1.本发明涉及一种农业机器人,特别是一种基于双目三维视觉定位的水培叶菜采收机器人。
背景技术:
2.我国是世界上蔬菜生产量最大的国家,蔬菜年产量约占世界年生产总量的60%,其中叶菜年产量占蔬菜年生产总量的1/3左右。我国的人均可种植耕地面积较小,因此栽培于温室大棚内不依托于土壤的水培叶菜的种植模式得到了快速发展;但温室大棚内高温高湿,人工采收的作业模式不易实施,且采收效率较低。由此,水培叶菜自动采收机械应运而生。然而现有的水培叶菜自动采收机械尚不成熟,或多或少存在一些不足。
3.例如,申请号202110752529.9所述的回转驱动式水培叶菜全自动采收车的不足是:1.采收切入角度过大造成叶菜外部叶片损伤大。2.链式结构无法承载重量较大采收爪部件,造成运输晃动,叶菜在运输过程中易滚落。3.叶菜从高处坠落的收集方式极大地损伤了叶菜叶片。4.依靠光电传感器及反光板的定位方式操作复杂,且安装反光板需要一定的培训技能,在更换栽培板之后需要重新定位。
4.申请号202110498624.0所述的直线驱动式水培叶菜全自动采收车存在不足是:1.菜筐的容量较小,运输来回频繁。2.叶菜在水平运输的过程中极易掉落,造成叶片损伤。3.采收手指的边缘处较为锋利,叶菜表面容易留下划痕。4.采收气缸驱动的推菜板对叶菜叶片的冲击力较大,且针对不同高度的叶菜,效果差异较大,且多呈侧方坠落的方式,叶菜损伤大。
5.因此,研发新一代高速低损采收且定位便捷的水培叶菜采收机器人,极为必要。
技术实现要素:
6.本发明的目的是克服上述背景技术的不足,提供一种基于双目三维视觉定位的水培叶菜采收机器人;该机器人应能在温室大棚内对水培叶菜进行准确定位并实现全自动采收作业,以提高水培叶菜采收过程工作效率,且能降低水培叶菜叶片损伤率,还具有单次采收容量大、收集摆放归整、有利于叶菜规模化采收以及后续装箱的特点。
7.本发明提供的技术方案是:一种基于双目三维视觉定位的水培叶菜采收机器人,包括配有行走组件和收集框的机架以及控制器;其特征在于:该水培叶菜采收机器人还包括可前后运动地定位在机架上且带动采收平台的采收平台升降机构以及安装在采收平台上的叶菜止倾机构、叶菜采收机构、叶菜分离机构;
8.所述叶菜止倾机构包括排列成两排且前后成对布置的若干对止倾挡板,以及排列成两排且前后成对布置的若干对可动止倾挡板;以保证每对止倾挡板中间的待采收水培叶菜不会倾倒;可动止倾挡板还与对止倾挡板横向交错排列,并且可前后移动,以在操作时使得所有止倾挡板中的待采收水培叶菜横向处于同一直线;
9.所述叶菜分离机构包括可前后移动地定位在采收平台的分离推移横梁、固定在分
离推移横梁上的叶菜采收机构以及可前后方向施力于所述分离推移横梁的气缸;
10.所述叶菜采收机构包括水平布置且可竖直活动地定位在分离推移横梁上的轻型仿生圆柱手指横梁、竖直驱动所述轻型仿生圆柱手指横梁的三轴气缸以及水平且规则排列布置在轻型仿生圆柱手指横梁上若干对轻型仿生圆柱手指。
11.所述行走组件包括设置在类龙门式支撑框架底部的行走部件容纳箱以及位于行走部件容纳箱底部且可沿着轨道行走的伺服驱动轮以及v型轮。
12.所述收集框设置在机架后侧,框内空间由十字隔板分隔。
