1.本发明涉及智能汽车领域,更具体地,涉及一种使平头车变长头车以保护行 人的智能装置。
背景技术:
2.现有的大型平头车(公交车、泥头车、货车、客运车)的车头形状采用的都 是平头模式,但是在发生人车碰撞事故的过程中,由于没有给行人一个很好的缓 冲区域,使得行人直接被车头所撞飞,造成很严重的人车碰撞损伤和人地碰撞损 伤,甚至撞飞后可能会造成进一步碾压行人的现象发生。
3.现有的大型平头车(公交车、泥头车、货车、客运车)上,站在驾驶室的角 度依然存在一定的视野盲区,驾驶员可能未注意前方行人,导致交通事故的发生, 如果能够充分利用视野盲区来填补一种保护装置,能够提高盲区利用率,还能保 护行人。
4.现有的大型平头车(公交车、泥头车、货车、客运车)上装有自适应巡航控 制系统,能够自动控制车速,结合此想法,设计出车辆控制中心,按照行人与车 头距离及行人所在车头前装置的区域来定义控制方式,将其与本装置结合,可以 达到自动控制车辆运动的目的,以减小驾驶员在事故发生过程中无法自主判断采 用何种控制方式或采取制动控制不及时,给行人带来的更大伤害。
5.现有的大型平头车(公交车、泥头车、货车、客运车)上未装有自动紧急制 动系统aeb(autonomous emergency braking),aeb是一种汽车主动安全技术, 由测距模块、数据分析模块和执行机构模块构成,aeb系统采用雷达测出与前 车或障碍物的距离,然后利用数据分析模块所测出的距离与安全距离,报警距离 进行比较,小于报警距离时进行报警提示,小于安全距离时即使在驾驶员没来得 及踩制动踏板的情况下,aeb系统也会启动,使汽车自动制动,但现有研究表 明即使装有aeb也不能完全避免事故,基于2019年提出的通过控制车辆运动以 防护人地碰撞损伤的行人自动紧急制动系统paeb新技术的想法 (pedestrian-automatic emergency braking),paeb技术是在aeb技术的基础上进 行适当扩展,即进一步控制人车接触后0.45s左右时间段内车辆的运动,控制车 辆运动让车辆与行人共同运动一段距离,以降低人地碰撞损伤,现有的研究中还 未曾将该思路转换到具体的装置上,尤其对于平头车而言,无法提供区域使其与 行人共同运动。
6.现有的研究表明人车相互作用时间与人地碰撞损伤成负相关,若能延长人车 相互作用时间,则能大大降低人地碰撞损伤,大型平头车(公交车、泥头车、货 车、客运车)正面撞击行人时,相互作用时间极为短暂。因此,亟需一种装置作 为中介来提高人车相互作用时间。
技术实现要素:
7.为了避免平头车直接撞倒行人,甚至进一步碾压行人的现象发生及提高驾驶 视野盲区利用率,本发明设计出一种使平头车变长头车以保护行人的智能装置, 该装置包括
碰撞传感器,危险警报器,碰撞发生器和车辆控制中心,所述碰撞传 感器置于平头车车头,用于接收即将碰撞的信号;所述危险警报器置于驾驶室的 左侧,用于提醒驾驶员采取制动措施;所述碰撞发生器压缩后置于平头车车底盘 和车头前方0.1m,用于防止平头车直接撞飞或碾压行人且不阻挡车头散热;所 述车辆控制中心置于平头车车顶。
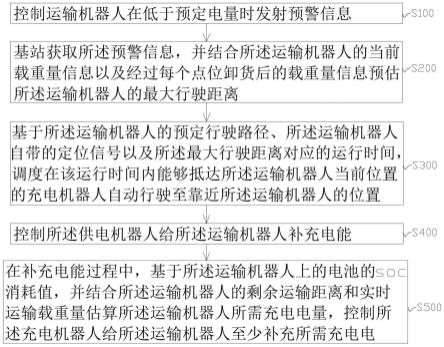
