙的面积;根据计算所得的岩心孔隙面积,估算岩心孔隙度。本发明可实现现场岩心孔隙度的快速评估,对于现场的施工执行具有较高的指导价值。的指导价值。的指导价值。
技术研发人员:斯敏贵
受保护的技术使用者:四川菲尔检测技术有限公司
技术研发日:2022.08.25
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。