13.所述采收平台升降机构包括连接采收平台驱动连接横梁0107两端的两个门字型框架、通过第一直线导轨连接每个门字型框架的第一气动滑台以及连接第一气动滑台的采收平台横梁。
14.所述采收平台升降机构通过采收平台驱动连接横梁0107连接固定在类龙门式支撑框架顶部的线性模组,从而实现在机架上的前后运动。
15.采收平台支撑型材布置在类龙门式支撑框架的左右两侧,两个第二直线导轨沿前后方向分别布置在每个采收平台支撑型材上,第二直线导轨的滑块则与门字型框架两根立柱的底部相连。
16.所述若干对止倾挡板包括横向排列且间隔距离地布置在平台主体横梁上的若干第一止倾挡板以及横向排列且间隔距离地布置在止倾挡板安装横梁上的若干第二止倾挡板;所述第二止倾挡板还与第一止倾挡板前后间隔距离并且一一成对布置,第二止倾挡板与第一止倾挡板之间的空隙下方正对着栽培板的一个栽培穴孔,也与两个成对的轻型仿生圆柱短手指之间的空间相对应。
17.所述若干对可动止倾挡板横向排列成两排且间隔距离地布置在口字型框架上,两排可动止倾挡板前后间隔距离并且一一成对布置,成对的两个可动止倾挡板之间的空隙下方正对着栽培板的一个栽培穴孔,也与两个成对的轻型仿生圆柱长手指之间的空间相对应;所述口字型框架与第二气动滑台连接,第二气动滑台的滑杆则安装在采收平台横梁上。
18.所述分离推移横梁与第三直线导轨的滑块连接,第三直线导轨则按照前后方向水平布置在安装在采收平台两侧。
19.本发明的有益效果:
20.本发明提供的水培叶菜采收机器人,能通过工业相机对栽培穴孔进行精准定位,配合行走部件伺服系统反馈,从多方位多角度对叶菜进行精准采收定位;叶菜采收机构所用大容差轻型仿生圆柱手指,其与叶菜接触面积更小,具备容差调整能力,更易抽离,对叶菜损伤更小。叶菜止倾机构所用止倾挡板构造,依靠叶菜本身的重力限制叶菜的位姿,有效防止了叶菜平移过程中的掉落;且机构本身不对叶菜作任何夹持,与包络线叶菜夹持机构相比,不仅结构简单,且几乎对叶菜叶片不造成任何损伤;其安装在栽培穴孔叶菜上方,能够在面对菜密集型种植密度的水培叶菜时,不用直接将夹持机构作用于栽培板上的叶菜,进一步减少了损伤;同时该机构还能将叶菜归整至同一平面,便于收集框“一菜一格”的精准低损采收。收集框采用“一菜一格”的容量设计,为含水量较大且叶片脆弱损伤影响卖相的高经济水培叶菜所设计;常规水培叶菜可采用统一的收集框,效率更高,收集系统针对不同品种的水生叶菜灵活多变。机器人整机自动化、现代化程度高,重点面向水培叶菜的低损采收。
附图说明
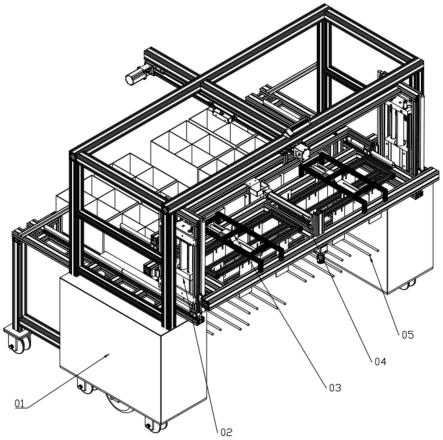
21.图1为本发明的立体结构示意图。
22.图2为本发明的主视结构示意图。
23.图3为本发明中机架的立体结构示意图。
24.图4为本发明中机架的主视结构示意图。
25.图5为本发明中采收平台的立体结构示意图之一(位置一)。
26.图6为本发明中采收平台的立体结构示意图之二(位置一)。
27.图7为本发明中采收平台的左视结构示意图(位置一)。
28.图8为本发明中采收平台横梁的立体结构示意图。
29.图9为本发明中叶菜止倾机构的立体结构示意图。
30.图10为本发明中采收平台的立体结构示意图之三(位置二)。
31.图11为本发明中采收平台的左视结构示意图之二(位置二)。