8.若碰撞传感器监测到行人处于危险距离时,危险警报器开始报警,驾驶员要 立即采取制动措施;若驾驶员立即采取制动措施,则可以及时避免碰撞发生,若 驾驶员未采取制动措施,监测到行人处于危险距离与碰撞不可避免距离之和的二 分之一时,车辆控制中心立即接管控制,根据人车间距制动车辆;若监测到行人 处于车头碰撞不可避免距离时,此时事故已不可避免,在车辆控制中心完全制动 车辆的同时碰撞发生器开始工作,首先电动伸缩滑轨(2)朝前方滑出,同时, 卡在第一支承板(13)中装有传感器的卡槽内的卡扣(5)弹出,同时,伸缩箱 (3)与固定在电动伸缩滑轨(2)的保护层(10)前端的带动下,朝前伸长,原 本连接在保护层(10)前端和第二支承板(14)上端处于松弛状态的防护网(7) 被张紧,同时可压缩的高回弹性的弧形保护层(10)从车底盘和支承保护板(9) 之间的间隙被抽出,支承保护板(9)通过保护层(10)和电动伸缩滑轨(2)的 带动下朝前方滑出,如上所述该装置已从压缩状态变为伸长状态,所述车辆控制 步骤如下:
9.s101:若监测到事故不可避免时,车辆控制中心完全制动车辆,待行人的腿 部与保护层(10)前端相撞时,继续完全制动至行人的头部落在防护网(7)上 的t1时刻;
10.s102:若监测到行人的胸部处于纵向中心线左右各四分之一车宽w内时, 车辆控制中心控制好当前车速使平头车前的装置与抓住该装置上防护网的行人 共同向前运动10m;若同时监测到行人的腿部处于纵向中心线左右各四分之一车 宽w内时,车辆控制中心立即完全制动车辆至静止;若未监测到行人的腿部处 于纵向中心线左右各四分之一车宽w时,则车辆控制中心完全制动车辆至静止, 行人将抓住防护网一同随车辆静止;
11.s103:若监测到行人的胸部处于车头左右侧边线四分之一车宽w内时,车 辆控制中心控制当前车速使平头车前的装置与抓住该装置上防护网(7)的行人 共同向前运动10m至步骤s102;
12.若进行s102步骤时,监测到行人的胸部处于纵向中心线左右各四分之一车 宽w内时,车辆控制中心自动控制当前车速使平头车前的装置与抓住该装置上 防护网(7)的行人共同向前运动10m;若同时监测到行人的腿部处于纵向中心 线左右各四分之一车宽w内时,此时,智能解网钩(6)松开,防护网(7)掉 落在保护层(10)上,行人落在保护层(10)上,由于行人的重力作用,配合第 一阻尼铰链(11)两端滚子在伸缩滑轨(8)内的缓慢滚动,车辆控制中心完全 制动车辆至静止的过程中,支承保护板(9)会滑到地面上,由于惯性作用还将 往前方滑动一段距离,支承保护板(9)的底面与地面摩擦,车速所带来的冲击 也会大大减小,滑行一段距离后静止或行人在平面滑行中上被抛出,相比于平头 车车头的直接相撞,有效减小了人车碰撞损伤和人地碰撞损伤;若未监测到行人 的腿部处于纵向中心线左右各四分之一车宽w时,则车辆控制中心继续完全制 动车辆至静止,行人将抓住防护网(7)一同随车辆静止;
13.若进行s103步骤时,监测到行人的胸部处于车头左右侧边线四分之一车宽w内时,车辆控制中心控制当前车速使平头车前的装置与抓住该装置上防护网(7) 的行人共同向前运动10m至步骤s102;若车辆控制中心完全制动车辆10m时, 监测到行人未实现s102步
骤,即行人未自主移动到s102步骤中所指定区域内, 此时,车辆控制中心完全制动车辆至静止,在车辆控制中心完全制动的同时,智 能钩(15)松开,伸缩箱(3)外侧的可伸缩双层材料板通过可伸缩旋转铰链(16) 旋转到地面上,供行人的腿部安放,车辆控制中心继续完全制动车辆至静止,行 人将脚踩双层材料板,手抓防护网(7)随同车辆静止。
14.进一步地,车辆控制中心置于平头车车顶,以获得良好的信号接收范围,能 够及时对车辆进行控制。
15.进一步地,步骤s101中的t1指的是行人头部与防护网第一次碰撞接触时刻, 车辆完全制动是为了降低车速,减小碰撞带来的冲击。
16.进一步地,步骤s102中,车辆控制中心完全制动车辆至静止的过程中,支 承保护板会滑到地面上,由于惯性作用还将往前方滑动一段距离,这个过程中, 支承保护板和保护层及保护层上的行人与平头车车头前装置分离后,不会被车所 撞击到,在刚分离后,即使分离后的部分与车具有相同的加速度,但支承保护板 与地面的摩擦力要小于平头车轮胎与地面的摩擦力,平头车不会追上分离部分。
17.进一步地,碰撞传感器采用常规的激光传感器,实现无接触远距离测量行人 距车头位置的距离,碰撞传感器置于平头车车头前的车牌处,由于激光传感器的 尺寸并不大,不会遮挡车牌号的同时,又不会被该装置所遮挡,危险警报器采用 常规的感应警报器,当碰撞传感器感应到行人处于危险距离时,将信号传给危险 警报器,危险警报器开始报警。
18.进一步地,该装置处于车头前0.1m,也即第一支承板的背面与平头车车头 之间保持0.1m距离,一方面不阻挡车头散热的同时,还能使处在压缩状态下装 置的前端到车头之间的距离最小,使得装置不凸出过多的空间,而保持原有平头 的形状,另一方面能够使得车牌和灯不完全被该装置所遮挡,同时,还便于拆卸 装置,方便后期的维修。
19.进一步地,在行人处于危险距离与碰撞不可避免距离之和的二分之一的距离 时,进行人车间距制动车辆,车辆控制中心接管车辆控制,用车辆制动程度k 进行车辆制动;若行人避开,车辆控制中心关闭;若行人未避开,则进入人车碰 撞不可避免阶段,提前降低了车速,为下一阶段的完全制动车辆提供一个舒适的 缓冲时间区域,会减小因速度太快而立即制动带来的安全性问题,并且能提高乘 员的舒适性。
20.进一步地,根据行人的大众身高,将伸长状态的防护网定为2m长,与车头 同宽,装置压缩后的厚度定为0.2m,即装置的保护层前端到车头的距离为0.3m, 第二支撑板的高度到车头挡风玻璃下沿处,以充分利用车头探头罩盖高度的同时, 又不遮挡挡风玻璃,为驾驶员提供良好视野。
21.进一步地,平头车的左右大灯几乎各占到整个车头宽度w的四分之一宽, 在设计伸缩箱时,开孔的大小就需要考虑到不遮挡车灯的情况,也即一个伸缩箱 的横向宽度需要达到至少四分之一车宽w的宽度,而纵向中心线左右各四分之 一车宽w的范围内是可压缩的保护层;若监测到行人的胸部和腿部均处在纵向 中心线左右各四分之一车宽w内时,智能解网钩松开,防护网向下掉落的同时, 行人会在自身重心的作用下很好的落在保护层上,而不至于落在伸缩箱的位置, 一方面行人在防护网上下落时与伸缩箱碰撞会带来严重的碰撞伤害,另一方面伸 缩箱无可抓物提供,给行人带来危险隐患,严重的情况则行人可能从两侧飞出, 而在车头左右侧边线四分之一车宽w的伸缩箱上会在一层防护网的作用下,不 会与伸缩箱发生严重的碰撞,降低了因行人与伸缩箱的碰撞而带来的碰撞伤害; 若