32.图12为本发明中采收平台的立体结构示意图之四(位置三)。
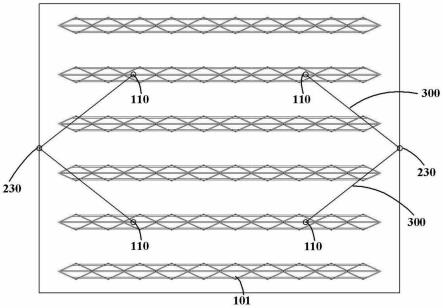
33.图13为本发明中栽培板及行走轨道示意图。
34.附图标记:
35.01—机架、0101—行走部件容纳箱、0102—伺服驱动轮、0103—v型轮、0104—类龙门式支撑框架、0105—收集框、0106—线性模组、0107—采收平台驱动连接横梁、0108—深度相机、0109—采收平台支撑型材、02—采收平台升降机构、0201—门字型框架、0202—第一直线导轨、0203—第一气动滑台连接件、0204—第一气动滑台、0205—第一滑块连接件、0206—第二滑块连接件、0207—第二直线导轨、03—叶菜止倾机构、0301—采收平台横梁、0302—第一止倾挡板、0303—止倾挡板安装横梁、0304—第二止倾挡板、0305—口字型框架、0306—第二滑台固定支架、0307—第二气动滑台、0308—第二气动滑台连接件、0309—可动止倾挡板、0310—第二口字型框架连接件、0311—工业相机、04—叶菜分离机构、0401—气缸安装立柱、0402—气缸安装托板、0403—气缸、0404—第三直线导轨、0405—第三滑块连接件c、0406—分离推移横梁、0407—气缸末端连接件、05—叶菜采收机构、0501—轻型仿生圆柱手指横梁、0502—第一三轴气缸连接件、0503—第二三轴气缸连接件、0504—三轴气缸、0505—导向立柱、0506—导向圆轴连接件、0507—导向圆轴、0508—直线轴承、0509—轻型仿生圆柱手指安装板、0510—锁紧环、0511—轻型仿生圆柱长手指、0512—轻型仿生圆柱短手指。
36.下面结合附图对本发明作进一步描述。
37.为叙述方便,本文采用x、y、z坐标系,如图1所示;前后即y方向,左右即x方向,竖直即z方向。
38.本发明提供的水培叶菜采收机器人包括01机架、02采收平台升降机构、03叶菜止倾机构、04叶菜分离机构及05叶菜采收机构。
39.参见图1,图2,图13;所述的机架上定位着采收平台,所述采收平台可沿y方向移动,并且定位在类龙门式机架横梁下方和栽培板的上方(也可移动地定位在两根并行圆柱轨道上方)。所述采收平台升降机构设置在采收平台的两侧。所述叶菜止倾机构设置在采收平台的上方。所述叶菜分离机构设置在采收平台的上方,其位置与叶菜止倾机构处于同一平面上。所述叶菜采收机构设置在采收平台的下方,其位置在叶菜止倾平台的下侧,栽培板
的上方。
40.参见图3,图4;所述机架用于机器人整体行走、收集框放置、叶菜整体识别定位以及为采收平台提供支撑;该机构包括行走部件容纳箱0101、伺服驱动轮0102、v型轮0103、类龙门式支撑框架0104、收集框0105、线性模组0106、采收平台驱动连接横梁0107、深度相机0108、采收平台支撑型材0109。其中行走部件容纳箱设置在类龙门式支撑框架的两侧底部,其内部包含刹车装置、电源设备及控制计算单元(图中未标出),伺服驱动轮及v型轮呈前后分布安装在单侧行走部件容纳箱底部,其与圆柱轨道相接触。