监测到行人的胸部位于车头左右侧边线四分之一车宽w内时,一种是通过车 辆控制中心控制当前车速使平头车前的装置与抓住该装置上防护网的行人共同 向前运动10m,目的是为了给行人提供可以朝着纵向中心线左右各四分之一车宽 w范围移动的时间;如若行人在这段时间未朝着纵向中心线左右各四分之一车宽 w范围移动,则车辆控制中心将从控制当前车速转为完全制动车辆至静止,在车 辆控制中心完全制动车辆的同时,两伸缩箱的外侧双层材料板的下端通过可伸缩 旋转铰链的旋转转到地面上,可供行人的腿部安放,以此避免了行人长时间处于 手抓防护网而出现体力不支的情况发生,待行人的脚部放在双层材料板上后,行 人此时抓住防护网时将会节省很多体力,疲劳感将会降低。
22.进一步地,行人处于s102状态时,智能解网钩上的钩子松开,防护网脱落, 行人落在凹形保护层上,行人的重力作用配合着第一阻尼铰链两侧滚子在伸缩滑 轨内的缓慢滚动,支承防护板和通过强粘结剂连接在一起的保护层及抓着保护层 上端孔的行人开始共同沿着伸缩滑轨的轨道滑动,设置好车辆控制中心完全制动 车辆至静止的同时,支承保护板刚好已完全从斜面滑向地面,支承保护板触地面 与地面摩擦,产生阻力,起到一定的减速效果,不仅防止了车头与行人的直接碰 撞,大大减小行人受伤的程度,还防止了行人被撞后遭受进一步车轮碾压的效果。
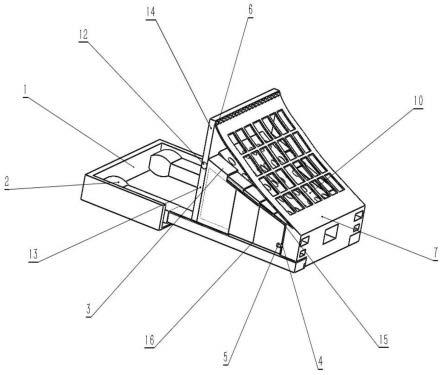
23.进一步地,所述碰撞发生器包括:防尘罩(1)、电动伸缩滑轨(2)、伸缩箱 (3)、旋转铰链(4)、卡扣(5)、智能解网钩(6)、防护网(7)、伸缩滑轨(8)、 支承保护板(9)、保护层(10)、第一阻尼铰链(11)、第二阻尼铰链(12)、第 一支承板(13)、第二支承板(14)、智能钩(15)和可伸缩旋转铰链(16),所 述防尘罩(1)固定在平头车车底盘,所述电动伸缩滑轨(2)固定在所述防尘罩 (1)内的车底盘下,所述伸缩箱(3)固定在所述电动伸缩滑轨(2)最外层凸 出的上表面,且分布在车头的两侧,所述卡扣(5)通过所述旋转铰链(4)与所 述伸缩箱(3)相连,并且能够扣入所述第一支承板(13)的智能卡槽内,所述 智能解网钩(6)固定在所述第二支承板(14)的上端,所述防护网(7)一端固 定在所述保护层(10)前端和所述伸缩箱(3)的前端,另一端卡在所述智能解 网钩(6)的钩子上,所述伸缩滑轨(8)在所述电动伸缩滑轨(2)的两侧轨道 处,所述支承保护板(9)通过所述第一阻尼铰链(11)与所述两电动伸缩滑轨 (2)相连,同时需要将所述支承保护板(9)内连接的第一阻尼铰链(11)的两 端滚子嵌入到所述伸缩滑轨(8)内,所述保护层(10)通过某种强粘结剂固定 在所述支承保护板(9)上,所述第一支承板(13)固定在所述电动伸缩滑轨(2) 最外层凸出的上表面并与左右两侧伸缩箱(3)固定,所述第二支承板(14)通 过所述第二阻尼铰链(12)与所述第一支承板(13)相连,所述智能钩(15)固 定在伸缩箱(3)两外侧双层材料板的上端,所述伸缩箱(3)和所述保护层(10) 与水平面的夹角均为θ,135
°
<θ<150
°
,所述支承保护板(9)与水平面的夹角 为α,160
°
<α<180
°
,所述第二支承板(14)与水平面的夹角为β,100
°
<β<120
°
;
24.进一步地,对伸缩箱和保护层与水平面夹角θ限制的目的是一方面相比伸出 相同水平长度的水平装置下,能够提供接住行人更长的长度,大大缩短了水平设 计长度,一方面能够防止人的头部直接与平头车车头或挡风玻璃相撞,另一方面 能够起到一定接住行人的缓冲作用。
25.进一步地,对支承保护板与水平面夹角α限制的目的是防止支承保护板在重 力作用下向车辆运动的反方向倾斜,使人朝着车辆运动的反方向掉落,增加了受 伤的几率。
26.进一步地,对第二支承板与水平面夹角β限制的目的是在车辆制动的情况下, 在
第二阻尼铰链的旋转下,第二支承板可以搭在挡风玻璃上,在限制θ后,进一 步有效避免行人的头部直接与平头车车头或挡风玻璃相撞。
27.进一步地,支承保护板与伸缩滑轨选择第一阻尼铰链的目的是一方面能够减 缓第一阻尼铰链两端的滚子沿着电动伸缩滑轨快速滚动,造成支承保护板受到行 人的重力作用时而立刻倾斜落地,避免行人受到巨大冲击,能够提供一定的时间 间隙供驾驶员根据当时情形采取相应的车辆制动措施;
28.进一步地,设置防护网的目的是一方面能够起到一定的碰撞吸能作用,另一 方面能够给行人提供手抓物。
29.进一步地,伸缩箱能够大大减小装置的纵向尺寸,在车头左右两侧布置,大 大提高了装置弹出的效率,在伸缩箱上开孔,在装置处于压缩的状态下,能够避 免遮挡车灯,伸缩箱两外侧的可伸缩双层材料板的下端通过可伸缩旋转铰链连接 伸缩箱的底层伸缩板,可伸缩双层材料板上端通过智能钩卡在上层伸缩板上。
30.进一步地,支承保护板的厚度要小于电动伸缩滑轨厚度,以便于在之间的间 隙塞入可压缩的保护层,支承保护板在未受到行人重力作用时,不会发生倾斜, 支承保护板中的第一阻尼铰链两端的滚子与伸缩滑轨的轨道采用适当的过盈配 合,一方面在保护层前端和电动伸缩滑轨的带动下,第一阻尼铰链两端的滚子不 会自由滚动,另一方面在行人落在保护层时,能够进行缓慢的滚动,而不会快速 沿着伸缩滑轨滚动,避免行人受到巨大冲击的风险。
31.进一步地,保护层采用高回弹性材料的弧形结构,相比与平面结构更利于吸 收行人撞击时的冲击能量,前端开孔是为了避免遮挡车牌,中间开孔是为了避免 遮挡车标,上端开孔是方便行人抓住,形成继防护网后的二次手抓物保护,同时, 大量的孔能够节省出大量压缩空间,能够更好的塞入支承保护板和车底盘之间的 间隙之中。
32.进一步地,第一支承板开圆孔是为了避免遮挡车标,左右两侧各开两孔是为 了避免遮挡车灯,同时第一支承板背面左右两侧需要开卡槽,装入传感器,便于 电动伸缩滑轨的运行的同时,卡扣能够第一时间弹出。
33.进一步地,设置伸缩滑轨的目的在于当行人落在保护层上时,由于重力作用, 支承保护板发生倾斜,在第一阻尼铰链左右两侧的滚子沿着伸缩滑轨滚动时,使 得支承保护板在伸缩滑轨下滑落,行人能够抓住保护层上端的孔,在支承保护板 的带动及车辆控制中心完全制动车辆至静止的过程中,支承保护板和保护层及抓 住保护层上端孔的行人能够滑到地面上,由于支承保护板和保护层的高度高于车 底距离地面的高度,行人不会掉入车底,防止行人遭到平头车的碾压。
34.与现有技术相比,本发明的有益效果如下:
35.本装置结合车辆控制中心,对车辆进行自动制动控制,若碰撞传感器监测到 行人处于危险距离时,危险警报器开始报警,驾驶员要立即采取制动措施;若驾 驶员立即采取制动措施,则可以及时避免碰撞发生;若驾驶员未采取制动措施, 监测到行人处于危险距离与碰撞不可避免距离之和的二分之一时,车辆控制中心 立即接管控制,根据人车间距制动车辆;同时若监测到行人处于车头碰撞不可避 免距离时,此时事故已不可避免,同时碰撞发生器开始工作,第一种情况是行人 提前被保护层前端撞倒在防护网上和保护层上,防护网的网格间隙和保护层的孔 间隙为行人提供手抓物,行人落在保护层上,由于自身重力
作用,配合第一阻尼 铰链两端滚子在伸缩滑轨内的缓慢滚动,配合着车辆完全制动的措施,支承保护 板会滑到地面上,由于惯性作用还将往前方滑动一段距离,支承保护板的触地面 能够增大摩擦,车速所带来的冲击也大大减小,第二种情况是行人提前被保护层 的两侧面前端撞倒在防护网上,则行人可以通过手抓防护网,脚踩双层材料板的 方式最终被保护起来或者通过车辆控制中心控制当前速度使平头车上的该装置 与行人共同向前运动一段距离,供行人爬到纵向中心线左右各四分之一车宽w 的范围后,再根据第一种情况以保护行人。本装置有效地避免了行人直接被平头 车撞飞时带来的严重人车碰撞损伤和人地碰撞损伤以及甚至进一步碾压行人的 风险,同时又充分提高了平头车的视野盲区利用率,将视野盲区用来布置本装置, 有效的保护了行人的安全,同时,本装置结合了最新研究的paeb技术思想和人 车相互作用时间越长,人地损伤越低的思想,装置所伸出的长度,斜面倾角的大 小都能够与汽车的发动机罩倾角相联系,能够更好的为研究如何通过控制制动降 低人地损伤防护提供新方向。
附图说明
36.图1为本装置车头纵向中心线和四分之一车宽w范围的示意图;
37.图2为本装置处于压缩状态时未装有防护网的结构示意图;
38.图3为本装置处于压缩状态时装有防护网的结构示意图;
39.图4为本装置处于伸长状态时防护网张紧时的结构示意图;
40.图5为伸缩箱压缩时与保护层前端和电动伸缩滑轨衔接的结构示意图;
41.图6为本装置处于伸长状态时电动伸缩滑轨与伸缩箱的衔接结构示意图;
42.图7为本装置处于伸长状态的轴侧仰视图;
43.图8为本装置处于伸长状态时电动伸缩滑轨和伸缩滑轨的结构示意图;
44.图9为支承保护板和第一阻尼铰链及凸出部分的滚子的结构示意图;
45.图10为本装置伸长时伸缩箱的结构示意图;
46.图11为智能钩的结构示意图;
47.图12为可伸缩旋转铰链结构示意图;
48.图13为伸缩箱外侧与可伸缩旋转铰链的结构示意图;
49.图14为伸缩箱两外侧可伸缩板通过可伸缩旋转铰链旋转落地的结构示意图;
50.图15为伸缩箱压缩状态时的结构示意图;
51.图16-18为伸缩部分的结构示意图;
52.图19为支承保护板所在具体位置的结构示意图;
53.图20为车与行人未处于危险距离时装置压缩状态的三维结构示意图;
54.图21为车与行人处于危险距离时装置伸长状态的三维结构示意图;
55.图22-27为碰撞发生器的工作流程图;
56.图28为各距离描述的示意图;
57.图29为该装置处于伸长状态的结构示意图;
58.图30-31为车辆控制中心和保护行人的s101-s103的流程图;