所述收集框共计八个布置在机架后方,其内有十字隔板阻断,单个隔板空间内可容纳高经济易碎的水培叶菜一株,收集框底部的放置板上有限位凸起(图中未标出),防止收集框在机器人启停及移动过程中发生晃动。所述线性模组(直线传动装置;外购件)沿y方向水平地安装在类龙门式支撑框架0104顶部的中间,其线性模组滑台通过采收平台驱动连接横梁0107与采收平台升降机构中的门字型框架的横梁相连,为采收平台沿y方向移动提供驱动力。类龙门式支撑框架内部沿y方向两侧分别安装有采收平台支撑型材,为采收平台在机架内部提供主要支撑。所述深度相机安装在类龙门式支撑框架前上,可识别水培叶菜品种、整体位置及作业区域。
41.参见图5、图7;所述采收平台升降机构用于控制采收平台沿y方向及z方向的位移;该机构包括门字型框架0201、第一直线导轨0202、第一气动滑台连接件0203、第一气动滑台0204、第一滑块连接件0205、第二滑块连接件0206、第二直线导轨0207;所述门字型框架由一根横梁及两根立柱构成,为采收平台升降机构的其余部件提供支撑;两个第一直线导轨分别竖直安装在门字型框架的两侧,两个第一直线导轨的滑块分别通过所述第一滑块连接件连接采收平台横梁(参见图8,连接点0301.1),使得采收平台能够沿着第一直线导轨上下运动;所述第一气动滑台0204设置在门字型框架内部,该滑台的滑杆固定架通过第一气动滑台连接件0203与门字型框架的两个立柱连接,该滑台的前侧通过连接件朝内(图7中垂直于纸面且往内方向)与采收平台横梁相连,滑台启动时就能带动采收平台沿z方向的上下移动;所述第二直线导轨沿前后方向水平固定在两侧采收平台支撑型材0109上,第二直线导轨上的滑块则通过第二滑块连接件与门字型框架两根立柱的底部相连,用于为采收平台主体的沿y方向位移(即前后位移)提供导向与部件支撑。
42.参见图8,图9,图10,图13;所述叶菜止倾机构用于限制叶菜的姿态,以及调整叶菜坠落的相对位置。由于水培叶菜栽培板的培穴孔设计,为叶菜采光需要,前后两排的栽培穴孔是相互错开的。为了采收方便,需要将每两排的水培菜调整为一字形排列的一排(称为“归整”),本发明设计了叶菜止倾机构。
43.该机构包括采收平台横梁0301、第一止倾挡板0302、止倾挡板安装横梁0303、第二止倾挡板0304、口字型框架0305、第二滑台固定支架0306、第二气动滑台0307、第二气动滑台连接件0308、可动止倾挡板0309、口字型框架连接件0310,工业相机0311。所述采收平台横梁(如图8所示)水平布置为采收平台提供主要支撑(采收平台横梁上还安装一个止倾挡板安装横梁0303);若干个所述第一止倾挡板沿x方向按固定间距依次布置(横向排列成一排)在采收平台横梁侧面,若干个第二止倾挡板沿x方向按固定间距依次布置(横向排列成一排)在止倾挡板安装横梁0303侧面;每个第一止倾挡板与一个第二止倾挡板对应布置(前后成对布置),安装后每一对之间的空间正对着位于下方栽培板的栽培穴孔(同时与两个轻型仿生圆柱短手指0512之间的空间也相对应);两块挡板之间的距离及安装高度可调整,可