59.其中,对应的附图标记为:2-电动伸缩滑轨,3-伸缩箱,4-旋转铰链,5-卡 扣,6-智能解网钩,7-防护网,8-伸缩滑轨,9-支承保护板,10-保护层,11-第一 阻尼铰链,12-第二
阻尼铰链,13-第一支承板,14-第二支承板,15-智能钩,16
‑ꢀ
可伸缩旋转铰链。
60.其中,图1上下两条线为车头的侧边线,中间的点画线为车头的纵向中心线。
61.其中,图15所示压缩状态的伸缩箱仅为展示压缩时卡扣和伸缩箱的状态, 不代表伸缩箱和卡扣的具体长度。
62.其中,图28中序号29表示危险距离,序号30表示危险距离与碰撞不可避 免距离之和的二分之一,序号31表示碰撞不可避免距离。
63.其中,图30中行人未避开,人车处于碰撞不可避免距离时,车辆控制中心 完全制动车辆,同时,处于压缩状态的装置在与行人碰撞之前,就完成伸长。
具体实施方式
64.仅附图无法使本技术领域的人员很好的理解本发明方案,下面根据附图的示 例性,结合实施例对本发明的技术方案做进一步的说明。对本发明实施例中的技 术方案进行详细、完整地描述,所描述的实施例仅仅是本发明的一部分实施例, 而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有做出创 造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
65.实施例一
66.对某一装有所述发明装置“使平头车变长头车以保护行人的智能装置”的公 交车,该装置通过如下方式保护行人:
67.步骤s97,碰撞传感器监测到行人处于危险距离时,将信号传达给危险警报 器;
68.步骤s99,危险警报器提醒驾驶员采取制动措施,若驾驶员立即采取制动措 施,则可以及时避免碰撞发生,若驾驶员未采取制动措施,监测到行人处于危险 距离与碰撞不可避免距离之和的二分之一时,车辆控制中心立即接管控制,根据 人车间距制动车辆;
69.步骤s101,若监测到事故不可避免时,即人车处于碰撞不可避免距离时, 车辆控制中心完全制动车辆,待行人的腿部与保护层(10)前端相撞时,继续完 全制动至行人的头部落在防护网(7)上的t1时刻,在车辆控制中心完全制动车 辆的同时,碰撞发生器开始工作,电动伸缩滑轨(2)朝前方滑出,同时,卡在 第一支承板(13)中装有传感器的卡槽内的卡扣(5)弹出,同时,伸缩箱(3) 与固定在电动伸缩滑轨(2)的保护层(10)前端的带动下,朝前伸长,原本连 接在保护层(10)前端和第二支承板(14)上端处于松弛状态的防护网(7)被 张紧,同时,支承保护板(9)通过第一阻尼铰链(11)两端滚子卡在伸缩滑轨(8)上被电动伸缩滑轨(2)带动朝前运动,可压缩的高回弹性的弧形保护层(10) 从车底盘和支承保护板(9)之间的间隙被抽出;
70.步骤s102,若监测到行人的胸部处于纵向中心线左右各四分之一车宽w内 时,车辆控制中心控制当前车速使平头车前的装置与抓住该装置上防护网的行人 共同向前运动10m;若同时监测到行人的腿部处于纵向中心线左右各四分之一车 宽w内时,车辆控制中心完全制动车辆,此时,智能解网钩(6)松开,防护网 (7)掉落,行人落在保护层(10)上,由于行人的重力作用,配合第一阻尼铰 链(11)两端滚子在伸缩滑轨(8)内的缓慢转动,车辆控制中心完全制动车辆 至静止的过程中,支承保护板(9)会滑到地面上,由于惯性作用还将往前方滑 动一段距离,支承保护板(9)的底面与地面摩擦,车速所带来的冲击也会大大 减小,滑行一段距离后静止或行人在平面滑行中上被抛出,此时在平面中滑行的 速度已非常
小,相比于公交车车头的直接相撞,大大减小了人车碰撞损伤和人地 碰撞损伤;
71.步骤s103,若监测到行人的胸部处于车头左右侧边线四分之一车宽w内时, 车辆控制中心控制当前车速使平头车前的装置与抓住该装置上防护网(7)的行 人共同向前运动10m至步骤s102;若车辆控制中心完全制动车辆10m时,监测 到行人未实现s102步骤,即行人未自主移动到s102步骤中所指定区域内,此 时,车辆控制中心完全制动车辆至静止,在车辆控制中心完全制动的同时,智能 钩(15)松开,伸缩箱(3)外侧的可伸缩双层材料板通过可伸缩旋转铰链(16) 旋转到地面上,供行人的腿部安放,车辆控制中心继续完全制动车辆至静止,行 人将脚踩双层材料板,手抓防护网(7)随同车辆静止。过程如图22-27所示, 图22:行人处于距车头的危险距离,此时碰撞发生器处于压缩状态,图23:行 人处于碰撞不可避免距离之和的二分之一时,处于压缩状态的装置伸长,图24: 行人被保护层前端撞倒,落在防护网上,行人抓住了防护网,图25:监测到s102 步骤的行人的胸部,腿部均处于车头纵向中心线左右各四分之一车宽w内,智 能解网钩松开,防护网在行人重力作用下,随同行人一起落在保护层上,保护层 上端的孔隙供行人二次抓住,图26:在行人重力的作用和第一阻尼铰链的作用 下,支承保护板、行人和保护层一同沿着伸缩滑轨缓慢发生倾斜,第一阻尼铰链 两端滚子沿着电动伸缩滑轨两侧的伸缩滑轨滑动,图27:车辆控制中心完全制 动车辆至静止的过程中,支承保护板、行人和保护层一同沿着地面滑动一段距离, 并静止于地面,行人此时趴在保护层上,防止行人直接被公交车车头所撞击而造 成严重的人车碰撞损伤和人地碰撞损伤,甚至进一步碾压行人的现象发生。
72.公交车与行人的撞击点主要是公交车的前部,碰撞传感器可安装在公交车车 头前的车牌处,碰撞发生器中的电动伸缩滑轨(2)安装在防尘罩(1)中的车盘 底下,第一支承板(13)固定在离车头0.1m处,第一支承板(13)的底面固定 在电动伸缩滑轨(2)的最外层凸出的上表面,伸缩箱(3)背面紧靠在第一支承 板(13)前,同时伸缩箱(3)的底板固定在电动伸缩滑轨(2)的最外层凸出的 上表面,支承保护板(9)则在装置压缩时,大部分位于防尘罩(1)内的车底盘 下,其余一部分露出在车头,保护层(10)则可以压缩塞入至支承保护板(9) 和车底盘之间的缝隙。
73.经过上述步骤,该装置不仅充分利用了公交车等平头车的视野盲区区域,还 解决了现有技术中公交车等平头车车头无缓冲区域而直接撞飞行人,造成行人严 重损伤,甚至车辆碾压带来的二次损伤的问题,还结合了最新研究的paeb技术 思想和人车相互作用时间越长,人地损伤越低的思想,其中,装置所伸出的长度 与汽车的发动机罩长度相联系,斜面倾角的大小与汽车的发动机罩倾角相联系, 能够更好的为研究如何通过控制制动以降低人地损伤的防护提供新方向。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。