以适配不同叶菜品种的直径及高度;止倾挡板的作用在于限制叶菜在搬运过程中沿y方向的倾倒,以及配合后续机构实现叶菜的归整与分离。所述口字型框架0305水平布置且可移动地定位在采收平台横梁上,其相对的两个框架条的侧面相互平行安装有若干可动止倾挡板,每个框架条上的可动止倾挡板之间间隔距离;一个框架条上的每个可动止倾挡板与另一个框架条上相对应的一个可动止倾挡板成对布置,每个可动止倾挡板的位置处于两个第一止倾挡板之间或者两个第二止倾挡板之间;并且成对的两个可动止倾挡板之间的空间,正对着下方的栽培板的一个栽培穴孔(同时与两个轻型仿生圆柱长手指0511之间的空间相对应);口字型框架在驱动源的驱动下可以沿y方向位移,使得可动止倾挡板可以前移至与第一止倾挡板或者与第二止倾挡板处于同一条直线上(工作时,可将待采收的后排水培叶菜上半部折弯至前一排的水培叶菜之间),即使得待收割的整排叶菜处于同一条直线上,这个过程被称之为归整,其驱动源为第二气动滑台;所述第二气动滑台0307通过口字型框架连接件0310与口字型框架相连,第二气动滑台的滑杆通过第二气动滑台连接件0308安装在第二滑台固定支架0306上,第二滑台固定支架两侧的底端则固定安装在采收平台横梁上。
44.参见图12;所述叶菜分离机构用于分离叶菜,使得叶菜呈较硬的根部向下坠落,该方式为低损收集方式,具体作用为将仿生手指从止倾挡板下方抽离;该机构包括气缸安装立柱0401、气缸安装托板0402、气缸0403、第三直线导轨0404、第三滑块连接件0405、分离推移横梁0406、气缸末端连接件0407;所述气缸水平布置,气缸底部通过气缸安装托板安装在气缸安装立柱上,所述气缸安装立柱安装在采收平台横梁的前方中部,所述气缸的气缸杆前端通过气缸末端连接件0407与分离推移横梁0406中部相连;所述分离推移横梁沿x方向水平布置,所述第三直线导轨0404安装在采收平台横梁两侧,其滑块通过第三滑块连接件与分离推移横梁两端相连,上述部件的作用在于使得分离推移横梁可以沿y方向位移。
45.参见图12,图13;所述叶菜采收机构用于叶菜的提拉式采收;该机构包括轻型仿生圆柱手指横梁0501、第一三轴气缸连接件0502、第二三轴气缸连接件0503、三轴气缸0504、导向立柱0505、导向圆轴连接件0506、导向圆轴0507、直线轴承0508,轻型仿生圆柱手指安装板0509、锁紧环0510、轻型仿生圆柱长手指0511、轻型仿生圆柱短手指0512;所述轻型仿生圆柱长手指及轻型仿生圆柱短手指各四对沿x方向呈一定间距排列;每个手指通过锁紧环及轻型仿生圆柱手指安装板安装在轻型仿生圆柱手指横梁上(参见图6)。所述栽培板上交错分布有四个栽培孔排成两排,两个栽培板共计八个栽培孔,所述栽培孔内栽培有水培叶菜,每一对轻型仿生圆柱手指对应于栽培板上的栽培孔位置。轻型仿生圆柱长手指及轻型仿生圆柱短手指相互平行布置,两个一对的轻型仿生圆柱长手指及两个一对的轻型仿生圆柱短手指还间隔距离并且交错布置,每对手指之间的间隔空间正对着下方的一个栽培穴孔;由于每个手指均通过螺栓及相应压板固定在轻型仿生圆柱手指横梁,因此可通过转动螺栓即可调节手指的固定位置,使得两个手指之间的间距可调,以适应不同直径的叶菜根部;也使得每个手指沿y方向长度可调,以大容差适应视觉定位及伺服系统的定位误差;轻型仿生圆柱手指重量更轻,刚性更佳,且接触面积小更平滑。所述三轴气缸竖直布置,通过第二三轴气缸连接件与分离推移横梁相连并固定在其中部;所述第一三轴气缸连接件0502安装在三轴气缸底端并与轻型仿生圆柱手指横梁0501中部相连,所述导向立柱连接件0506安装在轻型仿生圆柱手指横梁左右两端;所述导向立柱竖直布置并且其上端与分离推移横梁左右两侧下表面相连,所述导向圆轴0507竖直布置,其下端插入导向立柱连接件并用螺
栓固连,上端通过直线轴承可上下位移地定位在导向立柱内部;上述部件的作用在于使得轻型仿生圆柱手指横梁可以沿z方向位移。
46.本发明中,各机构及组件的工作位置信号分别由若干个传感器以及接近开关、深度相机、工业相机与编码器,输至控制器(单片机控制主板;图中省略),再由控制器对各机构及组件的工作次序与动作行程分别进行控制;这些均为常规控制技术,本文不再一一细述。
47.本发明还配置有连通各气动部件(如气缸)使用的气源(优选空气压缩机;图中省略)。
48.本发明的运行过程,包括如下步骤:
49.步骤一、装置整体处于起始位置(如图1,2所示),包括采收平台位于机架的最前端,采收平台升降机构内的第一气动滑台将采收平台降至最底端,叶菜止倾机构内的第二气动滑台处于原位,即止倾挡板处于交错状态,叶菜分离机构内的气缸处于收回位置,叶菜采收机构内的三轴气缸处于伸出状态,即轻型仿生圆柱手指支架处于下放状态,采收平台的状态如图5,6,7所示;
50.步骤二、工作人员点击启动按钮,机器人沿着圆柱轨道向前移动(y方向运动),广角深度相机识别叶菜的种类及种植面积,构建三维点云模型,并大致估算作业的范围进行采收作业任务配置,位于采收平台横梁下方的工业相机精准识别栽培穴孔的位置,并帮助机器人跨过那些并未种菜的空穴孔,防止空抓,同时移动部件中的伺服系统给予位置补偿,当检测到第一排水培叶菜时,移动部件提前计算减速,使轻型仿生圆柱手指精准停留在第一排水培叶菜的根部(每一对的两个轻型仿生圆柱手指岔开在每个水培叶菜的根部两侧);
51.步骤三、三轴气缸带动轻型仿生圆柱手指及其所夹持的水培叶菜快速向上移动,使得水培叶菜能够位于两块止倾挡板之间;第二气动滑台带动可动止倾挡板运动(y方向运动),使得所有止倾挡板内的水培叶菜排列成横向同一排;第一气动滑台带动采收平台提升,使得轻型仿生圆柱手指连同水培叶菜的根部高过收集框的上边缘,线性模组驱动采收平台向后移动,定位到第一排收集框格子所在的位置(共四排),随后气缸带动轻型仿生圆柱手指向后抽出,水培叶菜由于止倾挡板的作用留在原地,且下方无轻型仿生圆柱手指支撑,呈根部朝下的姿态坠落至隔板空间内;
52.步骤四、气缸缩回,第二气动滑台恢复原位,线性模组带动采收平台向前移动返回原位,当采收平台位于最前方时,三轴气缸伸出,第一气动滑台下降,各机构处于初始位置,随后移动部件启动继续前向运动,检测到下一排水培叶菜时重复步骤二至四;
53.步骤五、当收集框内(四排)叶菜收满时,机器人返回原位,工作人员按下暂停按钮,由工作人员完成收集框的搬运以及替换新的收集框,待到准备就绪时,工作人员复位暂停,机器人完成步骤二至五;
54.步骤六、机器视觉系统测量了大致的作业区,当作业区内水培叶菜都采收完成后,机器人返回原位并发出提示,工作人员随后关闭机器电源,完成本次采收作业。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。